SISTEMA DE EMPUJADORES PARA MAQUINAS DE FORMACION DE ARTICULOS DE VIDRIO HUECOS.
Sistema de empujadores para máquinas IS de formación de artículos de vidrio huecos que comprende al menos un dispositivo (1) empujador capaz de transferir uno o más artículos (P) desde una primera posición (2),
a un lado de un transportador (1), hasta una segunda posición sobre dicho transportador (T), en el que el dispositivo (1) empujador tiene una estructura (6, 7) fija, una cabeza (3) de agarre móvil para los artículos (P) y medios de impulsión para dicha cabeza (3), comprendiendo dichos medios de impulsión una disposición cinemática con brazos (10a, 11a, 11b) articulados que soportan dicha cabeza (3), siendo impulsada la disposición cinemática por un primero y un segundo motores eléctricos (15, 18), caracterizado porque dicha disposición cinemática comprende:
- dos brazos (10a, 11a) principales montados rotablemente sobre dicha estructura (6, 7) fija, siendo impulsado cada brazo (10a, 11a) principal en rotación por un respectivo de dichos motores (15, 18),
- un tercer brazo (11b) articulado a uno (11a) de dichos brazos (10a, 11a) principales alrededor de un primer eje (C), y
- una estructura (10b) móvil para soporte de dicha cabeza (3), articulada tanto a dicho tercer brazo (11b) alrededor de un segundo eje (D) como al otro (10a) de los brazos (10a, 10b) principales,
en el que dichos brazos (10a, 11a) principales pueden rotar alrededor de un eje (A) común o alrededor de respectivos ejes de rotación (A'', A'') que están separados y son paralelos entre sí, siendo dichos primero y segundo ejes (C, D) paralelos entre sí y al eje (A) o a los ejes (A'', A'') de rotación de dichos brazos (10a, 10) principales
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06425587.
Solicitante: BDF HOLDING S.P.A.
Nacionalidad solicitante: Italia.
Dirección: VIA DELL' INDUSTRIA, 40,36100 VICENZA.
Inventor/es: SASSO, DANIELE, BELLINA, CLAUDIO.
Fecha de Publicación: .
Fecha Solicitud PCT: 10 de Agosto de 2006.
Fecha Concesión Europea: 19 de Mayo de 2010.
Clasificación Internacional de Patentes:
- C03B9/453 QUIMICA; METALURGIA. › C03 VIDRIO; LANA MINERAL O DE ESCORIA. › C03B FABRICACION O MODELADO DE VIDRIO O DE LANA MINERAL O DE ESCORIA; PROCESOS SUPLEMENTARIOS EN LA FABRICACION O MODELADO DE VIDRIO O DE LANA MINERAL O DE ESCORIA (tratamiento de la superficie C03C). › C03B 9/00 Soplado del vidrio; Producción de artículos de vidrio hueco soplados. › Medios para empujar los objetos de vidrio sobre un transportador automático después de su formación, p. ej. mecanismos de barrido; Placas de espera.
Clasificación PCT:
- C03B9/453 C03B 9/00 […] › Medios para empujar los objetos de vidrio sobre un transportador automático después de su formación, p. ej. mecanismos de barrido; Placas de espera.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Sistema de empujadores para máquinas de formación de artículos de vidrio huecos.
La presente invención se refiere a un sistema denominado empujador para máquinas I.S. de formación de artículos de vidrio huecos, del tipo de incluye uno o más dispositivos empujadores, dicho o cada dispositivo es capaz de transferir uno o más artículos desde una primera posición, sobre un lado de un transportador móvil, a una segunda posición, sobre dicho transportador.
Los dispositivos de manipulación denominados "empujadores" se usan en máquinas IS para transferir artículos terminados -que a la salida de un molde de terminado se sitúan sobre una mesa de enfriamiento (o "mesa de espera")- sobre una cinta transportadora situada enfrente de la máquina. Normalmente, las máquinas IS comprenden varias secciones de formación, cada una equipada con al menos un dispositivo empujador, y la cinta transportadora recoge los artículos producidos por todas las secciones. En este tipo de máquinas, son muy importantes la precisión y la repetibilidad del movimiento para transferencia de los artículos desde la mesa de refrigeración a la cinta transportadora, ya que cada dispositivo empujador tiene que enviar los artículos producidos desde la respectiva sección a la cinta, que se desplaza a una velocidad relativamente alta (del orden de aproximadamente 60-65 m/min) y tiene que insertar estos artículos entre otros artículos ya presentes en la cinta (los que llegan y los que ya han pasado) con un espacio entre un artículo y el próximo que puede ser tan pequeño como 20-30 mm.
De la solicitud de patente CZ-A-288848 se conoce un dispositivo empujador para máquina IS, que comprende dos motores eléctricos, montados sobre una estructura de soporte de manera tal que sus respectivos ejes motrices son paralelos. El eje del primer motor se conecta, a través de una primera transmisión de la cinta, a un eje hueco y el eje del segundo motor pasa a través del primer eje hueco. El eje hueco soporta una articulación mecánica de tipo paralelogramo que comprende un órgano de soporte, al menos dos brazos y una cabeza para agarrar y manipular los artículos. Dos pasadores rotatorios están engoznados al órgano de soporte y están interconectados a través de una segunda transmisión de la cinta sostenida por el propio órgano, al eje del segundo motor. Cada uno de los pasadores soporte un respectivo brazo, que está articulado en su extremo distal a la agarradera y a la cabeza de manipulación.
En el dispositivo descrito en CZ-A-288848 la estructura de la articulación mecánica que produce el desplazamiento de la cabeza de agarre tiene una rigidez general baja y está afectada por el juego operativo, debido a la presencia del sistema de transmisión de los pasadores sobre el órgano de soporte: esta es la fuente de vibraciones, tanto al realizar el movimiento como en su extremo, con posible ubicación de errores, alargamiento y colisiones consecuentes. Estos inconvenientes se ven incrementados por la considerable masa en movimiento impulsada por el primer motor durante la rotación de transferencia. La presencia de un sistema de transmisión mecánico sobre el órgano de soporte produce una carga inerte adicional, que actúa desventajosamente para el rendimiento dinámico de la articulación mecánica.
El objetivo general de la presente invención es producir un dispositivo empujador sin inconvenientes.
Este y otros objetivos, que se evidenciarán más adelante, se logran de acuerdo con la invención mediante un sistema que tiene las características de la reivindicación 1 adjunta. En las subreivindicaciones se indican características preferentes de la invención. Las reivindicaciones son parte integral de la enseñanza técnica presentada en la presente con respecto a la invención.
Las características y ventajas de la invención se manifestarán en la siguiente descripción con referencia a los dibujos adjuntos, que se aportan como ejemplo no limitativo, en los que:
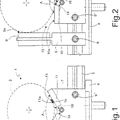
- la figura 1 es una vista en planta esquemática de un dispositivo empujador de acuerdo con la invención, operativo entre una mesa de enfriamiento de una máquina IS y una cinta transportadora;
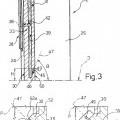
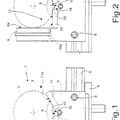
- las figuras 2 y 3 son vistas respectivas, desde diferentes ángulos, del dispositivo empujador de la figura 1;
- la figura 4 es una vista parcial esquemática de los componentes principales de una articulación mecánica del dispositivo empujador de las figuras 1-3;
- las figuras 5, 6, 7 y 8 son secciones parciales y esquemáticas a lo largo de las líneas V-V, VI-VI, VII-VII y VIII-VIII de la figura 1, respectivamente (en estas secciones solamente se muestran los elementos útiles para entender la invención);
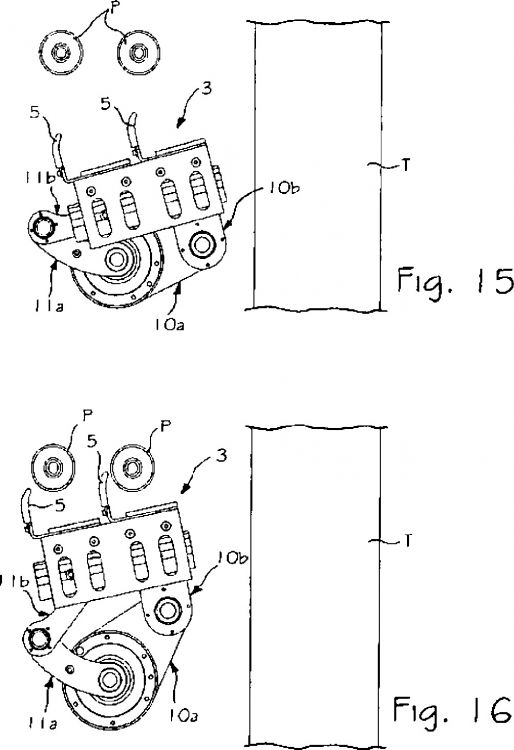
- las figuras 9-16 son vistas en planta esquemáticas de posiciones sucesivas adoptadas por el dispositivo empujador de acuerdo con la invención;
- la figura 17 es una representación esquemática del principio de una posible realización variante de una articulación mecánica propuesta de acuerdo con la invención.
En la figura 1, el número 1 indica un dispositivo de manipulación o empujador en su conjunto de acuerdo con la invención, el número 2 indica una mesa de enfriamiento o mesa de descarga, de una sección de formación de una máquina IS, representada esquemáticamente por el bloque M. Durante la operación de la máquina M, uno o más artículos de vidrio permanecen temporalmente sobre la mesa 2 en una posición de enfriamiento y de espera, a la salida de un respectivo molde de de terminación de la antes mencionada sección de formación. T indica una cinta transportadora, que se desplaza en el sentido indicado por la flecha F, destinada a recibir los artículos P que se desplazan por medio del dispositivo 1 empujador desde la mesa 2 a la cinta transportadora T. A este fin, el dispositivo empujador tiene una cabeza de agarre y manipulación, que comprende un bastidor 4 de soporte dotado con dedos 5 de agarre.
El movimiento de transferencia de los artículos P desde la posición de espera sobre la mesa 2 hasta la posición de llegada sobre la cinta T es transmitido por la cabeza 3 por medio de un sistema de empuje -que constituye el objeto concreto de la presente invención- que comprende una articulación mecánica con brazos articulados y dos motores eléctricos.
Con referencia a las figuras 2-4, dicho mecanismo incluye un primero y un segundo brazos. Indicados con los numerales 10a y 11a, respectivamente, que son móviles sobre una mesa 6, debajo de la cual se extiende una estructura fija del dispositivo 1, indicada con el numeral 7 en su conjunto.
En el caso ilustrado, los brazos 10a y 11a están montados rotablemente con respecto a la mesa 6 y a la estructura 7, en un respectivo primer extremo para rotar alrededor de un eje fijo común identificado con la letra A en la figura 4, dicho eje es sustancialmente ortogonal a los planos de reposo de los artículos P. definidos por la mesa 2 y la cinta transportadora T. Adviértase que las figuras representan el caso concreto en el que los ejes de rotación de los brazos 10a y 11a coinciden, con los dos grados de libertad de la articulación mecánica en correspondencia con el eje identificado con la letra A: en realizaciones alternativas de la invención, sin embargo, los ejes de rotación y, por lo tanto, los grados de libertad de la articulación mecánica -esencialmente pentalateral- pueden estar escalonados y ser paralelos.
El brazo 10a está articulado, en su segundo extremo, con una estructura 10b móvil alrededor de un eje indicado con la letra B, mientras que el brazo 11a está articulado, en su segundo extremo, con un tercer brazo 11b, alrededor de un eje indicado con la letra C. El brazo 11b está también articulado, en su extremo distal, con una estructura 10b móvil alrededor de un eje indicado con la letra D, paralelo a los ejes A - C.
En el ejemplo ilustrado, la estructura 10b móvil tiene forma sustancialmente de codo, con dos partes ortogonales entre sí o, en todo caso, transversales una a la otra -de diferentes longitudes. El eje B está situado en la parte más corta, mientras que el eje D está situado en la parte más larga. La estructura 10b móvil materializa un soporte para una barra 4a de sección, sobre la que está montado el bastidor 4 de la cabeza 3. En la figura 2 se puede ver que el cuerpo de la estructura 10b móvil está formado principalmente de una parte 10b' cilíndrica, desde la que se extienden dos partes 10b'' similares a placas paralelas, entre las cuales están insertados y articulados los extremos del brazo 11b. EL extremo opuesto del brazo 11b...
Reivindicaciones:
1. Sistema de empujadores para máquinas IS de formación de artículos de vidrio huecos que comprende al menos un dispositivo (1) empujador capaz de transferir uno o más artículos (P) desde una primera posición (2), a un lado de un transportador (1), hasta una segunda posición sobre dicho transportador (T), en el que el dispositivo (1) empujador tiene una estructura (6, 7) fija, una cabeza (3) de agarre móvil para los artículos (P) y medios de impulsión para dicha cabeza (3), comprendiendo dichos medios de impulsión una disposición cinemática con brazos (10a, 11a, 11b) articulados que soportan dicha cabeza (3), siendo impulsada la disposición cinemática por un primero y un segundo motores eléctricos (15, 18), caracterizado porque dicha disposición cinemática comprende:
en el que dichos brazos (10a, 11a) principales pueden rotar alrededor de un eje (A) común o alrededor de respectivos ejes de rotación (A', A') que están separados y son paralelos entre sí, siendo dichos primero y segundo ejes (C, D) paralelos entre sí y al eje (A) o a los ejes (A', A') de rotación de dichos brazos (10a, 10) principales.
2. Sistema de acuerdo con la reivindicación 1, en el que dicho otro brazo (10a) principal está articulado a dicha estructura (10b) móvil alrededor de un tercer eje (B), paralelo a dichos primero y segundo ejes (C, D).
3. Sistema de acuerdo con la reivindicación 1 o 2, en el que dicho medio de transmisión comprende un primero y un segundo ejes motrices (13,14), siendo el primer eje motriz (13) impulsado en rotación por dicho primer motor (15) y estando dispuesto con su eje en coincidencia con el eje de rotación (A; A') de uno de dichos brazos (10a, 11b) principales, siendo impulsado el segundo eje motriz (14) en rotación por dicho segundo motor (18) y estando dispuesto con su eje en coincidencia con el eje de rotación (A; A'') del otro de dichos brazos (10a, 11b) principales.
4. Sistema de acuerdo con la reivindicación 3, en el que dicho primer eje motriz (13) es hueco y coaxial don dicho segundo eje motriz (14).
5. Sistema de acuerdo con la reivindicación 4, en el que dichos primero y segundo motores (13, 14) están dispuestos axialmente uno sobre el otro, teniendo dicho primer motor (15) un rotor (15a) sustancialmente coaxial con un rotor (18a) de dicho segundo motor (18).
6. Sistema de acuerdo con la reivindicación 1, en el que se dispone de sensores (27, 28) de posición independientes instalados para controlar rotaciones impulsadas por dichos motores (15, 18).
7. Sistema de acuerdo con las reivindicaciones 3 y 6, en el que un primer sensor (27) de posición está asociado operativamente a dicho primer eje motriz (13) y un segundo sensor (28) de posición está asociado operativamente con dicho segundo eje motriz (14).
8. Sistema de acuerdo con la reivindicación 6 y/o 7, en el que dichos sensores (27, 28) de posición están interconectados con una unidad (CU) de control electrónica diseñada para gestionar rotaciones impulsadas por dichos motores (15, 18), siendo dicha unidad de control (CU) concretamente del tipo programable y que tiene una interfaz de usuario (UI) para introducción de parámetros operativos para gestión de rotaciones de los motores (15, 18).
9. Sistema de acuerdo con la reivindicación 8, en el que dicha unidad de control (CU) está diseñada para implementar un procedimiento de autocalibración de dicha disposición cinemática.
10. Sistema de acuerdo con cualquiera de las reivindicaciones precedentes, en el que dicha estructura (6, 7) fija comprende un alojamiento (15c, 18c) que define una primera cámara (51), que al menos parcialmente rodea un estátor (15b) de dicho primer motor (15), y una segunda cámara (53) que al menos parcialmente rodea un estátor de dicho segundo motor (18), estando dicha primera cámara (51) en comunicación fluida con una entrada (50) de aire frío forzado y estando dicha segunda cámara (53) en comunicación fluida con una o más salidas (54) del aire de enfriamiento, estando dichas cámaras (51, 53) en comunicación fluida entre sí, especialmente a través de pasadizos (52) axiales definidos en dicho alojamiento (15c, 18c).
Patentes similares o relacionadas:
SISTEMA Y MÉTODO PARA LA TRANSFERENCIA DE ARTÍCULOS DE VIDRIO, del 27 de Junio de 2019, de Vitro, S.A.B. de C.V: La presente invención se refiere a un sistema y aun método para la transferencia de artículos de vidrio de máquinas formadoras de artículos de vidrio del tipo que comprende, […]
Sacador de envases, para instalaciones de movimentación de vidrio en caliente, del 8 de Mayo de 2019, de AVACON, S.A.: Sacador de envases, para instalaciones de movimentación de vidrio en caliente; caracterizado porque consta de una pala (P) manipuladora de los envases que comporta dos […]
Disposición de placas de depósito, del 27 de Marzo de 2019, de HEYE INTERNATIONAL GMBH: Disposición de placas de depósito para una máquina de moldeo de vidrio con una placa de depósito que presenta varios huecos (16, 16', 16") dirigidos […]
SACADOR DE ENVASES, PARA INSTALACIONES DE MOVIMENTACIÓN DE VIDRIO EN CALIENTE, del 17 de Enero de 2017, de AVACON, S.A.: Sacador de envases, para instalaciones de movimentación de vidrio en caliente que consta de una pala (P) manipuladora de los envases con dos grados de libertad proporcionados […]
 MÉTODO DE EMPUJE Y DISPOSITIVO PARA TRANSFERIR ARTÍCULOS DE VIDRIO, del 31 de Mayo de 2011, de BOTTERO S.P.A.: Un método de transferir artículos de vidrio desde una placa de soporte intermedio hacia un transportador de descarga ; en donde […]
MÉTODO DE EMPUJE Y DISPOSITIVO PARA TRANSFERIR ARTÍCULOS DE VIDRIO, del 31 de Mayo de 2011, de BOTTERO S.P.A.: Un método de transferir artículos de vidrio desde una placa de soporte intermedio hacia un transportador de descarga ; en donde […]
 DISPOSITIVO DE EMPUJE PARA TRANSFERIR ARTICULOS DE VIDRIO, del 2 de Julio de 2010, de BOTTERO S.P.A.: Un dispositivo de empuje para transferir artículos de vidrio desde una chapa intermedia de soporte a un transportador de descarga; incluyendo el dispositivo […]
DISPOSITIVO DE EMPUJE PARA TRANSFERIR ARTICULOS DE VIDRIO, del 2 de Julio de 2010, de BOTTERO S.P.A.: Un dispositivo de empuje para transferir artículos de vidrio desde una chapa intermedia de soporte a un transportador de descarga; incluyendo el dispositivo […]
 DISPOSITIVO DE EMPUJE PARA TRANSFERIR ARTICULOS DE VIDRIO, del 2 de Julio de 2010, de BOTTERO S.P.A.: Un dispositivo de empuje para transferir artículos de vidrio desde una chapa intermedia de soporte a un transportador de descarga; incluyendo el dispositivo de […]
DISPOSITIVO DE EMPUJE PARA TRANSFERIR ARTICULOS DE VIDRIO, del 2 de Julio de 2010, de BOTTERO S.P.A.: Un dispositivo de empuje para transferir artículos de vidrio desde una chapa intermedia de soporte a un transportador de descarga; incluyendo el dispositivo de […]
DISPOSICIÓN DE PLACAS DE APOYO, del 11 de Agosto de 2011, de HEYE INTERNATIONAL GMBH: Disposición de placas de apoyo para una máquina de conformar vidrio, compuesta al menos por una placa de apoyo provista de determinadas aberturas (9, 9', […]