SISTEMA DE DIAGNOSTICO DE MOTOR INTEGRADO.
Un sistema de diagnóstico de motor de aeronave integrado en la aeronave para la detección de fallos durante el despegue,
que comprende: una pluralidad de sensores (4), incluyendo uno de la citada pluralidad de sensores un sensor de velocidad que genera un valor indicativo de la velocidad de la aeronave; una memoria de datos (12); un procesador (2) acoplado a dichos sensores, el citado procesador almacena datos de la misión en la citada memoria de datos cuando el citado valor de la velocidad se encuentra dentro de un rango de velocidades de Mach 0,22 a Mach 0,33, incluyendo los citados datos de la misión actual valores para los parámetros y valores diferenciales de referencia para los citados parámetros, y en el que los fallos se determinan mediante el cálculo de la pendiente de los valores diferenciales de referencia, siendo una pendiente grande indicativa de la presencia del fallo, y, un indicador (6) de fallo visible desde el exterior de la aeronave; detectando el citado procesador la presencia o ausencia de un fallo como respuesta a los citados datos de la misión actual, almacenando, en la memoria de datos, datos de fallos indicativos de la presencia o ausencia de un fallo, examinando los datos de fallos almacenados para determinar la existencia de un fallo; y activando el citado indicador de fallo como respuesta a la citada presencia de un fallo
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E00306462.
Solicitante: GENERAL ELECTRIC COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 1 RIVER ROAD,SCHENECTADY, NY 12345.
Inventor/es: BROGAN,CHRISTOPHER JOHN, PURSELL,BRYSON MARION, MATCHETT,STEVEN JOSEPH.
Fecha de Publicación: .
Fecha Solicitud PCT: 28 de Julio de 2000.
Fecha Concesión Europea: 7 de Octubre de 2009.
Clasificación Internacional de Patentes:
- B64D45/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64D EQUIPAMIENTO INTERIOR O ACOPLABLE A AERONAVES; TRAJES DE VUELO; PARACAIDAS; DISPOSICIONES O MONTAJE DE GRUPOS MOTORES O DE TRANSMISIONES DE PROPULSION EN AERONAVES. › Indicadores o dispositivos de protección de aeronaves no previstos en otro lugar (camuflaje F41H 3/00).
- G07C3/00 FISICA. › G07 DISPOSITIVOS DE CONTROL. › G07C APARATOS DE CONTROL DE HORARIOS O DE ASISTENCIA; REGISTRO O INDICACION DEL FUNCIONAMIENTO DE LAS MAQUINAS; PRODUCCION DE NUMEROS AL AZAR; APARATOS PARA VOTAR O APARATOS DE LOTERIA; DISPOSICIONES, SISTEMAS O APARATOS PARA CONTROLES NO PREVISTOS EN OTRO LUGAR. › Registro o indicación del estado o del funcionamiento de máquinas o de otros aparatos con la exclusión de vehículos.
Clasificación PCT:
Clasificación antigua:
- G07C3/00 G07C […] › Registro o indicación del estado o del funcionamiento de máquinas o de otros aparatos con la exclusión de vehículos.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Sistema de diagnóstico de motor integrado.
La invención se refiere en general a un sistema de diagnóstico de motor de aeronaves integrado en la aeronave para la detección de fallos durante el despegue y que no requiere sistemas externos para detectar un fallo. La Fuerza Aérea de los EE.UU. actualmente descarga datos de misión de cada uno de los F-16 al final de cada día. Los datos se transfieren a dispositivos de transferencia de datos portátiles y posteriormente se descargan en sistemas de soporte en tierra. A continuación estos datos se comparan con los datos de misiones previas y los fallos de funcionamiento se determinan sobre la base de los datos de tendencias. La infraestructura de los equipos de soporte ha sido poco fiable y costosa de mantener.
Este sistema requiere recursos significativos de mano de obra de mantenimiento y expone al motor y a la aeronave al potencial de tendencia de fallos de tendencias no detectados debido a los problemas relacionados con los equipos del sistema en tierra. Además, el sistema existente no enuncia un fallo de tendencia hasta el final del día, lo cual podría ser después de múltiples misiones. En un escenario en despliegue, el equipo de soporte debe ser transportado al sitio remoto para determinar si existe un fallo de funcionamiento.
El documento US 3.731.070 desvela un analizador de motor de turbina de gas.
El documento US 5.050.081 desvela un procedimiento y un sistema para monitorizar y mostrar parámetros de rendimiento del motor.
Una realización ejemplar de de la invención es un sistema de diagnóstico de motor de aeronaves integrado en la aeronave para detectar fallos durante el despegue, que comprende las características de la reivindicación 1.
Otra realización ejemplar de la invención es un procedimiento para detectar fallos durante el despegue de una aeronave con un sistema de diagnóstico de motor integrado en la aeronave, comprendiendo el procedimiento las etapas de la reivindicación 4.
Realizaciones de la invención se describirán a continuación, a título de ejemplo, con referencia a los dibujos que se acompañan, en los que:
la figura 1 es un diagrama de bloques de un sistema integrado de diagnóstico de motor en una realización ejemplar de la invención;
las figuras 2A y 2B representan un diagrama de flujo del proceso ejecutado por el sistema integrado de diagnóstico de motor de acuerdo a la invención;
la figura 3 muestra un registro de datos ejemplar, y
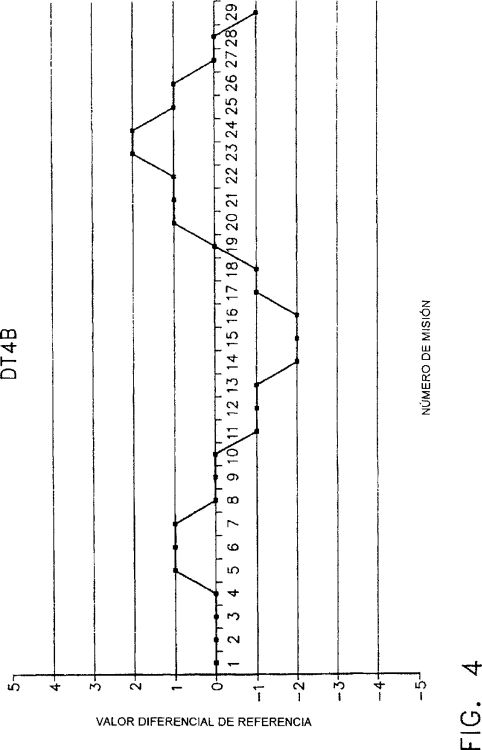
la figura 4 es un gráfico del valor diferencial de referencia respecto al número de misiones para un parámetro del motor.
La figura 1 es un diagrama de bloques de un sistema integrado de diagnóstico de motor en una realización ejemplar de de la invención. El sistema integrado de diagnóstico de motor incluye un procesador 2 que ejecuta el proceso de diagnóstico descrito en la presente memoria descriptiva con referencia a las figuras 2A y 2B. El procesador 2 puede estar implementado usando microprocesadores existentes. Unos sensores 4 están acoplados al procesador 2 y proporcionan los valores de los parámetros del motor (tales como el consumo de combustible) y/o de los parámetros de la aeronave (tal como el número Mach) al procesador 2. Una memoria de programa 10 es una memoria no volátil que contiene el programa que será ejecutado por el procesador 2. La memoria de programa 10 puede ser programable eléctricamente (tal como una EEPROM) de manera que el programa que va a ser ejecutado por el procesador 2 pueda ser actualizado. Una memoria de datos 12 almacena los datos de la misión actual y los datos de misiones anteriores de una pluralidad de misiones anteriores que se utilizan para detectar los fallos que se describen en la presente memoria descriptiva. La memoria de datos 12 puede ser implementada utilizando una memoria no volátil conocida. Un puerto de comunicaciones 8 está acoplado al procesador 2 y se utiliza para cargar datos de configuración (por ejemplo, tipo de aeronave, tipo de motor, etc.) o para descargar datos de configuración y datos de la misión de los datos de memoria 12. El puerto de comunicaciones 8 puede usar protocolos de comunicación existentes, tales como el RS232. El puerto de comunicaciones 8 es accesible preferiblemente desde el exterior de la aeronave.
Tras la detección de un fallo, el procesador activa un indicador 6 de fallo. El indicador 6 de fallo puede incluir un indicador visible por el piloto (por ejemplo, un LED en la cabina) y un indicador visible desde el exterior de la aeronave (por ejemplo, un LED o dispositivo mecánico en el puntal del pocillo de la rueda). Proporcionar una indicación directa de un fallo en el exterior de la aeronave elimina la necesidad de descargar datos de la misión a los sistemas de tierra para detectar un fallo y proporciona detección de fallos en cada misión.
Las figuras 2A y 2B representan un diagrama de flujo del proceso realizado por el sistema integrado de diagnóstico de motor de acuerdo con la invención. En la realización que se muestra en las figuras 2A y 2B, el sistema integrado de diagnóstico de motor está programado para detectar los fallos durante el despegue. El proceso comienza en la etapa 20 cuando la velocidad de la aeronave es monitorizada para detectar si la aeronave se encuentra en un rango de velocidades. El rango de velocidades varía desde aproximadamente Mach 0,22 a aproximadamente Mach 0,33. En este rango de velocidades, la aeronave se encuentra en el proceso de despegue y el motor está en un estado estable y está alcanzando la temperatura normal de funcionamiento. Cuando la aeronave se encuentra dentro de este rango de velocidades, el sistema integrado de diagnóstico de motor adquiere secuencialmente una pluralidad de registros de datos (por ejemplo, cuatro). La adquisición de datos en condiciones uniformes (por ejemplo, dentro de un rango de velocidades predeterminado) produce una detección más precisa de los fallos. Los múltiples registros de datos están separados por un intervalo de muestreo (por ejemplo, 1/2 segundo). Cada uno de los registros de datos contiene los valores indicativos de los parámetros que incluyen parámetros del motor o parámetros de las aeronaves. Un registro de datos ejemplar se muestra en la figura 3, que muestra los parámetros detectados por los sensores 4 y los valores de cada parámetro.
Una vez que se hayan adquirido los múltiples registros de datos, el proceso puede detenerse durante un período de tiempo (por ejemplo, tres minutos) antes de proceder a la etapa 22. El sistema integrado de diagnóstico de motor generará una indicación de fallo en la cabina por medio de un indicador 6 de fallo. La activación del indicador de fallo puede ser retrasada hasta que el avión complete el despegue.
En la etapa 22, la rutina de proceso de valores se inicia para preprocesar los datos de los sensores adquiridos en la etapa 20 antes de la detección de fallos. En la etapa 24, se ejecuta una rutina de validación sobre los valores en cada uno de los registros de datos. La rutina de validación puede aplicar diversas pruebas para determinar si los datos muestreados son apropiados para detectar fallos. El objetivo es confirmar que los valores de cada registro de datos son adecuados para detectar fallos. Debido a que el sistema integrado de diagnóstico de motor compara los datos de la misión actual con los datos de las misiones anteriores para generar fallos, los datos de la misión actual son validados para garantizar una comparación precisa. Una validación ejemplar es confirmar que un valor de un parámetro se ha mantenido constante en los múltiples muestreos. Por ejemplo, para la comparación precisa con las misiones anteriores, puede ser necesario que la posición del regulador permanezca constante en todos los registros de datos. Otra validación ejemplar es confirmar que los valores de un parámetro se encuentran en un rango predeterminado. Si los valores de los registros de datos fallan en la validación, el proceso es finalizado.
Una vez que los valores en cada registro de datos hayan sido validados, se genera un único de registro de datos medios en la etapa 26. El registro de datos medios que contiene un valor medio se obtiene de los registros de datos múltiples, para cada parámetro. En 28, los valores medios se convierten en unidades de ingeniería adecuadas, si es necesario. Los sensores 4 pueden generar las señales en términos de unidades abstractas (por ejemplo, tensión, conteo por segundo, etc.) En la etapa 28, estas unidades abstractas se convierten en unidades de ingeniería (por ejemplo, presión, velocidad, etc.) debido al hecho de...
Reivindicaciones:
1. Un sistema de diagnóstico de motor de aeronave integrado en la aeronave para la detección de fallos durante el despegue, que comprende:
una pluralidad de sensores (4), incluyendo uno de la citada pluralidad de sensores un sensor de velocidad que genera un valor indicativo de la velocidad de la aeronave;
una memoria de datos (12);
un procesador (2) acoplado a dichos sensores, el citado procesador almacena datos de la misión en la citada memoria de datos cuando el citado valor de la velocidad se encuentra dentro de un rango de velocidades de Mach 0,22 a Mach 0,33, incluyendo los citados datos de la misión actual valores para los parámetros y valores diferenciales de referencia para los citados parámetros, y en el que los fallos se determinan mediante el cálculo de la pendiente de los valores diferenciales de referencia, siendo una pendiente grande indicativa de la presencia del fallo, y,
un indicador (6) de fallo visible desde el exterior de la aeronave;
detectando el citado procesador la presencia o ausencia de un fallo como respuesta a los citados datos de la misión actual, almacenando, en la memoria de datos, datos de fallos indicativos de la presencia o ausencia de un fallo, examinando los datos de fallos almacenados para determinar la existencia de un fallo; y activando el citado indicador de fallo como respuesta a la citada presencia de un fallo.
2. El sistema de diagnóstico de motor de la reivindicación 1, en el que: los citados parámetros incluyen parámetros de la aeronave y parámetros del motor, y los citados valores incluyen valores medios.
3. El sistema de diagnóstico de motor de la reivindicación 1, en el que: la citada memoria de datos incluye datos de las misiones anteriores, y el citado procesador detecta la presencia o ausencia de un fallo como respuesta a los citados datos de la misión actual y de los citados datos de las misiones anteriores.
4. Un procedimiento para la detección de fallos durante el despegue de una aeronave que tiene un sistema de diagnóstico de motor integrado en la aeronave, comprendiendo el procedimiento:
determinar (20) cuando la velocidad del avión se encuentra dentro de un rango de velocidades de Mach 0,22 a Mach 0,33, incluyendo los citados datos de la misión actual valores de los parámetros de referencia y valores diferenciales de referencia de dichos parámetros, y en el que el fallo se determina calculando la pendiente de los valores diferenciales de referencia, siendo una pendiente grande indicativa de la presencia de un fallo, obteniendo (20) datos de la misión actual como respuesta a que la velocidad de la aeronave se encuentra dentro del citado rango de velocidades;
detectar (40) la presencia o ausencia de un fallo en respuesta a los datos de la misión actual;
almacenar, en una memoria de datos, los datos de fallos indicativos de la presencia o ausencia de un fallo;
examinar los datos de fallo almacenados para determinar la existencia de un fallo, y
activar (52) un indicador de fallo como respuesta a la citada presencia de un fallo, siendo visible el citado indicador de fallo desde el exterior de la aeronave.
5. El procedimiento de la reivindicación 4, que comprende además:
almacenar los datos de las misiones anteriores; en el que la citada detección de presencia o ausencia de un fallo se realiza como respuesta a los citados datos de la misión actual y a los citados datos de las misiones anteriores.
6. Un medio de almacenamiento codificado con un código de programa informático legible por máquina para la detección de fallos en una aeronave que tiene un sistema de diagnóstico de motor, incluyendo el medio de almacenamiento instrucciones para hacer que un ordenador implemente el procedimiento de la reivindicación 4 o de la reivindicación 5.
Patentes similares o relacionadas:
Estructura de panel para una aeronave y procedimiento de fabricación de la misma, del 8 de Julio de 2020, de AIRBUS OPERATIONS, S.L: Estructura de panel para una aeronave, configurada para soportar grandes impactos de energía, como por ejemplo una colisión con aves, un desprendimiento […]
Procedimiento y dispositivo de identificación de un avión en conexión con el estacionamiento del avión en un puesto de estacionamiento, del 3 de Junio de 2020, de thyssenkrupp Airport Solutions, S.A: Procedimiento de identificación de un avión e indicación del tipo y versión del avión en conexión con el estacionamiento del avión en una puerta […]
SISTEMA Y METODO DE CONTROL OPERATIVO DE UNA AERONAVE NO TRIPULADA, del 26 de Marzo de 2020, de ARBOREA INTELLBIRD S.L: esumenesumen esumen Sistema y método para el control operativo de una aeronave no tripulada, cuyo fin es imposibilitar el despegue de la aeronave si no se ha pedido […]
Sistema de supervisión de un equipo de una aeronave, del 18 de Marzo de 2020, de Safran Electronics & Defense: Sistema de supervisión de un equipo de una aeronave que incluye un módulo electrónico principal y un módulo electrónico subordinado equipados […]
Procedimiento para solicitud de una intervención de un vehículo de control de vuelo electrónico, del 26 de Febrero de 2020, de Schultz, Douglas Allen: Un procedimiento de solicitud de una intervención de un vehículo de control de vuelo electrónico por un piloto a bordo o miembro de la tripulación, en […]
Una unidad auxiliar de potencia con un sistema de detección de incendios integrado, del 4 de Diciembre de 2019, de AIRBUS OPERATIONS SL: Un compartimiento de unidad auxiliar de potencia para una aeronave, que comprende una unidad de potencia auxiliar colocada en el compartimiento de unidad […]
Conjunto de tren de aterrizaje de aeronave que incluye un método y un sistema de monitorización del estado y del uso (HUMS), del 27 de Noviembre de 2019, de Safran Landing Systems UK Ltd: Un conjunto de tren de aterrizaje de aeronave para soportar una aeronave, comprendiendo el conjunto de tren de aterrizaje: un primer subconjunto estructural […]
Procedimiento para identificar un avión en relación con el estacionamiento del avión en una plataforma, del 4 de Septiembre de 2019, de thyssenkrupp Airport Solutions, S.A: Procedimiento para identificar un avión en relación con el estacionamiento del avión en una puerta o plataforma, para la posible conexión de un puente de […]