SENSOR OPTOELÉCTRONICO Y PROCEDIMIENTO PARA MEDIR DISTANCIAS SEGÚN EL PRINCIPIO DEL TIEMPO DE PROPAGACIÓN DE LA LUZ.
- Sensor optoelectrónico (10) para medir distancias según el principio de propagación de la luz,
que comprende un emisor de luz (12) para emitir una señal luminosa, un receptor de luz (16) para recibir una señal de recepción remitida o reflejada, y una unidad de evaluación (18) que está concebida para satisfacer una condición de transición para la señal de recepción por elección sistemática de un tiempo de retardo de emisión para emitir la señal luminosa en un instante de ob servación y para calcular el tiempo de propagación de la luz a partir del tiempo de retardo de emisión necesario para ello, caracterizado porque está previsto un re gulador (44) que está concebido para reconocer si el instante de recepción de la señal de recepción coincide con el instante de observación, y para reajustar el tiempo de retardo de emisión en un bucle de realimentación de modo que se cumpla la condición de transición en el instante de observación
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08105846.
Solicitante: SICK AG.
Nacionalidad solicitante: Alemania.
Dirección: ERWIN-SICK-STRASSE 1 79183 WALDKIRCH/BREISGAU ALEMANIA.
Inventor/es: TORABI,BAHRAM,DR, HUG,GOTTFRIED, HEIZMANN,REINHARD, MARRA,MARTIN.
Fecha de Publicación: .
Fecha Solicitud PCT: 21 de Noviembre de 2008.
Fecha Concesión Europea: 21 de Julio de 2010.
Clasificación PCT:
- G01S17/10 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › que utilizan la transmisión de ondas discontinuas moduladas por pulsos (determinación de la distancia mediante mediciones de fase G01S 17/32).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
La invención concierne a un sensor optoelectrónico y a un procedimiento para medir distancias según el principio del tiempo de propagación de la luz, de acuerdo con las reivindicaciones 1 y 12, respectivamente.
Con sensores optoelectrónicos se puede determinar la distancia de objetos con arreglo al principio conocido del procedimiento del tiempo de propagación de la luz. En un procedimiento del tiempo de propagación de impulsos se emite para ello un corto impulso luminoso y se mide el tiempo hasta la recepción de una remisión o reflexión del impulso luminoso. Como alternativa, en un procedimiento de fase se modula en amplitud una luz de emisión y se determina un desplazamiento de fase entre la luz de emisión y la luz de recepción, siendo también el desplazamiento de fase una medida del tiempo de propagación de la luz. Debido a condiciones de protección de los ojos, los procedimientos de modulación de fase citados en último lugar son menos adecuados precisamente para objetivos poco remitentes a causa de los grandes tiempos de integración necesarios. En el procedimiento de impulsos se puede utilizar provechosamente la potencia integral en el sentido de que se pueden emitir cortos impulsos con alta densidad de energía y se mejora así la relación señal-ruido para cada tiro individual.
La medición de distancias puede ser necesaria, por ejemplo, en el campo de la seguridad de vehículos, la automatización de la logística o las fábricas o la técnica de seguridad. Particularmente, un telémetro que se base en un rayo de luz reflejado puede reaccionar a una variación de la distancia del reflector o del objetivo reflectante o remitente. Una aplicación especial es una barrera óptica de reflexión en la que se vigila la distancia entre un emisor de luz y un reflector. El procedimiento del tiempo de propagación de la luz es también el principio según el cual trabajan los escáneres de láser medidores de distancia cuyo rayo móvil mide una línea o incluso una superficie.
Si la resolución de la telemetría debe alcanzar una precisión en el rango de algunas decenas de milímetros, el tiempo de propagación de la luz tiene que ser determinado entonces exactamente dentro de un orden de magnitud de centenares de picosegundos. Para conseguir una resolución de distancia de un milímetro, se tienen que captar seis picosegundos por vía metrotécnica. Esta precisión se puede materializar con sistemas convencionales solamente con una electrónica muy costosa.
Los módulos más baratos, tales como los FPGAs (Field Programmable Gate Array = agrupación ordenada de puertas programables de campo) y otros módulos lógicos digitales programables, tienen típicamente frecuencias de trabajo en el rango de algunos centenares de MHz. Se pueden resolver así nanosegundos, pero no picosegundos.
Un recurso convencional consiste en digitalizar el impulso luminoso recibido con la frecuencia de exploración disponible y determinar entonces por interpolación de la forma de impulso de recepción esperada la posición y, por tanto, el instante de recepción, también con una mejor resolución que la que prefija la frecuencia de exploración. Sin embargo, esto está limitado en su precisión y es relativamente intensivo en cálculo debido a la interpolación.
Se conoce por el documento DE 10 2007 013 714 A1 el recurso de esquivar la granulación prefijada por la trama de exploración desplazando el instante de emisión. Se realiza para ello en un primer paso una regulación basta del instante de emisión en la trama de exploración hasta que una condición de transición del impulso de recepción está situada en la zona de un punto de trama temporalmente inmovilizado, y a continuación se realiza una regulación fina del instante de emisión hasta que el primer paso por cero de la señal de recepción esté situado sobre el punto de la trama. El retardo necesario del instante de emisión es entonces un valor de medida del tiempo de propagación de la luz. En una forma de realización preferida como palpador se realiza este procedimiento solamente antes del funcionamiento propiamente dicho en una fase de aprendizaje. En funcionamiento, se vigila si el paso por cero está situado por delante o por detrás del punto de trama aprendido. Se puede derivar un evento de conmutación a partir de esta información.
Este sistema convencional tiene algunas desventajas para la realización de una telemetría sin función de palpación o de conmutación. En primer lugar, la regulación basta puede emitir una ventana de medida falsa en la que, por ejemplo, un evento de ruido se asemeja solamente al impulso de recepción, o en la que está situado un reflejo proveniente, por ejemplo, de una luna frontal que no deberá ser medido en absoluto. Justamente por eso, el sistema no puede ocuparse de situaciones dinámicas: Si se mueve el objetivo, no se cumple ya la condición de transición. Sin embargo, no se realiza entonces una corrección o una nueva elevación del valor de medida. El sistema perdería también mucho tiempo para poder sobre todo ajustarse a un nuevo objetivo con su procedimiento relativamente complicado, incluso aunque, por ejemplo, se pulsara el botón de enseñanza para realizar una adaptación a la situación modificada.
Por tanto, el problema de la invención consiste en indicar una telemetría según el principio del tiempo de propagación de la luz que pueda utilizarse también en situaciones dinámicas.
Este problema se resuelve por medio de un sensor optoelectrónico según la reivindicación 1 y un procedimiento para la medición de distancias según el principio del tiempo de propagación de la luz con arreglo a la reivindicación 12.
La solución según la invención parte del principio de no considerar una medición como un proceso de una sola vez en el que se determina y emite el valor de medida, por ejemplo como ocurre en el estado de la técnica anteriormente descrito, sin que el sensor siga entonces manteniéndose activo. En vez de esto, se utiliza de manera continua la información actualmente disponible para mantener actualizado el resultado de medida.
La invención tiene la ventaja de que está disponible siempre un valor de medida exacto y válido, ya que la regulación reajusta siempre la medición. Se evitan errores por ruido o dinámica en la zona de vigilancia. El regulador trabaja sin umbral. Incluso para una medición única sin regulación subsiguiente sería superior este modo de proceder, ya que el algoritmo de regulación localiza el valor de medida en un tiempo mucho más corto que en el caso de un entrelazamiento de intervalos o un desplazamiento secuencial, tal como esto se revela en el documento DE 10 2007 013 714 A1. Si el regulador está estabilizado en oscilación dentro de unos pocos ciclos, se dispone entonces de un valor de telemetría exacto desde este instante durante el tiempo de retardo de emisión necesario. Ya durante la estabilización de oscilación se determina una aproximación que suministra entonces, debido a la regulación, un valor de medida cada vez más exacto.
Por consiguiente, se regula a un instante de observación fijo con relación al instante de emisión, cuya elección es ampliamente arbitraria, pero que se prefija con independencia de la medición. El instante de observación se mantiene siempre el mismo, aun cuando la invención no prohíba en principio que se le cambie. Para la regulación tiene que ser solamente conocido este instante de observación, el cual no es modificado por la regulación y no influye sobre la regulación, siempre que dicho instante se elija solamente como admisible. Por ejemplo, el instante de observación se coloca sobre la distancia de medida máxima, sobre el extremo de un intervalo de medida poco antes de la emisión de la siguiente señal luminosa o sobre fracciones del mismo. El tiempo de observación, que es así siempre el mismo, es la suma del tiempo de retardo de emisión ajustado por el regulador, el cual es la magnitud de control para el regulador, y el tiempo de propagación de la luz, de modo que este último puede ser sencillo de determinar. Las porciones de tiempo constantes, tales como los tiempos de propagación de señales eléctricas, se eliminan óptimamente de antemano por medio de calibrado.
La unidad de evaluación está concebida preferiblemente para desencadenar la emisión de una señal luminosa en un respectivo periodo de medida, en un instante de emisión prefijado por el regulador a través del tiempo de retardo de emisión, y explorar la señal luminosa recibida y acumular en un gran número de periodos de medida un histograma de señales...
Reivindicaciones:
1. Sensor optoelectrónico (10) para medir distancias según el principio de propagación de la luz, que comprende un emisor de luz (12) para emitir una señal luminosa, un receptor de luz (16) para recibir una señal de recepción remitida o reflejada, y una unidad de evaluación (18) que está concebida para satisfacer una condición de transición para la señal de recepción por elección sistemática de un tiempo de retardo de emisión para emitir la señal luminosa en un instante de observación y para calcular el tiempo de propagación de la luz a partir del tiempo de retardo de emisión necesario para ello, caracterizado porque está previsto un regulador (44) que está concebido para reconocer si el instante de recepción de la señal de recepción coincide con el instante de observación, y para reajustar el tiempo de retardo de emisión en un bucle de realimentación de modo que se cumpla la condición de transición en el instante de observación.
2. Sensor (10) según la reivindicación 1, en el que la unidad de evaluación
(18) está concebida para desencadenar, en un respectivo periodo de medida (100), la emisión de una señal luminosa en un instante de emisión prefijado por el regulador (44) a través del tiempo de retardo de emisión, y para explorar la señal luminosa recibida, así como para acumular a lo largo de un gran número de periodos de tiempo (100) un histograma (110) de señales luminosas recibidas de esta manera para determinar el instante de recepción a partir del histograma
(110) y el tiempo de propagación de la luz a partir de dicho instante de recepción, y en el que se efectúa en el histograma (110) la comprobación de la condición de transición para la señal de recepción.
3. Sensor (10) según la reivindicación 1 ó 2, en el que está previsto un elemento de filtro (32) en la vía de recepción entre el receptor de luz (16) y la unidad de evaluación (18) para convertir la señal de recepción unipolar en una señal bipolar, y en el que la condición de transición comprende especialmente un paso por cero de un primer máximo a un primer mínimo de la señal bipolar.
4. Sensor (10) según cualquiera de las reivindicaciones anteriores, en el que el intervalo de regulación (101) dentro del cual el regulador (44) puede comprobar la condición de transición y reajustar el retardo de emisión, corresponde solamente a una zona parcial de un campo de medida del sensor (10), y en el que está prevista una unidad (44) de vigilancia del cambio de posición para comprobar periódicamente el instante en que se recibe la señal de recepción y, en caso de que este instante esté fuera del intervalo de regulación (101), prefijar un
nuevo intervalo de tiempo de regulación (101) para el regulador (44).
5. Sensor (10) según la reivindicación 4, en el que la unidad (44) de vigilancia del cambio de posición está concebida para reconocer la señal de recepción con ayuda de una signatura, especialmente un cambio alternativo de máximos a mínimos, y viceversa, que forman en cada caso una curva envolvente descendente, en particular logarítmica.
6. Sensor (10) según la reivindicación 4 ó 5, en el que la unidad (44) de vigilancia del cambio de posición está concebida para almacenar un historial referente al intervalo de tiempo de regulación (101) que ella había prefijado en cada caso para el regulador (44) durante la comprobación periódica, a fin de prefijar para el regulador (44) el intervalo de tiempo de regulación (101) que, según una evaluación estadística de este historial, es el de la señal de recepción.
7. Sensor (10) según cualquiera de las reivindicaciones 4 a 6, en el que la unidad (44) de vigilancia del cambio de posición presenta un agente, es decir, un proceso activo continuamente o en segmentos de tiempo asignados regulares e independiente del regulador (44), teniendo el agente el objetivo de localizar y prefijar para el regulador (44) un intervalo de tiempo de regulación válido (101) en el que se recibe realmente la señal luminosa.
8. Sensor (10) según cualquiera de las reivindicaciones anteriores, en el que la unidad de evaluación (18) está concebida para poner a disposición del regulador (44) unos retardos del tiempo de emisión que corresponden a un múltiplo de un periodo de exploración para la señal de recepción.
9. Sensor (10) según cualquiera de las reivindicaciones anteriores, en el que está prevista una unidad de base de tiempo (38) que presenta un DDS o que está concebida para derivar retardos del tiempo de emisión de una primera cadencia de tiempo con una primera frecuencia (f1) y de una segunda cadencia de tiempo con una segunda frecuencia (f2) distinta de la primera frecuencia (f1) y poner así a disposición del regulador (44) unos retardos del tiempo de emisión con una resolución temporal proporcionada por el periodo de diferencia perteneciente a las frecuencias primera y segunda (f1, f2).
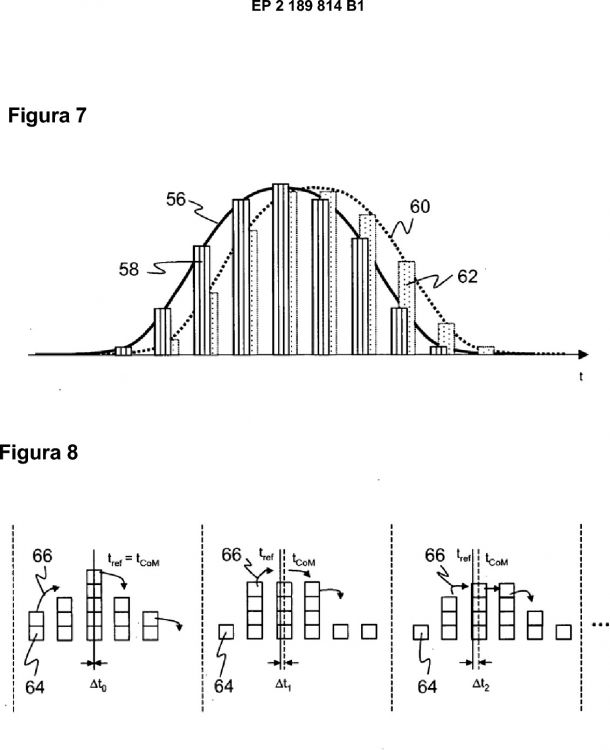
10. Sensor (10) según cualquiera de las reivindicaciones anteriores, en el que está prevista una unidad (40) de ajuste fino del tiempo de emisión que está concebida para desplazar el respectivo instante de emisión dentro de los periodos de medida (100) en la cuantía de un decalaje y en el que los decalajes forman una distribución (56, 60) cuyo centro de gravedad forma un instante de emisión deseado y que puede elegirse con una resolución temporal que sea mejor que tanto el periodo de exploración como el periodo de diferencia, especialmente con una resolución temporal de menos de diez picosegundos o incluso menos de un picosegundos.
11. Sensor (10) según la reivindicación 10, en el que la distribución (56, 60) de los decalajes es unimodal, estando prefijada especialmente según una función triangular, parabólica o gaussiana, y en el que está prevista una memoria en la que está depositada para la unidad (40) de ajuste fino del tiempo de emisión una tabla que contiene para un gran número de incrementos de tiempo una distribución de decalajes correspondiente, especialmente una respectiva distribución de decalajes para incrementos de tiempo uniformemente distribuidos.
12. Procedimiento para medir distancias según el principio de propagación de la luz, en el que se emite una señal luminosa y se recibe la señal luminosa remitida o reflejada, y en el que se cumple una condición de transición para la señal de recepción por elección sistemática de un tiempo de retardo de emisión para la emisión de la señal luminosa en un instante de observación y se calcula el tiempo de propagación de la luz a partir del tiempo de retardo de emisión necesario para ello, caracterizado porque se reajusta el tiempo de retardo de emisión por medio de una regulación (44) en un bucle de realimentación de modo que se cumpla la condición de transición en el instante de observación y, por tanto, un instante de recepción de la señal de recepción coincida con el instante de observación.
13. Procedimiento según la reivindicación 12, en el que un intervalo de tiempo de regulación (101), dentro del cual la regulación (44) puede comprobar la condición de transición y puede reajustar el tiempo de emisión, corresponde solamente a una zona parcial de un campo de medida del sensor (10), y en el que se comprueba periódicamente el instante en el que se recibe la señal de recepción y, en caso de que este instante esté fuera del intervalo de tiempo de regulación (101), se prefija para el regulador (44) un nuevo intervalo de tiempo de regulación (101).
14. Procedimiento según la reivindicación 12 ó 13, en el que se almacena un historial referente al intervalo de tiempo de regulación (101) que habría que prefijar en cada caso para la regulación (44) durante una comprobación periódica a fin de prefijar para la regulación (44) el intervalo de tiempo de regulación (101) que, según una evaluación estadística de este historial, es el de la señal de recepción.
15. Procedimiento según cualquiera de las reivindicaciones 12 a 14, en el que se realiza la comprobación periódica por medio de un agente, es decir, un proceso activo continuamente o en segmentos de tiempo asignados regulares e independiente de la regulación (44), teniendo el agente el objetivo de localizar y prefijar para la regulación (44) un intervalo de tiempo de regulación (101) en el que se recibe la señal luminosa.
Patentes similares o relacionadas:
MÉTODO Y DISPOSITIVO DE DETECCIÓN DE PICO DEL HISTOGRAMA COMPRIMIDO DE LOS VALORES DE PÍXEL EN SENSORES DE TIEMPO-DE-VUELO DE ALTA RESOLUCIÓN, del 12 de Marzo de 2020, de CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS: Se describe en este documento método para la detección del pico del histograma comprimido de los valores de píxel en sensores de tiempo-de-vuelo […]
Dispositivo para la determinación del nivel de llenado de tubos de monedas, del 6 de Noviembre de 2019, de Crane Payment Innovations Ltd: Dispositivo para la determinación del nivel de llenado de al menos un tubo de monedas que se puede llenar con monedas, que comprende al menos un emisor de rayos ópticos […]
Método para procesar pulsos de eco de un sensor láser 3d activo para proporcionar mediciones de distancia, del 24 de Julio de 2019, de HENSOLDT Sensors GmbH: Un método para procesar pulsos de eco de un sensor 3D activo para proporcionar mediciones de distancia del entorno frente al sensor, que comprende las siguientes […]
Lidar impulsado con amplificador óptico con semiconductor, del 27 de Junio de 2019, de Leosphere: Lidar impulsado que comprende: • un laser principal apto para generar un haz de laser principal (Fm), • un generador de impulsos […]
Concepto para la medición óptica de la distancia, del 19 de Junio de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Estructura de píxel para la medición óptica de la distancia con las siguientes características: un sustrato semiconductor; […]
Sistema de seguimiento dinámico y método de guiado automático basado en cámaras 3D de tiempo de vuelo, del 3 de Abril de 2019, de Terabee S.A.S: Un sistema [Fig. 1, ] de seguimiento dinámico que comprende: - una cámara [Fig. 1, ] tridimensional basada en tecnología de tiempo […]
Sensor mejorado de telémetro de láser, del 8 de Noviembre de 2017, de OSI Optoelectronics: Un sistema para determinar la forma tridimensional de un vehículo , comprendiendo el sistema: un sensor de distancia que comprende un transmisor de […]
Procedimiento de adquisición de las coordenadas de un punto de activación de un proyectil y sistema de dirección de tiro que pone en práctica tal procedimiento, del 17 de Mayo de 2017, de NEXTER SYSTEMS: Procedimiento de adquisición de las coordenadas de un punto de activación (P) de un proyectil o de una ráfaga de proyectiles en trayectoria y […]