PROCEDIMIENTO DE REGULACION Y DISPOSITIVO DE REGULACION CON RETROALIMENTACION MULTICANAL.
- Procedimiento de regulación que comprende los pasos:
- establecimiento de una primera magnitud de retroalimentación (r1),
- establecimiento de una primera desviación de regulación (e1) mediante una comparación de la primera magnitud de retroalimentación (r1) con una magnitud de guiado (w),
- formación de una primera magnitud de salida de regulador individual (m1) a partir de la primera desviación de regulación (e1) con ayuda de un primer regulador (31),
- establecimiento de una segunda magnitud de retroalimentación (r2),
- establecimiento de una segunda desviación de regulación (e2) mediante una comparación de la segunda magnitud de retroalimentación (r2) con la magnitud de guiado (w),
- formación de una segunda magnitud de salida de regulador individual (m2) a partir de la segunda desviación de regulación (e2) con ayuda de un segundo regulador (32),
- formación de una magnitud de salida de regulador (m) a partir de las dos magnitudes de salida de regulador individual (m1, m2), y
- utilización de la magnitud de salida de regulador (m) para ajustar la magnitud de regulación (x), de tal modo que la magnitud de regulación (x) sigue la magnitud de guiado (w),
caracterizado porque
la primera magnitud de retroalimentación (r1) se establece mediante la exploración de una magnitud de regulación (x) con una frecuencia de exploración (fA), en donde el valor real (xist) de la magnitud de regulación (x) se detecta en cada caso en un momento (t1, t2, t3, t4) determinado por la frecuencia de exploración (fA), y la segunda magnitud de retroalimentación (r2) mediante el promediado de la magnitud de regulación (x), en donde el valor real (xist) de la magnitud de regulación (x) se detecta durante un periodo de tiempo (Ts) y a partir del mismo se forma un valor medio (xint)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/058948.
Solicitante: BECKHOFF AUTOMATION GMBH.
Nacionalidad solicitante: Alemania.
Dirección: EISERSTRASSE 5,33415 VERL.
Inventor/es: KRAH,JENS ONNO.
Fecha de Publicación: .
Fecha Concesión Europea: 21 de Julio de 2010.
Clasificación Internacional de Patentes:
- G05B11/28 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 11/00 Controladores automáticos (G05B 13/00 tiene prioridad). › que utilizan la modulación de altura de impulsos; que utilizan la modulación de ancho de impulsos.
- G05B11/42 G05B 11/00 […] › para obtener una característica a la vez proporcional y dependiente del tiempo, p. ej. P.I., P.I.D.
- G05B21/02 G05B […] › G05B 21/00 Sistemas que implican el muestreo de la variable controlada (G05B 13/00 - G05B 19/00 tienen prioridad; sistemas de transmisión de señales en sí G08C; conmutación o abertura de puerta electrónica H03K 17/00). › eléctricas.
Clasificación PCT:
- G05B11/28 G05B 11/00 […] › que utilizan la modulación de altura de impulsos; que utilizan la modulación de ancho de impulsos.
- G05B11/42 G05B 11/00 […] › para obtener una característica a la vez proporcional y dependiente del tiempo, p. ej. P.I., P.I.D.
- G05B21/02 G05B 21/00 […] › eléctricas.
- G05F1/70 G05 […] › G05F SISTEMAS DE REGULACION DE VARIABLES ELECTRICAS O MAGNETICAS (regulación de la distribución en el tiempo o de la periodicidad de impulsos en los sistemas de radar o de radionavegación G01S; regulación de la corriente o de la tensión, especialmente adaptada para su uso en relojes electrónicos G04G 19/02; sistemas que funcionan en bucle cerrado para regular variables no eléctricas por medios eléctricos G05D; control de la alimentación de energía eléctrica a los computadores digitales G06F 1/26; para obtener las características de funcionamiento deseadas de electroimanes con armadura H01F 7/18; regulación de redes de distribución de energía eléctrica H02J; regulación de la carga de baterías H02J 7/00; regulación del valor de salida de convertidores estáticos, p. ej. reguladores de conmutación, H02M; regulación del valor de salida de generadores eléctricos H02N, H02P 9/00; control de transformadores, reactancias o bobinas de choque H02P 13/00; regulación de la respuesta de frecuencia, ganancia, potencia de salida máxima, amplitud o ancho de banda de amplificadores H03G; regulación de la sintonización de circuitos resonantes H03J; control de generadores de oscilaciones o de impulsos electrónicos H03L; regulación de las características de líneas de transmisión H04B; control de fuentes eléctricas de luz H05B 39/04, H05B 41/36, H05B 45/10, H05B 45/20, H05B 47/10; control eléctrico de aparatos de rayos X H05G 1/30). › G05F 1/00 Sistemas automáticos en los que las desviaciones de una magnitud eléctrica en relación a uno o a varios valores predeterminados son detectadas a la salida y reintroducidas en un dispositivo interior al sistema para llevar el valor detectado a su valor o a sus valores predeterminados, es decir, sistemas retroactivos. › Regulación del factor de potencia; Regulación de la corriente reactiva o de la potencia reactiva.
Fragmento de la descripción:
Procedimiento de regulación y dispositivo de regulación con retroalimentación multicanal.
La invención se refiere a un procedimiento de regulación, en especial un procedimiento de regulación de corriente para cargas inductivas, como p.ej. servomotores. El comportamiento de regulación destaca por una valoración mono- o multicanal de la magnitud de regulación, con la que puede materializarse una regulación rápida y precisa. La regulación materializada de forma preferida con ayuda de la modulación por anchura de impulso presenta una elevada supresión de parásitos y al mismo tiempo una elevada anchura de banda. La invención se refiere también a un dispositivo de regulación correspondiente con una retroalimentación bi- o multicanal.
Muchos procesos técnicos exigen el mantenimiento de una magnitud de regulación en un valor nominal prefijado mediante una magnitud de guiado. Para esto se utilizan sistemas de regulación en los que la magnitud de regulación es detectada de forma continuada, comparada con la magnitud de guiado y adaptada, dependiendo de esta comparación a través de un ajuste correspondiente de una magnitud de ajuste en el sentido de una nivelación, a la magnitud de guiado. El desarrollo de actuación de aquí resultante tiene lugar en un circuito cerrado. Dependiendo de la aplicación respectiva entran en cuestión como magnitud de regulación diferentes magnitudes físicas, p.ej. presión, temperatura, número de revoluciones, velocidad, tensión, intensidad de corriente, etc. A este respecto pueden ser muy diferentes los componentes característicos para un circuito de regulación cerrado y necesarios para el desarrollo de actuación, p.ej. dispositivo de medición, comparación, regulación o ajuste según la aplicación. Aparte de unas pocas excepciones se materializan los sistemas de regulación modernos casi exclusivamente por técnica de conmutación. Esto se refiere sobre todo a sistemas de regulación complejos. El abanico de estos sistemas de regulación va a este respecto desde circuitos de regulación analógicos sencillos a reguladores digitales. Aparte de una solución por técnica de conmutación puede materializarse un algoritmo de regulación digital también en forma de un programa, que se desarrolla en un microprocesador o en un módulo programable (FP-GA). A causa del tratamiento digital de señales y la capacidad de modificación ligada al mismo, el regulador digital es especialmente adecuado para tareas de regulación más complejas, en las que se trata de conseguir una precisión especialmente elevada y parámetros reproducibles con exactitud.
En el caso de los reguladores puede diferenciarse entre otras cosas entre reguladores continuos y reguladores de exploración. Un regulador continuo normal lo representa un regulador analógico. Debido a que el algoritmo de regulación analógico puede reaccionar prácticamente sin retardos a modificaciones de la magnitud de entrada y puede aplicar una magnitud de salida correspondiente a su salida, la magnitud de entrada y la de salida de este tipo de regulador se componen, de forma característica, de señales continuas. A diferencia de esto se trata en el caso de un regulador digital de un regulador de exploración. Su función de transmisión se materializa mediante una secuencia de operaciones aritméticas, que se llevan acabo consecutivamente. A causa del tiempo de cálculo necesario para el algoritmo de regulación digital se produce un retraso de tiempo entre la detección de la magnitud de entrada y la emisión de la magnitud de salida. Debido a que durante la realización del algoritmo de regulación no tienen lugar normalmente ninguna detección y ningún cálculo renovados de la magnitud de entrada, la magnitud de regulación no se detecta continuamente, sino sólo en determinados momentos de exploración. En consecuencia la exploración digital envía señales discontinuas, discretas en el tiempo, en donde la magnitud de señal sólo se presenta en momentos discretos. El tiempo entre dos momentos de exploración consecutivos (duración de ciclo TA) determina la velocidad de exploración o la frecuencia de exploración fA. Una velocidad de exploración elevada es necesaria para poder detectar incluso porcentajes de señal de alta frecuencia de la magnitud de regulación. El límite superior de la velocidad de exploración, característico de un regulador digital, está determinado principalmente por el tiempo de cálculo necesario para el algoritmo de cálculo. De este modo depende de la velocidad de cálculo del microprocesador, microcontrolador o FPGA utilizado.
Para materializar un sistema de regulación se necesitan reguladores que presentan un comportamiento de regulación cortado según la aplicación respectiva. Para esto existe una serie de elementos de regulación sencillos, cuyas propiedades de regulación características pueden describirse en cada caso mediante funciones de transmisiones elementales. Mediante la combinación de varios de estos elementos de regulación pueden estructurarse reguladores más complejos, cuyo comportamiento de regulación puede adaptarse mejor a las prefijaciones de la aplicación respectiva.
Una combinación normal de reguladores está representada p.ej. por el regulador PI. Este tipo de regulador comprende un regulador proporcional y un regulador integral conectado al mismo en paralelo. Mientras que el elemento proporcional multiplica el valor de entrada por un factor fijo, el elemento integral realiza una integración en el tiempo parametrizable de la desviación de regulación. El regulador proporcional relativamente rápido forma a este respecto un buen complemento del regulador integral, que responde sobre todo a desviaciones de regulación de mayor permanencia. Debido a que el regulador PI reúne en sí mismo las particularidades de regulación de sus dos componentes, puede tanto reaccionar de forma relativamente rápida a modificaciones de la magnitud de regulación o guiado como llevar a cero, de forma estacionaria, pequeñas desviaciones de regulación estáticas. Un comportamiento de regulación de este tipo es deseable en muchas aplicaciones técnicas, lo que representa a veces la causa de una amplia extensión de este tipo de regulación.
Un campo de aplicación muy importante del regulador PI está representado por la regulación de corriente de accionamientos eléctricos. Estos accionamientos presentan como componente central un motor eléctrico, que como convertidor de energía transforma la energía eléctrica alimentada al mismo en energía mecánica. La energía mecánica la pone a disposición un motor rotatorio como movimiento giratorio sobre un árbol motorizado, mientras que un motor lineal pone a disposición la misma como traslación sobre un carro móvil. A este respecto se produce, en dependencia de la energía eléctrica alimentada, sobre el árbol motorizado o sobre el carro motorizado un determinado par de giro o una fuerza determinada, tras lo cual el árbol motorizado o el carro motorizado realiza un movimiento en dependencia de las contrafuerzas activas. Para controlar este movimiento, el accionamiento eléctrico presenta un dispositivo de regulación de corriente, que forma un circuito de regulación central de un control de accionamiento. Con ayuda del dispositivo de regulación de corriente, instalado de forma preferida sobre un regulador PI, se influye directamente en la corriente que fluye a través del devanado del motor y de este modo en la energía mecánica que entrega el motor eléctrico. Para dividir en partes la energía eléctrica alimentada al motor eléctrico se utiliza un dispositivo de ajuste. Con su ayuda es posible ajustar las fuerzas que actúan sobre el árbol motorizado o sobre el carro motorizado, de forma correspondiente al preajuste del regulador PI. Los dispositivos de ajuste de los modernos accionamientos eléctricos utilizan semiconductores de potencia, como p.ej. transistores de potencia, a través de los cuales puede conectarse y desconectarse la alimentación de energía eléctrica al motor.
Los accionamientos regulados por posición y en especial los servoaccionamientos usados en la fabricación industrial necesitan una regulación de corriente muy precisa, para poder controlar con precisión el par de giro o la fuerza y el movimiento del servomotor de ello resultante. Una regulación de corriente rápida y precisa es además necesaria para una elevada rigidez del accionamiento y elevados reforzamientos de circuito de un circuito de regulación del número de revoluciones superpuesto. Con ayuda de una regulación de corriente precisa pueden usarse también eficientemente controles previos. Los errores de corriente o de par de giro que pudieran producirse no tienen que...
Reivindicaciones:
1.- Procedimiento de regulación que comprende los pasos:
- establecimiento de una primera magnitud de retroalimentación (r1),
- establecimiento de una primera desviación de regulación (e1) mediante una comparación de la primera magnitud de retroalimentación (r1) con una magnitud de guiado (w),
- formación de una primera magnitud de salida de regulador individual (m1) a partir de la primera desviación de regulación (e1) con ayuda de un primer regulador (31),
- establecimiento de una segunda magnitud de retroalimentación (r2),
- establecimiento de una segunda desviación de regulación (e2) mediante una comparación de la segunda magnitud de retroalimentación (r2) con la magnitud de guiado (w),
- formación de una segunda magnitud de salida de regulador individual (m2) a partir de la segunda desviación de regulación (e2) con ayuda de un segundo regulador (32),
- formación de una magnitud de salida de regulador (m) a partir de las dos magnitudes de salida de regulador individual (m1, m2), y
- utilización de la magnitud de salida de regulador (m) para ajustar la magnitud de regulación (x), de tal modo que la magnitud de regulación (x) sigue la magnitud de guiado (w),
caracterizado porque
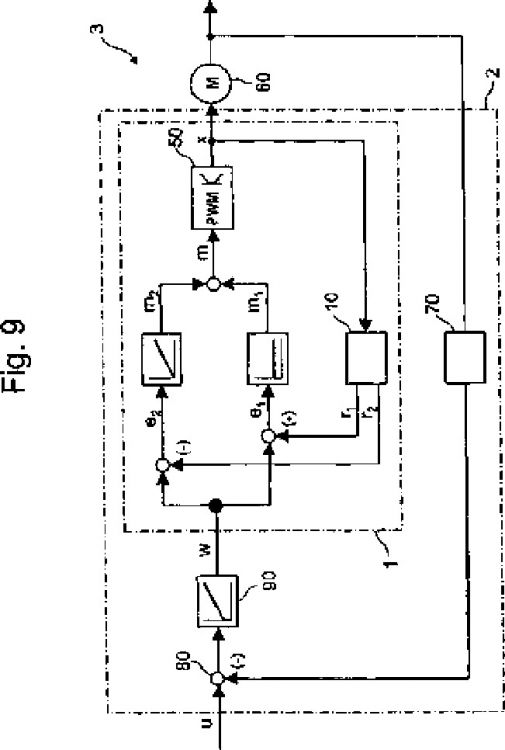
la primera magnitud de retroalimentación (r1) se establece mediante la exploración de una magnitud de regulación (x) con una frecuencia de exploración (fA), en donde el valor real (xist) de la magnitud de regulación (x) se detecta en cada caso en un momento (t1, t2, t3, t4) determinado por la frecuencia de exploración (fA), y la segunda magnitud de retroalimentación (r2) mediante el promediado de la magnitud de regulación (x), en donde el valor real (xist) de la magnitud de regulación (x) se detecta durante un periodo de tiempo (Ts) y a partir del mismo se forma un valor medio (xint).
2. Procedimiento de regulación según la reivindicación 1, caracterizado porque la magnitud de salida de regulador (m) se forma mediante la suma de las dos magnitudes de salida de regulador individual (m1, m2).
3. Procedimiento de regulación según la reivindicación 1 ó 2, caracterizado porque la segunda magnitud de retroalimentación (r2) se establece mediante una integración del valor real (Xist) de la magnitud de regulación (x) durante el periodo de tiempo (Ts).
4. Procedimiento de regulación según una de las reivindicaciones anteriores, caracterizado porque para ajustar la magnitud de regulación (x) se forma una magnitud de ajuste (y) sincronizada con una frecuencia de conmutación (fs) a partir de la magnitud de salida de regulador (m), en donde la exploración de la magnitud de regulación (x) se realiza con el doble de la frecuencia de conmutación (fs) y/o el valor medio (xint) de la magnitud de regulación (x) durante un periodo de tiempo, que se corresponde con un periodo de conmutación (Ts) prefijado mediante la frecuencia de conmutación (fs) de la magnitud de ajuste (y) o con un múltiplo entero de este periodo de conmutación (Ts).
5. Procedimiento de regulación según la reivindicación 4, caracterizado porque la exploración de la magnitud de regulación (x) se realiza sincrónicamente con una señal de sincronización, con cuya ayuda se sincroniza la magnitud de ajuste (y).
6. Procedimiento de regulación según una de las reivindicaciones anteriores, caracterizado porque la exploración se realiza en cada caso en un momento sin oscilación superior de la magnitud de regulación (x).
7. Dispositivo de regulación que comprende:
- un dispositivo de medición (10) que está configurado para establecer una primera magnitud de retroalimentación (r1) y una segunda magnitud de retroalimentación (r2),
- un dispositivo de comparación (20) con un primer y un segundo elemento de comparación (21, 22), en donde el primer elemento de comparación (21) está configurado para formar una primera desviación de regulación (e1) mediante una comparación de la primera magnitud de retroalimentación (r1) con una magnitud de guiado (w), y en donde el segundo elemento de comparación (22) está configurado para formar una segunda desviación de regulación (e2) mediante una comparación de la segunda magnitud de retroalimentación (r2) con la magnitud de guiado (w),
- un dispositivo de regulación (30) con un primer y un segundo regulador (31, 32), en donde el primer regulador (31) está configurado para formar una primera magnitud de salida de regulador individual (m1) a partir de la primera desviación de regulación (e1), y en donde el segundo regulador (32) está configurado para formar una segunda magnitud de salida de regulador individual (m2) a partir de la segunda desviación de regulación (e2),
- un dispositivo sumador (40) que está configurada para formar una magnitud de salida de regulador (m) a partir de las dos magnitudes de salida de regulador individual (m1, m2), y
- un dispositivo de ajuste (50), que está configurado para ajustar la magnitud de regulación (x) con ayuda de la magnitud de salida de regulador (m), de tal modo que la magnitud de regulación (x) sigue la magnitud de guiado (w),
caracterizado porque el dispositivo de medición (10) está configurado para establecer la primera magnitud de retroalimentación (r1) mediante la exploración de una magnitud de regulación (x) con una frecuencia de exploración (fA), en donde el valor real (xist) de la magnitud de regulación (x) se detecta en cada caso en un momento (t1, t2, t3, t4) determinado por la frecuencia de exploración (fA), y la segunda magnitud de retroalimentación (r2) mediante el promediado de la magnitud de regulación (x), en donde el valor real (xist) de la magnitud de regulación (x) se detecta durante un periodo de tiempo (Ts) y a partir del mismo se forma un valor medio (xint).
8. Dispositivo de regulación según la reivindicación 7, caracterizado porque el primer regulador (31) es un regulador proporcional y/o el segundo regulador (32) es un regulador integral.
9. Dispositivo de regulación según la reivindicación 7 u 8, caracterizado porque el dispositivo de medición (10) comprende un dispositivo de integración (12), para formar el valor real promediado (xist) mediante una integración de la magnitud de regulación (x) durante el periodo de tiempo (Ts).
10. Dispositivo de regulación según una de las reivindicaciones anteriores, caracterizado porque el dispositivo de ajuste (50) presenta un modulador de anchura de impulso (51), para sincronizar la magnitud de ajuste (y).
11. Dispositivo de regulación según una de las reivindicaciones anteriores, caracterizado porque el dispositivo de regulación (30) está configurado como un regulador digital.
12. Dispositivo de regulación según la reivindicación 11, caracterizado porque el dispositivo de medición (10) para digitalizar señales analógicas presenta un modulador delta-sigma (13), y el dispositivo de integración (12) y/o un dispositivo de exploración (11) del dispositivo de medición (10) están implementados como algoritmos en un módulo de semiconductor programable.
13. Dispositivo de regulación según una de las reivindicaciones anteriores, caracterizado porque el dispositivo de regulación (1) está configurado como regulador de corriente de una carga (60) y forma parte de un circuito de regulación del número de revoluciones (2) superior, cuya magnitud de ajuste forma sola o en combinación con una magnitud de control previo la magnitud de guiado (w) del dispositivo de regulación (1).
14. Dispositivo de regulación según la reivindicación 13, caracterizado porque el dispositivo de regulación (1) está configurado para regular la corriente de un motor de corriente trifásica (60) en un sistema de coordenadas fijado al estator, en donde dependiendo del sistema de coordenadas de estator utilizado están previstos dos o más dispositivos de medición (10', 10'') y dos o más dispositivos de regulación (20', 20''), para detectar y regular diferentes componentes de corriente (ia, ib, ic, ia, iß) del respectivo sistema de coordenadas de estator, independientemente entre ellos.
15. Dispositivo de regulación según la reivindicación 13, caracterizado porque el dispositivo de regulación (1) está configurado para regular la corriente de un motor de corriente trifásica (60) en un sistema de coordenadas orientado por campo, en donde para cada componente de corriente (iq, id) del sistema de coordenadas orientado por campo está prevista su propio dispositivo de regulación (20', 20''), y en donde están previstos dos o más dispositivos de medición (10', 10''), para detectar las dos componentes de corriente (iq, id,) del sistema de coordenadas orientado por campo o las tres componentes de corriente (ia, ib, ic), del motor de corriente trifásica (60), independientemente entre ellos.
Patentes similares o relacionadas:
Sistema de control del proceso de regulación y control de una planta de estructura modular para la producción de productos biofarmacéuticos y biológicos macromoleculares, del 18 de Septiembre de 2019, de BAYER AKTIENGESELLSCHAFT: Procedimiento implementado en ordenador para el control del proceso de una planta de producción para la fabricación y/o el tratamiento continuo de productos biofarmacéuticos […]
Aparato eléctrico para cocinar y/o calentar alimentos, del 3 de Mayo de 2019, de De' Longhi Appliances S.r.l. Con Unico Socio: Aparato eléctrico para cocinar y/o calentar alimentos, que comprende al menos: - una cámara capaz de recibir alimentos para cocinar y/o calentar, - elementos de […]
Dispositivo de control, del 1 de Mayo de 2019, de DAIKIN INDUSTRIES, LTD.: Un dispositivo de control que emite a un sistema a controlar que opera en base a una entrada de control (Vid, Viq) y a partir de la cual se obtiene una […]
Sistema de control de excitación digital para un generador eléctrico y un procedimiento de uso asociado, del 20 de Diciembre de 2017, de Basler Electric Company: Un sistema de autoajuste de un controlador PID utilizado con un excitador con un voltaje de campo del excitador conectado eléctricamente a un regulador de […]
Método de control de una máquina con actuación redundante paralela, dispositivo de control asociado y máquina, del 1 de Febrero de 2017, de CENTRE NATIONAL DE LA RECHERCHE SCIENTIFIQUE (C.N.R.S.): Un método para controlar una máquina que comprende: - un marco , - un elemento móvil accionado en relación con dicho marco […]
Procedimiento para corregir registros en una máquina de mecanización y máquina de mecanización, del 28 de Diciembre de 2016, de ROBERT BOSCH GMBH: Procedimiento para corregir registros longitudinales en una máquina de mecanización sin árbol para mecanizar una pista de mercancías , en particular una máquina […]
Procedimiento y sistema para un conmutador de control PID sin perturbaciones, del 3 de Abril de 2013, de GE INTELLIGENT PLATFORMS, INC. (100.0%): Un procedimiento para conmutar de un primer algoritmo de control a un segundo algoritmo de control en unsistema de control continuo de procesos, comprendiendo dicho […]
 MÉTODO Y APARATO DE CONTROL DE SISTEMA DE ENERGÍA ALTERNATIVA, del 18 de Marzo de 2011, de SQUARE D COMPANY: Un método para controlar un sistema de energía alternativa multivariable con una pluralidad de modos en el que el sistema se configura para funcionar […]
MÉTODO Y APARATO DE CONTROL DE SISTEMA DE ENERGÍA ALTERNATIVA, del 18 de Marzo de 2011, de SQUARE D COMPANY: Un método para controlar un sistema de energía alternativa multivariable con una pluralidad de modos en el que el sistema se configura para funcionar […]