MAQUINA DE EMBALAJE CON UN SISTEMA DE PINZA.
Máquina de embalaje (1) con una superficie de trabajo (200, 300a,
400) para envases y un sistema de pinza (2), presentando el sistema de pinza (2):
una pinza (3a, 3b, 3c) que realiza un movimiento para sujetar por ambos lados un envase o varios envases dispuestos sobre la superficie de trabajo (200, 300a, 400);
un primer dispositivo de accionamiento (4a, 4b) que genera un par de giro para el movimiento de la pinza (3a, 3b, 3c);
un segundo dispositivo de accionamiento (5a, 5b, 5c) que aplica una fuerza a la pinza (3a, 3b, 3c); y
un dispositivo de guiado (6a, 6b) que guía la pinza (3a, 3b, 3c) desplazada por la fuerza linealmente sobre la superficie de trabajo (200, 300a, 400) y, adicionalmente, aplica el par de giro generado por el primer dispositivo de accionamiento (4a, 4b) a la pinza (3a, 3b, 3c);
en la que la pinza presenta un carro (3a) que es guiado linealmente por el dispositivo de guiado (6a, 6b) y, como mínimo, un brazo robot (3b) con capacidad de giro en relación con el carro (3a), sobre el que se aplica el par de giro para el movimiento de la pinza (3a, 3b, 3c)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09163636.
Solicitante: MULTIVAC SEPP HAGGENMULLER GMBH & CO. KG.
Nacionalidad solicitante: Alemania.
Dirección: BAHNHOFSTRASSE 4,87787 WOLFERTSCHWENDEN.
Inventor/es: WAGNER,CHRISTOPH, ICKERT,LARS, VINE,LEE MICHAEL.
Fecha de Publicación: .
Fecha Solicitud PCT: 24 de Junio de 2009.
Fecha Concesión Europea: 28 de Julio de 2010.
Clasificación Internacional de Patentes:
- B65B43/46 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 43/00 Formación, alimentación, abertura o montaje de receptáculos o recipientes, en unión con el embalaje (formación de bolsas en las hojas, los elementos de envoltura o en las bandas, presionando el material en las matrices o desplazándolo sobre matrices de plegado B65B 47/00). › sirviéndose de zarpas.
- B65B7/16B
- B65G25/02 B65 […] › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 25/00 Transportadores que tienen portacargas o un impulsor de movimientos cíclicos, p.ej. de vaivén, que se desprende de la carga durante el movimiento de retorno (de sacudidas B65G 27/00). › teniendo el portacargas o el impulsor caminos de ida y vuelta diferentes, p. ej. transportadores de balancín.
Clasificación PCT:
- B21D43/05 B […] › B21 TRABAJO MECANICO DE LOS METALES SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DEL METAL POR PUNZONADO. › B21D TRABAJO MECANICO O TRATAMIENTO DE CHAPAS, TUBOS, BARRAS O PERFILES METALICOS SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DE METALES POR PUNZONADO (trabajo mecánico o tratamiento de alambre B21F). › B21D 43/00 Dispositivos de alimentación, de alineamiento o de almacenado combinados con aparatos para trabajar o tratar la chapa, tubos o perfiles, dispuestos en estos aparatos o especialmente adaptados para ser utilizados en asociación con estos aparatos; Asociación de dispositivos de corte con estos aparatos (dispositivos de corte asociados a las herramientas, ver los grupos previstos para estas herramientas). › especialmente adaptados a las prensas de fases múltiples.
- B65B7/16 B65B […] › B65B 7/00 Cierre de los receptáculos o recipientes después del llenado. › Cierre de receptáculos o recipientes semirrígidos o rígidos, no deformados por el contenido o que no toman su forma, p. ej. cajas o cartones.
- B65G25/02 B65G 25/00 […] › teniendo el portacargas o el impulsor caminos de ida y vuelta diferentes, p. ej. transportadores de balancín.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia.
Fragmento de la descripción:
Máquina de embalaje con un sistema de pinza.
La presente invención se refiere a una máquina de embalaje con una superficie de trabajo para envases y un sistema de pinza que recoge desde arriba un envase o varios envases dispuestos sobre la superficie de trabajo sujetándolos por ambos lados y, en especial, se refiere a una máquina para el cierre de bandejas, una máquina de campana o una termoformadora.
Por la patente EP-0 334 226 A1 se conoce una máquina de embalaje que dispone de una pinza. Esta máquina de embalaje tiene un sistema de pinza con una pinza que recoge los envases y los desplaza lateralmente. El sistema de pinza dispone de un árbol de torsión y un árbol hueco que está encajado encima del árbol de torsión. Entre el árbol hueco y el árbol de torsión están dispuestos un manguito y un casquillo que pueden girar relativamente entre sí pero no pueden desplazarse axialmente entre sí. El árbol de torsión dispone de un resorte que se extiende axialmente, y el casquillo presenta una ranura adaptada a éste que también se extiende axialmente. El árbol de torsión y el árbol hueco pueden ser desplazados axialmente entre sí mediante el encaje de ranura y lengüeta, pero no pueden ser girados uno hacia el otro. Un dispositivo de accionamiento transmite el par de giro del árbol de torsión al árbol hueco a través de la ranura y la lengüeta. El sistema de pinza posee, además, una combinación de cojinete axial y radial, que guía el árbol hueco de forma axialmente desplazable y, además, lo apoya permitiendo que gire libremente. La mecánica de accionamiento se realiza por medio de diferentes mecanismos de manivela que son libremente accesibles en la máquina.
Dado que en el ámbito de la ingeniería alimentaria las máquinas de embalaje han de cumplir unas normas estrictas de higiene, toda la mecánica de accionamiento y/o la zona de la pinza han de ser limpiadas regularmente. Por lo tanto, se necesita una máquina de embalaje con una mecánica de accionamiento sencilla y fácil de limpiar.
El objetivo de la presente invención es dar a conocer una máquina de embalaje que presente una mecánica de accionamiento simplificada e higiénica.
Este objetivo se consigue mediante una máquina de embalaje con las características de la reivindicación 1. Realizaciones ventajosas son objeto de las reivindicaciones dependientes.
De modo ventajoso, el dispositivo de guiado tiene una doble función, guiando no solamente la pinza linealmente por encima de la superficie de trabajo, sino aplicando adicionalmente el par de giro a la pinza. De esta manera se obtiene una mecánica de accionamiento simple que consta de pocas piezas.
Preferentemente, la pinza tiene un carro que está guiado linealmente por el dispositivo de guiado y, como mínimo, un brazo robot con capacidad de giro relativo con respecto al carro sobre el que se aplica el par de giro para el movimiento de la pinza. El carro está guiado preferentemente por el dispositivo de guiado en forma de dos ejes de sección transversal no circular, dispuestas paralelamente, que encajan de forma deslizante en el carro. Los ejes dispuestos en paralelo encajan, además, mediante sus secciones no circulares con sendos brazos robot, a efectos de aplicar el par de giro sobre dichos brazos robot. De esta manera los ejes paralelos con su sección no circular cumplen no solamente la función de guiar linealmente el carro, sino también la de aplicar el par de giro a los brazos robot.
Preferentemente, dos motores de accionamiento están dispuestos en los extremos de los ejes paralelos y éstos son accionados de manera que giran en sentidos opuestos entre sí. Debido a ello, la parte más grande y más delicada de la mecánica de accionamiento, incluido el motor, puede ser trasladada de modo ventajoso a un espacio cerrado al final de los ejes paralelos. De esta manera, se garantiza una óptima limpieza y todos los cables y tubos se encuentran ahora en este espacio cerrado.
Preferentemente, la pinza puede ser desplazada mediante un accionamiento por correa que consta de dos poleas y una correa o, más preferentemente, por un accionamiento de correa dentada a lo largo de la superficie de trabajo. Alternativamente también se puede utilizar un accionamiento lineal cualquiera tal como, por ejemplo, un mecanismo de rosca trapezoidal, un accionamiento de husillo, un motor lineal, un cilindro electromecánico (por ejemplo, un motor eléctrico con accionamiento de husillo), un cilindro neumático, un cilindro hidráulico, un accionamiento por cremallera, un accionamiento por cadena o un mecanismo de biela tipo "scotch-yoke".
Como accionamiento de husillo se puede utilizar un accionamiento de rosca esférica (husillo a bolas recirculantes), un accionamiento por husillo de rodillos con retorno de rodillos, un accionamiento por husillo de rodillos planetarios, un mecanismo de rosca trapezoidal, un accionamiento por rosca de paso empinado o un accionamiento de rosca hidrostáti-co.
Otras características y ventajas de la presente invención se desprenden de la siguiente descripción de los dibujos.
Éstos muestran:
En la figura 1, una máquina para el cierre de bandejas, según un ejemplo de realización de la invención, en una vista esquemática en perspectiva;
En la figura 2, un sistema de pinza de la máquina para el cierre de bandejas con los brazos robot abiertos, en una primera posición, según el ejemplo de realización de la invención, en una vista esquemática en perspectiva;
En la figura 3, el sistema de pinza de la máquina para el cierre de bandejas con los brazos robot cerrados en la primera posición, según el ejemplo de realización de la invención, en una vista esquemática en perspectiva;
En la figura 4, el sistema de pinza de la máquina para el cierre de bandejas con los brazos robot cerrados en una segunda posición, según el ejemplo de realización de la invención, en una vista esquemática en perspectiva; y
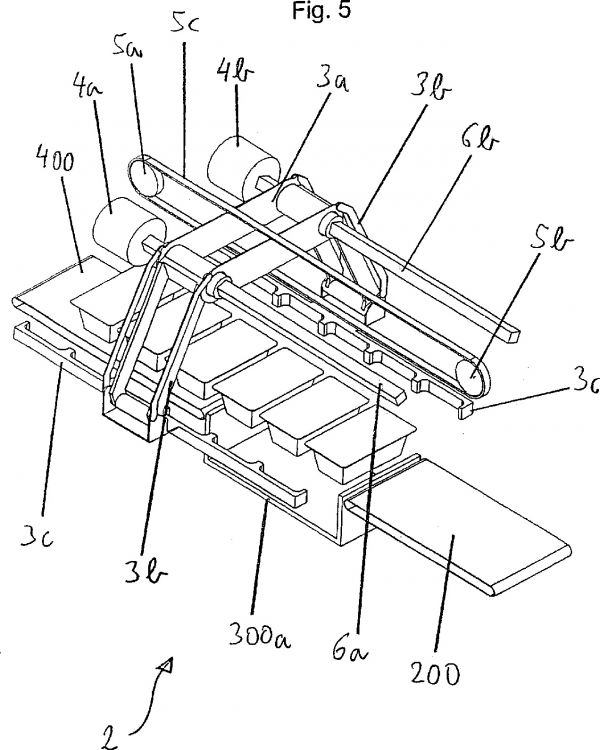
En la figura 5, el sistema de pinza de la máquina para el cierre de bandejas con los brazos robot abiertos en la segunda posición, según el ejemplo de realización de la invención, en una vista esquemática en perspectiva.
A continuación, se describirá un ejemplo de realización de la invención haciendo referencia a las figuras, en este caso, a título de ejemplo, una máquina para el cierre de bandejas también denominada "Traysealer" o máquina de cierre estanco o "sellado" de bandejas.
En la figura 1 se muestra una máquina de embalaje (1) en forma de "traysealer" con una banda de alimentación (200), una estación o varias estaciones de trabajo (300), por ejemplo, una estación de vacío, de sellado y de corte, una banda de alimentación (400), un bastidor de máquina (500), un sistema tensor de película (600), un dispositivo de mando (300), un rodillo de alimentación de película (320), un rodillo (310) para arrollar de película restante y un sistema de pinza (2).
Durante el funcionamiento, se transportan envases, por ejemplo, en forma de bandejas, sobre la banda de alimentación (200) o la banda de alimentación (400) haciendo entrar los mismos a la estación de trabajo (300) o salir de la misma. En la estación de trabajo (300) los envases son, por ejemplo, sometidos a vacío, gaseados, sellados y cortados. Una película es suministrada por el rodillo de alimentación de película (320) y guiado a través del sistema tensor de película (600). En la estación de trabajo (300) tal como, por ejemplo, la estación de sellado, el envase es sellado con la película. El resto de la película cortada se arrolla finalmente sobre el rodillo (310) para arrollar dicha película restante.
La transferencia de los envases entre la banda de alimentación (200), la estación de trabajo (300) y la banda de alimentación (400) se realiza mediante el sistema de pinza (2) que se muestra con más detalle en las figuras 2 a 5.
Entre la banda de alimentación (200) y la banda de alimentación (400) se muestra un sistema de elevación (300a) de la estación de trabajo (300). En las figuras 2 a 5 se muestra el sistema de elevación (300a) en la posición bajada, pudiendo el sistema de elevación (300a) ser elevado de tal manera que queda en un mismo plano con la banda de alimentación (200) y la banda de alimentación (400). El sistema de pinza (2) recoge los envases para transportarlos de la banda de alimentación (200) al sistema de elevación (300a) y, a continuación, una vez se ha llevado a cabo la operación en la estación de trabajo (300), del sistema de elevación (300a) a...
Reivindicaciones:
1. Máquina de embalaje (1) con una superficie de trabajo (200, 300a, 400) para envases y un sistema de pinza (2), presentando el sistema de pinza (2):
una pinza (3a, 3b, 3c) que realiza un movimiento para sujetar por ambos lados un envase o varios envases dispuestos sobre la superficie de trabajo (200, 300a, 400);
un primer dispositivo de accionamiento (4a, 4b) que genera un par de giro para el movimiento de la pinza (3a, 3b, 3c);
un segundo dispositivo de accionamiento (5a, 5b, 5c) que aplica una fuerza a la pinza (3a, 3b, 3c); y
un dispositivo de guiado (6a, 6b) que guía la pinza (3a, 3b, 3c) desplazada por la fuerza linealmente sobre la superficie de trabajo (200, 300a, 400) y, adicionalmente, aplica el par de giro generado por el primer dispositivo de accionamiento (4a, 4b) a la pinza (3a, 3b, 3c);
en la que la pinza presenta un carro (3a) que es guiado linealmente por el dispositivo de guiado (6a, 6b) y, como mínimo, un brazo robot (3b) con capacidad de giro en relación con el carro (3a), sobre el que se aplica el par de giro para el movimiento de la pinza (3a, 3b, 3c).
2. Máquina de embalaje (1), según la reivindicación 1, en la que el dispositivo de guiado (6a, 6b) presenta dos ejes paralelos (6a, 6b) con secciones transversales no circulares, que encajan de forma deslizante en el carro (3a) para guiar dicho carro (3a) linealmente y que encajan con un brazo robot (3b) respectivamente para aplicar adicionalmente el par de giro generado por el primer dispositivo de accionamiento (4a, 4b) a los brazos robot (3b).
3. Máquina de embalaje (1), según la reivindicación 2, en la que el primer dispositivo de accionamiento (4a, 4b) presenta dos motores (4a, 4b) que están dispuestos cada uno en un extremo de uno de los ejes paralelos (6a, 6b) respectivamente y son accionados de manera que giran en sentidos opuestos entre sí.
4. Máquina de embalaje (1), según una de las reivindicaciones anteriores, en la que el segundo dispositivo de accionamiento (5a, 5b, 5c) presenta un accionamiento por correa que consta de dos poleas (5a, 5b) y una correa (5c) o preferentemente un accionamiento por correa dentada, estando la pinza (3a, 3b, 3c) acoplada a la correa (5c) y siendo accionada una de las poleas (5a, 5b) de forma giratoria.
5. Máquina de embalaje (1), según una de las reivindicaciones 1 a 3, en la que el segundo dispositivo de accionamiento es un accionamiento lineal, preferentemente, un mecanismo de rosca trapezoidal, un accionamiento de husillo, un motor lineal, un cilindro electromecánico, un cilindro neumático, un cilindro hidráulico, un accionamiento por cremallera, un accionamiento por cadena o un mecanismo de biela tipo "scotch-yoke".
6. Máquina de embalaje (1), según la reivindicación 5, en la que el segundo dispositivo de accionamiento es un accionamiento por husillo, en el que la pinza (3a, 3b, 3c) encaja con un husillo y es avanzada por el giro del husillo.
7. Máquina de embalaje (1), según una de las reivindicaciones anteriores 1 a 6, en la que cada brazo robot (3b) presenta un soporte (3c) para recibir como mínimo un envase.
8. Máquina de embalaje (1), según una de las reivindicaciones anteriores, que presenta además un dispositivo de elevación que eleva y desciende el sistema de pinza (2) o sólo el brazo robot (3b).
9. Máquina de embalaje (1), según una de las reivindicaciones anteriores, en la que el guiado lineal de la pinza (3a, 3b, 3c) se lleva a cabo exclusivamente por el dispositivo de guiado (6a, 6b).
10. Máquina de embalaje (1), según una de las reivindicaciones anteriores, en la que la pinza (3a, 3b, 3c) recoge desde arriba un envase o varios envases dispuestos sobre la superficie de trabajo (200, 300a, 400) sujetándolos por ambos lados.
11. Máquina de embalaje (1), según una de las reivindicaciones anteriores, siendo dicha máquina de embalaje (1) una máquina para el cierre de bandejas, una máquina de campana o bien una termoformadora.
Patentes similares o relacionadas:
Dispositivo de avance paso a paso de piezas de trabajo, del 7 de Mayo de 2019, de Sander Automation GmbH: Dispositivo de avance paso a paso de piezas de trabajo que comprende dos carriles de agarre dispuestos paralelamente uno a otro […]
Dispositivo de transporte para un producto de transporte, del 30 de Abril de 2019, de OPTIMA consumer GmbH: Dispositivo de transporte para un producto de transporte que incluye - un rastrillo de transporte con al menos un área de alojamiento para el producto de transporte […]
Dispositivo de accionamiento para un transporte multiaxial de piezas de trabajo a través de estaciones de mecanizado consecutivas de una máquina de mecanizado, del 5 de Abril de 2019, de Schuler Pressen GmbH: Dispositivo de accionamiento para un transporte multiaxial de piezas de trabajo a través de estaciones de mecanizado consecutivas […]
Sistema con una bobina y un dispositivo de transporte para la bobina, del 21 de Junio de 2017, de AMOVA GmbH: Sistema con una bobina y un dispositivo en unas instalaciones de transporte para transferir cintas metálicas enrolladas en bobinas , en […]
Mecanismo de transporte de viales, del 30 de Diciembre de 2015, de GRIFOLS, S.A: Dispositivo para transferir un recipiente de una primera ubicación a una segunda ubicación , que comprende: una primera […]
Línea de montaje para la fabricación simultánea de núcleos dinamoeléctricos, del 18 de Marzo de 2015, de ATOP S.P.A.: Estación de trabajo para procesar de manera sustancialmente simultánea inducidos que están en diferentes fases de un proceso de fabricación de núcleos […]
Dispositivo de esparcimiento para acumulaciones de mezclas de sustancias, del 15 de Octubre de 2014, de STADLER ANLAGENBAU GMBH: Dispositivo de esparcimiento para acumulaciones de mezclas de sustancias con una zona de entrada de sustancias y una zona de salida de sustancias , en particular […]
 Dispositivo de transferencia para una prensa, del 9 de Julio de 2014, de MULLER WEINGARTEN AG: Prensa con un dispositivo de transferencia con un transporte preferiblemente de varios ejes de piezas de trabajo a través de estaciones de proceso con dos carriles […]
Dispositivo de transferencia para una prensa, del 9 de Julio de 2014, de MULLER WEINGARTEN AG: Prensa con un dispositivo de transferencia con un transporte preferiblemente de varios ejes de piezas de trabajo a través de estaciones de proceso con dos carriles […]