MANIPULADOR DE GRANDES DIMENSIONES CON AMORTIGUADOR DE OSCILACIONES.
Manipulador de grandes dimensiones, especialmente para bombas de hormigón,
con un caballete de soporte de pluma (21) dispuesto sobre un bastidor (11) y preferentemente giratorio sobre un eje de giro vertical (13), con una pluma flexible (22) compuesta de al menos de tres brazos de pluma (23 a 27), configurado preferentemente como pluma de distribución de hormigón en el que los brazos de pluma (23 a 27) son respectivamente pivoteables en forma limitada de a pares respecto al caballete de soporte de pluma (21) o brazo de pluma (28 a 26) adyacentes alrededor de ejes de plegado (28 a 32) horizontales paralelos entre sí, cada uno por medio de una unidad de accionamiento (34 a 38), con un dispositivo de mando (50, 62, 52), preferentemente operable a control remoto, para el movimiento de la pluma con ayuda de los elementos de regulación (68 a 76) asignados a los diferentes mecanismos de accionamiento (34 a 38), y con elementos (82, 84, 86) para la amortiguación de oscilaciones mecánicas en la pluma flexible (22), caracterizado porque una disposición para la compensación de la deriva de la pluma flexible (22), que al menos presenta un sensor de ángulo sólido (94) o sensor de distancia dispuesto en uno de los brazos de pluma (27), una memoria de valores nominales (96), así como un comparador conectado del lado de entrada con la memoria de valores nominales y con la salida del sensor de ángulo sólido o de distancia, para controlar al menos uno de los elementos de regulación (68 a 76)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07119143.
Solicitante: PUTZMEISTER AKTIENGESELLSCHAFT.
Nacionalidad solicitante: Alemania.
Dirección: MAX-EYTH-STRASSE 10,72631 AICHTAL.
Inventor/es: RAU, KURT.
Fecha de Publicación: .
Fecha Solicitud PCT: 4 de Julio de 2001.
Fecha Concesión Europea: 16 de Junio de 2010.
Clasificación Internacional de Patentes:
- E04G21/04 CONSTRUCCIONES FIJAS. › E04 EDIFICIOS. › E04G ANDAMIAJES; MOLDES; ENCOFRADOS; HERRAMIENTAS O ACCESORIOS PARA LA CONSTRUCCION, O SU EMPLEO; MANIPULACIÓN DE LOS MATERIALES DE CONSTRUCCION EN LA PROPIA OBRA; REPARACION, DEMOLICION U OTROS TRABAJOS EN EDIFICIOS CONSTRUIDOS. › E04G 21/00 Preparación, transporte o trabajo de los materiales o de elementos de construcción in situ ; Otros dispositivos o medidas concernientes a los trabajos de construcción (trabajo de los materiales análogos a la piedra B28D; transporte en general B65G; aparatos de elevación B66; instrumentos de medida G01). › Dispositivos para transportar y distribuir simultáneamente (bombas para hormigón F04).
Clasificación PCT:
- E04G21/04 E04G 21/00 […] › Dispositivos para transportar y distribuir simultáneamente (bombas para hormigón F04).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Finlandia, Chipre.
Fragmento de la descripción:
Manipulador de grandes dimensiones con amortiguador de oscilaciones.
El invento se refiere a un manipulador de grandes dimensiones, especialmente para bombas de hormigón, con un caballete de soporte de pluma dispuesto sobre un bastidor y preferentemente giratorio sobre un eje de giro vertical, con una pluma flexible compuesta al menos de tres brazos de pluma, configurado preferentemente como pluma de distribución de hormigón en el que los brazos de pluma son respectivamente pivoteables en forma limitada de a pares, respecto al caballete de soporte de pluma o brazo de pluma adyacentes alrededor de ejes de plegado horizontales paralelos entre sí, cada uno por medio de una unidad de accionamiento, con un dispositivo de mando, preferentemente operable a control remoto, para el movimiento de la pluma con ayuda de los elementos de regulación asignados a los diferentes mecanismos de accionamiento, y con elementos para la amortiguación de oscilaciones mecánicas en la pluma flexible.
La pluma flexible de un manipulador de grandes dimensiones de este tipo es en su construcción un sistema que puede oscilar elásticamente, excitable a oscilaciones propias. Una excitación resonante de oscilaciones de este tipo puede producir que la punta de la pluma oscile con amplitudes de un metro o mayores. Una excitación de oscilaciones es posible, por ejemplo, mediante el funcionamiento pulsante de una bomba de hormigón y por la aceleración y desaceleración periódica resultante de la columna de hormigón comprimida a través de la tubería de transporte. Ello tiene como consecuencia, que el hormigón ya no puede distribuirse de modo uniforme y el trabajador que maneja la manguera final corre peligro. Para evitar esto, en una bomba de hormigón con pluma flexible conocida (DE-A 195 03 895) se propuso la utilización de un bucle cerrado regulador de posición que estabiliza el nivel de la punta de la pluma respecto a un plano referencial horizontal fijo, dentro de un margen de variación predeterminado. Para ello, hay dispuesto un dispositivo sensor mediante cuyas señales de salida puede controlarse un accionamiento de regulador de coordenadas para la deflexión compensatoria de la punta de pluma o de la manguera final. Se ha demostrado que estas medidas son bastante complejas y no siempre producen los resultados deseados. La sensórica del movimiento de brazos necesario para la regulación se activa solamente cuando el movimiento ya se realizó, o sea, cuando ya es demasiado tarde. O sea, con ello no es posible conseguir una calidad regulatoria suficiente. Además, de este modo no es posible una compensación de deriva.
Basado en ello, el invento tiene el objetivo de adoptar precauciones y medidas de procedimientos con las que mediante medios sencillos sea posible una amortiguación óptima de la pluma con compensación de deriva.
Para conseguir este objetivo se proponen las combinaciones de características indicadas en las reivindicaciones 1 y 15. Configuraciones y perfeccionamientos ventajosos del invento resultan de las reivindicaciones dependientes.
Debido a que la amortiguación de la pluma sin regulación de la posición puede producir una deriva no deseada de la punta de la pluma, se propone, conforme a una configuración ventajosa del invento, que en una pluma flexible extendida a una posición de trabajo definida se mida a intervalos de tiempo definidos la inclinación y la distancia al suelo del brazo terminal y se compare con un valor nominal previamente almacenado y que al producirse una deriva, la pluma flexible es restituida por medio del control de al menos uno de los mecanismos de accionamiento. Para lograr esto se propone una disposición de la compensación de deriva de la pluma flexible presente al menos un sensor de inclinación o de distancia dispuesto en uno de los brazos de la pluma, una memoria de valores nominales y un comparador conectado a la salida del sensor de inclinación o de distancia para el control de al menos uno de los actuadores. El sensor de inclinación o de distancia está dispuesto de manera favorable en el brazo terminal de la pluma flexible, mientras que la memoria de valores nominales puede ser cargada con la señal de salida digital del sensor de inclinación o de distancia a través de una rutina de control. La rutina de control se encarga de que el valor de inclinación momentáneo o la distancia al suelo del brazo terminal al llegar a la posición de trabajo de la pluma flexible sean memorizados en la memoria de valores nominales.
Para amortiguar las oscilaciones mecánicas en la pluma flexible se propone según el invento que en al menos uno de los mecanismos de accionamiento o en el brazo de pluma correspondiente, se determine el valor de medida en función de tiempo derivado de las oscilaciones mecánicas del brazo de pluma respectivo, se procese en una unidad de evaluación formando una señal de amortiguación dinámica y se conecte a un elemento de control que controla el mecanismo de accionamiento correspondiente.
Según una configuración preferente del invento, en la que el mecanismo de accionamiento está conformado como cilindro hidráulico de doble efecto, la diferencia de presión en función del tiempo entre el lado de la cabeza del émbolo y el lado del vástago de émbolo del cilindro hidráulico es determinada como valor de medida y evaluada en la unidad de evaluación para formar la señal de amortiguación dinámica. En la preparación de la señal, la parte dinámica de la diferencia de presión en función del tiempo se filtra apropiadamente por encima de una frecuencia de corte definida y es desfasada y/o amplificada para formar la señal de amortiguación. La frecuencia de corte se ajusta en función de la frecuencia propia del brazo de pluma respectivo, preferentemente en el intervalo de 0,2 a 10 Hz. En todo caso, la frecuencia de corte del filtro de paso alto debería elegirse algo más baja que la frecuencia propia del brazo de pluma respectivo.
Para ejecutar el procedimiento descrito se propone, según el invento, que al menos uno de los mecanismos de accionamiento o brazos de pluma tengan asignado al menos un sensor para determinar el valor de medida en función de tiempo derivado de la oscilación mecánica del brazo de pluma respectivo, así como una unidad de evaluación posterior al como mínimo, un sensor conectado en el lado de salida al elemento de regulación respectivo, para producir una señal de amortiguación.
Según una configuración preferente del invento, cada mecanismo de accionamiento presenta un cilindro hidráulico de doble efecto, pudiendo los cilindros hidráulicos ser presurizados con aceite a presión por medio de una válvula proporcional de múltiples vías que forma el elemento de regulación correspondiente. En este caso, según el invento, en el extremo del lado del vástago de émbolo y del lado de la cabeza de émbolo de al menos uno de los cilindros hidráulicos se encuentra dispuesto en cada caso un transductor de presión, que está conectado a la unidad de evaluación a través de un elemento de comparación o diferencial. Favorablemente, la unidad de evaluación comprende un filtro de paso alto que puede ser analógico o digital. Preferentemente, las frecuencias de corte de los filtros paso alto pertenecientes a cada brazo de pluma pueden ajustarse separadamente en función de las frecuencias propias del brazo de pluma respectivo. Las frecuencias de corte típicas de filtros de paso alto son 0,2 a 10 Hz.
Una configuración preferente del invento dispone que el filtro de paso alto está formado por un filtro de paso bajo, cuya entrada está conectada a su salida por medio de un elemento diferencial. Para evitar sobreimpulsos, cada filtro de paso alto forma una respuesta transitoria. Además, cada filtro de paso alto tiene, preferentemente, posconectado un circuito o rutina de evaluación y seguridad que puede ser activado del lado de entrada adicionalmente con las señales de salida de ambos transductores de presión de los cilindros hidráulicos asignados.
Una configuración preferente del invento dispone que el dispositivo de control presenta un microcontrolador con sensor de coordenadas para controlar los elementos de regulación que por el lado de la entrada puede ser activado mediante un sistema bus y un dispositivo de control remoto con datos de mando para el movimiento de la pluma, que cada elemento de regulación tiene asignado adicionalmente, formando la unidad de amortiguación, un portador que por el lado de entrada puede ser cargado con los valores de medición del brazo de pluma respectivo y por el lado de salida está conectado con el elemento de regulación. Con estas precauciones, la pluma flexible es comandada por el...
Reivindicaciones:
1. Manipulador de grandes dimensiones, especialmente para bombas de hormigón, con un caballete de soporte de pluma (21) dispuesto sobre un bastidor (11) y preferentemente giratorio sobre un eje de giro vertical (13), con una pluma flexible (22) compuesta de al menos de tres brazos de pluma (23 a 27), configurado preferentemente como pluma de distribución de hormigón en el que los brazos de pluma (23 a 27) son respectivamente pivoteables en forma limitada de a pares respecto al caballete de soporte de pluma (21) o brazo de pluma (28 a 26) adyacentes alrededor de ejes de plegado (28 a 32) horizontales paralelos entre sí, cada uno por medio de una unidad de accionamiento (34 a 38), con un dispositivo de mando (50, 62, 52), preferentemente operable a control remoto, para el movimiento de la pluma con ayuda de los elementos de regulación (68 a 76) asignados a los diferentes mecanismos de accionamiento (34 a 38), y con elementos (82, 84, 86) para la amortiguación de oscilaciones mecánicas en la pluma flexible (22), caracterizado porque una disposición para la compensación de la deriva de la pluma flexible (22), que al menos presenta un sensor de ángulo sólido (94) o sensor de distancia dispuesto en uno de los brazos de pluma (27), una memoria de valores nominales (96), así como un comparador conectado del lado de entrada con la memoria de valores nominales y con la salida del sensor de ángulo sólido o de distancia, para controlar al menos uno de los elementos de regulación (68 a 76).
2. Manipulador de grandes dimensiones, según la reivindicación 1, caracterizado porque el sensor de ángulo sólido o de distancia está dispuesto en el brazo terminal (27) de la pluma flexible (22).
3. Manipulador de grandes dimensiones, según la reivindicación 1 ó 2, caracterizado porque la memoria de valores nominales (96) puede ser cargado mediante una rutina de control con la señal digital de salida del sensor de ángulo sólido o de distancia (94).
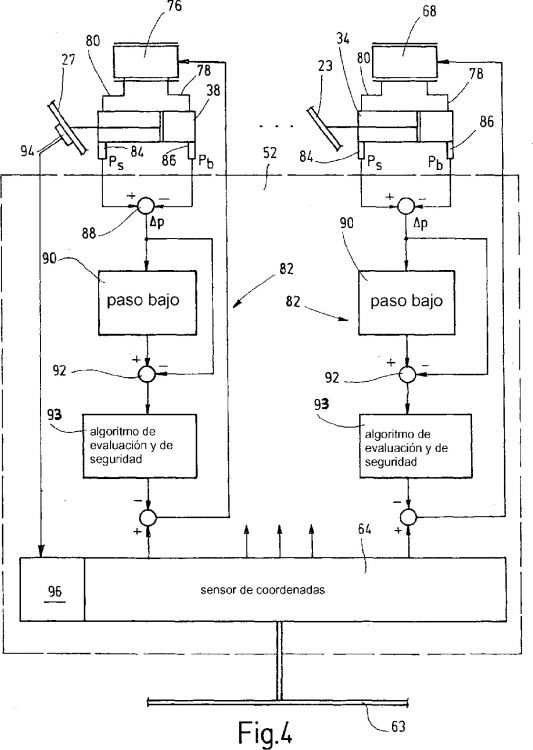
4. Manipulador de grandes dimensiones, según la reivindicación 3, caracterizado porque a al menos uno de los mecanismos de accionamiento (34 a 38) o brazos de pluma (23 a 27) está asignado al menos un sensor (84, 86) para determinar el valor de medición (?p) en función de tiempo derivado de las oscilaciones mecánicas del brazo de pluma (23 a 27) respectivo, así como una unidad de evaluación (82) posconectada a como mínimo un sensor (84, 86), conectada del lado de salida al elemento de regulación (68 a 76) correspondiente, para generar una señal de amortiguación.
5. Manipulador de grandes dimensiones, según la reivindicación 4, caracterizado porque cada mecanismo de accionamiento (34 a 38) presenta un cilindro hidráulico de doble efecto, porque cada uno de los cilindros hidráulicos son presurizables con aceite a presión a través de la válvula proporcional de múltiples vías (68 a 76) que forma el elemento de regulación, porque en el extremo del lado de cabeza de émbolo y del lado de vástago de émbolo de al menos uno de los cilindros hidráulicos se encuentra dispuesto en cada caso un sensor de presión (84, 86) que, preferentemente, están conectados con una unidad de evaluación (82) a través de un comparador (88).
6. Manipulador de grandes dimensiones, según la reivindicación 5, caracterizado porque la unidad de evaluación (82) contienen un filtro de paso alto (90, 92) analógico o digital.
7. Manipulador de grandes dimensiones, según la reivindicación 6, caracterizado porque las frecuencias de corte de los filtros de paso alto (90, 92) correspondientes a los distintos brazos de pluma (23 a 27) son ajustables en forma independiente una de la otra.
8. Manipulador de grandes dimensiones, según la reivindicación 6 ó 7, caracterizado porque las frecuencias de corte de los filtros de paso alto (90, 92) son ajustables en función de la frecuencia propia de los brazos de pluma (23 a 27) correspondientes.
9. Manipulador de grandes dimensiones, según una de las reivindicaciones 6 a 8, caracterizado porque las frecuencias de corte de los filtros de paso alto (90, 92) pueden ajustarse a un valor de 0,2 a 10 Hz.
10. Manipulador de grandes dimensiones, según una de las reivindicaciones 6 a 9, caracterizado porque cada filtro de paso alto está formado por un filtro de paso bajo (90) cuya entrada está conectada a su salida a través de un comparador (92).
11. Manipulador de grandes dimensiones, según una de las reivindicaciones 6 a 10, caracterizado porque cada filtro de paso alto (90, 92) forma una función transitoria aperiódica.
12. Manipulador de grandes dimensiones, según una de las reivindicaciones 6 a 11, caracterizado porque cada filtro de paso alto (90, 92) tiene posconectado un circuito o rutina de evaluación y seguridad (93).
13. Manipulador de grandes dimensiones, según la reivindicación 12, caracterizado porque el circuito o rutina de evaluación y seguridad (93) puede ser activado en el lado de entrada con las señales de salida (ps, pb) de los dos sensores de presión (84, 86).
14. Manipulador de grandes dimensiones, según una de las reivindicaciones 4 a 13, caracterizado porque el dispositivo de control presenta un microcontrolador (52) con un sensor de coordenadas (64) para controlar los elementos de regulación (68 a 76) que por el lado de la entrada puede ser activado mediante un sistema bus (63) y un dispositivo de control remoto (50, 64) con datos de mando para el movimiento de la pluma, porque cada elemento de regulación tiene asignado adicionalmente, formando la unidad de amortiguación (82), un repetidor que por el lado de entrada puede ser cargado con los valores de medición (?p) del brazo de pluma (23 a 27) respectivo.
15. Procedimiento para la amortiguación de oscilaciones mecánicas de una pluma flexible (22) en un manipulador de grandes dimensiones, en el que los brazos de pluma (23 a 27) de la pluma flexible (22) son pivoteables uno respecto de otro mediante mecanismos de accionamiento (34 a 38), caracterizado porque en una pluma flexible (22) extendida a una posición de trabajo, la inclinación o la distancia al suelo del brazo terminal es medida a intervalos de tiempo predeterminados y comparada con un valor nominal previamente almacenado, y porque al producirse una desviación del valor nominal la pluma flexible es restituida mediante el control de al menos uno de los elementos de regulación (68 a 76).
16. Procedimiento según la reivindicación 15, caracterizado porque en al menos uno de los mecanismos de accionamiento (34 a 38) o en el brazo de pluma (23 a 27) correspondiente es determinado un valor de medida derivado (?p) en función del tiempo de la oscilación mecánica del brazo de pluma respectivo, es procesado en una unidad de evaluación (82) formando una señal de amortiguación dinámica y conectado a un elemento de regulación (68 a 76) que controla el mecanismo de accionamiento respectivo.
17. Procedimiento, según la reivindicación 16, caracterizado porque en un mecanismo de accionamiento (34 a 38) configurado como cilindro hidráulico, la diferencia de presión (?p) en función de tiempo entre el lado de cabeza de émbolo y lado de vástago de émbolo del cilindro hidráulico es medido como valor de medición y evaluado en una unidad de evaluación (82) generando la señal de amortiguación.
18. Procedimiento, según la reivindicación 17, caracterizado porque en la unidad de evaluación (82, 90, 92) la parte dinámica del valor de medición (?p) es filtrado por encima de una frecuencia de corte definida y desfasada y/o amplificada para formar la señal de amortiguación.
19. Procedimiento, según la reivindicación 17, caracterizada porque la frecuencia de corte en función de la frecuencia mecánica propia del brazo de pluma correspondiente es ajustado preferentemente a un valor de 0,2 a 10 Hz.
Patentes similares o relacionadas:
SISTEMA DE CONSTRUCCIÓN ROBOTIZADO, del 17 de Octubre de 2019, de EVOLUTION CONSTRUCTION SYSTEM, S.L: Sistema de construcción robotizado que comprende un robot cartesiano que puede ser elevado de manera automática según la construcción va ganando altura, que […]
ROBOT PARA REFORMAS Y REHABILITACIONES, del 17 de Octubre de 2019, de EVOLUTION CONSTRUCTION SYSTEM, S.L: Robot para reformas y rehabilitaciones de edificios que comprende una estructura de perfiles que comprende, al menos, dos largueros paralelos fijos, verticales o longitudinales, […]
SISTEMA DE CONSTRUCCIÓN ROBOTIZADO., del 10 de Octubre de 2019, de EVOLUTION CONSTRUCTION SYSTEM, S.L: Sistema de construcción robotizado que comprende un robot cartesiano tipo pórtico que puede ser elevado de manera automática según la construcción va ganando altura, que cuenta […]
ROBOT PARA REFORMAS Y REHABILITACIONES., del 10 de Octubre de 2019, de EVOLUTION CONSTRUCTION SYSTEM, S.L: Robot para restauraciones y rehabilitaciones de edificios que comprende una estructura de perfiles que comprende, al menos, dos largueros […]
Dispositivo y procedimiento de fabricación de estructuras tridimensionales realizadas en capas sucesivas, del 4 de Abril de 2019, de ROCHER, Xavier: Dispositivo de deposición de material pastoso destinado a la fabricación capa por capa de una estructura tridimensional de grandes dimensiones que comprende: - por lo menos […]
Manipulador de gran tamaño con mástil sometido a pandeo y con medios para la medición de ángulo de giro, del 12 de Marzo de 2019, de SCHWING GMBH: Manipulador de gran tamaño con un mástil sometido a pandeo desplegable, que presenta un asiento giratorio que puede girar alrededor […]
Pluma de camión bomba para hormigón y camión bomba para hormigón, del 1 de Noviembre de 2017, de Zoomlion Heavy Industry Science and Technology Co., Ltd: Una pluma de camión bomba para hormigón que tiene un estado plegado y un estado desplegado, en donde dicha pluma comprende siete secciones de pluma […]
Método y sistema para controlar un manipulador de ingeniería a gran escala, del 6 de Septiembre de 2017, de Hunan Sany Intelligent Control Equipment Co., Ltd: Método para controlar un manipulador de ingeniería a gran escala, estando dotado cada uno de los segmentos de pluma del manipulador de un mecanismo de accionamiento, […]