DISPOSITIVO PARA OPERAR LA PLUMA ARTICULADA DE UN MANIPULADOR DE GRAN CAPACIDAD.
Dispositivo para el accionamiento de una pluma articulada (22) conectada a un caballete de soporte de pluma (21),
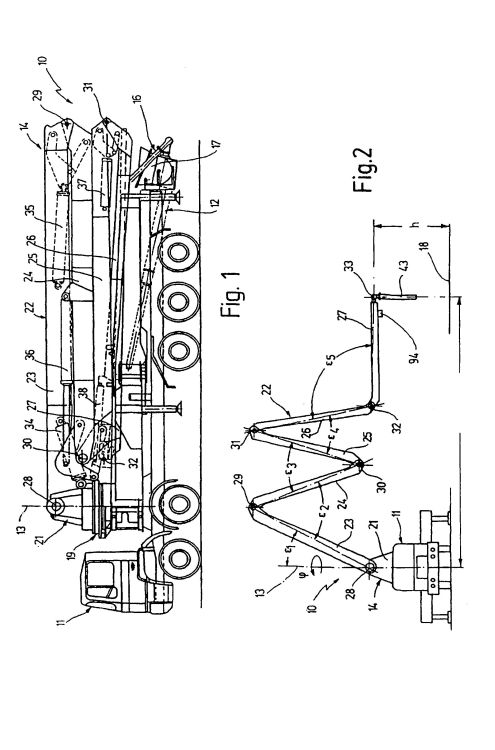
especialmente a un poste distribuidor de hormigón portando en su punta de pluma una manga terminal (43), presentando la pluma articulada (22) como mínimo tres brazos de pluma (23 a 27), cada uno limitadamente pivotante respecto del caballete de soporte de pluma (21) o respecto del brazo de pluma (23 a 27) adyacente, alrededor de ejes de articulación (28 a 32) horizontales paralelos entre sí por medio respectivamente de un mecanismo de accionamiento (34 a 38), siendo el caballete de soporte de pluma (21) montado a un bastidor (11) y siendo giratorio mediante un mecanismo de accionamiento (19), preferentemente en 360º alrededor de un eje vertical (13), con un dispositivo de control (74) para el movimiento de la pluma y un dispositivo de control a distancia (50) comunicado mediante un enlace de datos (68), preferentemente inalámbrico, presentando dicho dispositivo de control a distancia una primera y segunda unidad de control remoto (60, 62), cada uno pudiendo ser ajustado a mano ida y vuelta como mínimo en una dirección de posicionamiento principal y emitiendo al mismo tiempo una señal de salida (64, 66), presentando el dispositivo de control (74) un transformador de coordenadas asistido por ordenador (80), sensible a la señal de salida (64) de la primera unidad de control remoto (60), mediante el que los mecanismo de accionamiento (34 a 38) para los ejes de las articulaciones redundantes (28 a 32) pueden ser operados en una dirección de posicionamiento principal (r) de la primera unidad de control remoto (60) independientemente del mecanismo de accionamiento (19) del caballete de soporte de pluma (21), realizando un movimiento de extensión o retracción de la pluma articulada (14) conforme a una característica de desplazamiento/pivotado predeterminado, caracterizado porque el dispositivo de control (74) incluye una rutina de corrección (84) sensible a la señal de salida (66) de la segunda unidad de control remoto (62), mediante la que en una de las direcciones de posicionamiento principales (epsilon v) de la segunda unidad de control remoto (62) puede operarse preferentemente el mecanismo de accionamiento de un eje de articulación (j) seleccionado, manteniendo la posición y/o el movimiento de la punta de la pluma (33) predeterminado por la primera unidad de control remoto (60) mediante el seguimiento del mecanismo de accionamiento de cómo mínimo uno de los demás ejes de articulación.
Tipo: Resumen de patente/invención.
Solicitante: PUTZMEISTER AKTIENGESELLSCHAFT.
Nacionalidad solicitante: Alemania.
Dirección: MAX-EYTH-STRASSE 10,72631 AICHTAL.
Inventor/es: BENCKERT, HARTMUT, RAU, KURT.
Fecha de Publicación: .
Fecha Concesión Europea: 25 de Junio de 2008.
Clasificación PCT:
- E04G21/04 CONSTRUCCIONES FIJAS. › E04 EDIFICIOS. › E04G ANDAMIAJES; MOLDES; ENCOFRADOS; HERRAMIENTAS O ACCESORIOS PARA LA CONSTRUCCION, O SU EMPLEO; MANIPULACIÓN DE LOS MATERIALES DE CONSTRUCCION EN LA PROPIA OBRA; REPARACION, DEMOLICION U OTROS TRABAJOS EN EDIFICIOS CONSTRUIDOS. › E04G 21/00 Preparación, transporte o trabajo de los materiales o de elementos de construcción in situ ; Otros dispositivos o medidas concernientes a los trabajos de construcción (trabajo de los materiales análogos a la piedra B28D; transporte en general B65G; aparatos de elevación B66; instrumentos de medida G01). › Dispositivos para transportar y distribuir simultáneamente (bombas para hormigón F04).
Patentes similares o relacionadas:
ROBOT PARA REFORMAS Y REHABILITACIONES, del 17 de Octubre de 2019, de EVOLUTION CONSTRUCTION SYSTEM, S.L: Robot para reformas y rehabilitaciones de edificios que comprende una estructura de perfiles que comprende, al menos, dos largueros paralelos fijos, verticales o longitudinales, […]
SISTEMA DE CONSTRUCCIÓN ROBOTIZADO, del 17 de Octubre de 2019, de EVOLUTION CONSTRUCTION SYSTEM, S.L: Sistema de construcción robotizado que comprende un robot cartesiano que puede ser elevado de manera automática según la construcción va ganando altura, que […]
SISTEMA DE CONSTRUCCIÓN ROBOTIZADO., del 10 de Octubre de 2019, de EVOLUTION CONSTRUCTION SYSTEM, S.L: Sistema de construcción robotizado que comprende un robot cartesiano tipo pórtico que puede ser elevado de manera automática según la construcción va ganando altura, que cuenta […]
ROBOT PARA REFORMAS Y REHABILITACIONES., del 10 de Octubre de 2019, de EVOLUTION CONSTRUCTION SYSTEM, S.L: Robot para restauraciones y rehabilitaciones de edificios que comprende una estructura de perfiles que comprende, al menos, dos largueros […]
Dispositivo y procedimiento de fabricación de estructuras tridimensionales realizadas en capas sucesivas, del 4 de Abril de 2019, de ROCHER, Xavier: Dispositivo de deposición de material pastoso destinado a la fabricación capa por capa de una estructura tridimensional de grandes dimensiones que comprende: - por lo menos […]
Manipulador de gran tamaño con mástil sometido a pandeo y con medios para la medición de ángulo de giro, del 12 de Marzo de 2019, de SCHWING GMBH: Manipulador de gran tamaño con un mástil sometido a pandeo desplegable, que presenta un asiento giratorio que puede girar alrededor […]
Pluma de camión bomba para hormigón y camión bomba para hormigón, del 1 de Noviembre de 2017, de Zoomlion Heavy Industry Science and Technology Co., Ltd: Una pluma de camión bomba para hormigón que tiene un estado plegado y un estado desplegado, en donde dicha pluma comprende siete secciones de pluma […]
Método y sistema para controlar un manipulador de ingeniería a gran escala, del 6 de Septiembre de 2017, de Hunan Sany Intelligent Control Equipment Co., Ltd: Método para controlar un manipulador de ingeniería a gran escala, estando dotado cada uno de los segmentos de pluma del manipulador de un mecanismo de accionamiento, […]