PROCEDIMIENTO PARA LA REALIZACION DE UN ENSAYO FUNCIONAL PARA UNA INSTALACION DE MEDICION DE LA POSICION E INSTALACION DE MEDICION DE LA POSICION PARA LA REALIZACION DEL PROCEDIMIENTO.
Procedimiento para la realización de un ensayo funcional de una instalación de medición de la posición,
que genera valores de posición durante la exploración de una medición material por medio de una unidad de detección de la posición, en el que para la verificación funcional a) se genera en la instalación de medición de la posición al menos un valor de control, que presenta una relación matemática definida con respecto a uno de los valores de posición, en los que entra como parámetro un valor de corrección registrado en la instalación de medición de la posición, b) se transmite el valor de control junto con el valor de posición asociado a una unidad de evaluación dispuesta a continuación de la instalación de medición de la posición, y c) se verifica en la unidad de evaluación la presencia de la relación matemática entre el valor de control y el valor de posición, caracterizado porque el valor de corrección (Npv1, Npv2) está depositado en la instalación de medición de la posición (1) bajo dos direcciones de memoria diferentes y porque la instalación de medición de la posición (1) accede para la formación de una relación matemática definida entre el valor de control y el valor de posición asociado al valor de corrección (Npv1) bajo una de las direcciones de la memoria y la unidad de evaluación (3) accede durante la verificación de la presencia de la relación matemática entre el valor de control y el valor de posición asociado al valor de corrección (Npv2) bajo la otra dirección de la memoria
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E05020655.
Solicitante: DR. JOHANNES HEIDENHAIN GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 12 60 83292 TRAUNREUT ALEMANIA.
Inventor/es: STRASSER, ERICH.
Fecha de Publicación: .
Fecha Solicitud PCT: 22 de Septiembre de 2005.
Fecha Concesión Europea: 25 de Agosto de 2010.
Clasificación Internacional de Patentes:
- G01D18/00C
- G01D5/244D1
- G01D5/244P3
- G01D5/244Q1
- G01D5/244R4
Clasificación PCT:
- G01D18/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › Aparatos para ensayos o calibraciones o las disposiciones previstas en los grupos G01D 1/00 - G01D 15/00.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
La invención se refiere a un procedimiento para la realización de un ensayo funcional para una instalación de medición de la posición de acuerdo con el preámbulo de la reivindicación 1 de la patente y a una instalación de medición de la posición para la realización del procedimiento de acuerdo con el preámbulo de la reivindicación 10 de la patente, como se publica, por ejemplo, en el documento EP-A-1 614 990.
Un dispositivo de medición de la posición comprende una unidad de detección de la posición para la generación de palabras de datos de la posición, que son emitidas a una unidad de procesamiento de la instalación de medición de la posición y a partir de las cuales se generan valores de posición en la unidad de procesamiento. La generación de las palabras de datos de la posición por medio de la unidad de detección de la posición se realiza en este caso por medio de exploración, por ejemplo exploración óptica, de una medición material (división de la medición) por medio de un registrador del valor de medición durante un movimiento relativo de la unidad de detección de la posición con respecto a la medida material. Si el registrador del valor de medición de la unidad de detección de la posición trabaja, por ejemplo, de manera conocida de acuerdo con un principio de exploración magnético u óptico, entonces comprende detectores magnéticos o bien detectores ópticos (foto detectores), que generan señales eléctricas durante la exploración de la medición material (división de la medición) asociada, las cuales son transmitidas como palabras de datos digitales de posición para la generación de valores de posición a la unidad de procesamiento.
Cuando la unidad de detección de la posición, por una parte, y la medición material, por otra parte, se disponen, respectivamente, en uno de dos objetos móviles entre sí, por ejemplo en forma de partes de máquina de una máquina herramienta, se puede detectar de esta manera la posición respectiva de uno de los objetos con respecto al otro objeto y, en concreto, en función del tipo de medición material o bien en forma de una posición absoluta (utilizando una medición material formada por una pista de código) o en forma de modificaciones relativas de la posición (utilizando una división de la medición periódica incremental como medición material). En función del tipo de movimiento de los dos objetos entre sí, la instalación de medición de la posición puede estar configurada, por una parte, para la medición de longitudes o, por otra parte, para la medición de ángulos.
Para asegurar que los valores de posición generados en la unidad de procesamiento a partir de las palabras de datos de posición y que deben transmitirse para la evaluación a una unidad de evaluación (electrónica secuencial) dispuesta a continuación de la instalación de medición de la posición no son falsificados en virtud de funciones electrónicas erróneas
o bien interferencias, se realiza durante la medición de la posición una verificación de la función, generando en la instalación de medición de la posición, adicionalmente a los valores de posición, al menos un valor de control, que presenta una relación matemática definida con respecto a uno de los valores de posición, de manera que en esta relación matemática entra un valor de corrección, que está registrado en una memoria de la instalación de medición de la posición.
El valor de control es transmitido junto con los valores de posición hacia la unidad de evaluación (electrónica secuencial) conectada a continuación de la instalación de medición de la posición, en la que se puede tratar, por ejemplo, de un componente de un control de máquina, que controla una máquina herramienta en función de los valores de posición generados en la instalación de medición de la posición. En la unidad de evaluación y en algunas aplicaciones también ya en la instalación de medición de la posición propiamente dicha se pueden formar, a partir de varios valores de posición individuales, valores compuestos o bien derivados, como por ejemplo valores de velocidad como modificación de los valores de posición individuales con el tiempo y valores de aceleración como modificación de los valores de velocidad individuales con el tiempo. Por lo tanto, en el presente caso el concepto “valores de posición” debe comprender también los valores compuestos o bien derivados en cada caso a partir de varios valores de posición individuales, como velocidad, aceleración y empuje. Pero el campo de aplicación principal es la transmisión de valores de posición individuales en sentido estricto desde la instalación de medición de la posición hacia la unidad de evaluación, donde a partir de estos valores se forman entonces, dado el caso, otras magnitudes necesarias para el control o bien regulación de una máquina, como por ejemplo velocidad y aceleración.
En la unidad de evaluación (electrónica secuencial) se verifica también si entre el valor de control y el valor de posición asociado existe la relación matemática esperada y, en concreto, utilizando el valor de corrección registrado en la memoria de la instalación de medición de la posición, que se transmite a tal fin a la electrónica secuencial. Así, por ejemplo, los valores de posición generados en una instalación de medición de la posición son impulsados regularmente con una desviación en forma de un llamado desplazamiento del punto cero, antes de que el valor de posición respectivo sea transmitido a la electrónica secuencial. De esta manera, para cada tipo de disposición de la instalación de medición de la posición en una máquina herramienta o similar se genera una posición de referencia definida (la llamada posición cero). Un desplazamiento del punto cero adecuado se determina, en general, durante la primera puesta en funcionamiento de una instalación de medición de la posición.
Además de los valores de posición impulsados con el desplazamiento del punto cero se pueden generar, en la instalación de medición de la posición segundos valores de posición designados como valores de control, que no están impulsados con el desplazamiento del punto cero y que se refieren, respectivamente, al mismo valor de medición de la posición (es decir, la misma palabra de datos de la posición) que uno de los valores de posición (propios) impulsados con el desplazamiento del punto cero. El valor de control respectivo y el valor de posición asociado se generan en este caso con preferencia de manera independiente entre sí.
Puesto que tanto los valores de posición impulsados con el desplazamiento del punto cero como también los valores de control no impulsados con el deslazamiento del punto cero son transmitidos a una electrónica secuencial dispuesta a continuación de la instalación de medición de la posición, se puede realizar allí una comparación entre los valores de posición individuales y un valor de control asociado en cada caso (es decir, que se refiere a la misma palabra de datos de posición generada por el registrador del valor de medición). A través de la comparación de valores de control y de valores de posición asociados entre sí en la electrónica secuencial se puede verificar si entre éstos existe la relación matemática esperada y, en concreto, utilizando el valor de corrección introducido en esta relación matemática, que se lee a tal fin desde la memoria de la instalación de medición de la posición.
No obstante, en esta verificación de la función no se pueden reconocer aquellos errores que se basan en un defecto de hardware de determinadas células de memoria de la instalación de medición de la posición. Puesto que una falsificación del valor de corrección en virtud de un defecto de hardware en la memoria de la instalación de posición repercute durante la generación del valor de control en la instalación de medición de la posición de la misma manera que en la verificación posterior de la relación matemática entre un valor de posición y el valor de control asociado en la electrónica secuencial dispuesta a continuación.
Por lo tanto, la invención se basa en el problema se mejorar adicionalmente un procedimiento para la verificación de la función del tipo mencionado al principio con respecto a su fiabilidad.
Este problema se soluciona de acuerdo con la invención por medio de la creación de un procedimiento con las características de la reivindicación 1 de la patente.
De acuerdo con ello, el valor de corrección en la instalación de medición de la posición se deposita bajo dos direcciones...
Reivindicaciones:
1. Procedimiento para la realización de un ensayo funcional de una instalación de medición de la posición, que genera valores de posición durante la exploración de una medición material por medio de una unidad de detección de la posición, en el que para la verificación funcional
a) se genera en la instalación de medición de la posición al menos un valor de control, que presenta una relación matemática definida con respecto a uno de los valores de posición, en los que entra como parámetro un valor de corrección registrado en la instalación de medición de la posición,
b) se transmite el valor de control junto con el valor de posición asociado a una unidad de evaluación dispuesta a continuación de la instalación de medición de la posición, y
c) se verifica en la unidad de evaluación la presencia de la relación matemática entre el valor de control y el valor de posición,
caracterizado porque el valor de corrección (Npv1, Npv2) está depositado en la instalación de medición de la posición (1) bajo dos direcciones de memoria diferentes y porque la instalación de medición de la posición (1) accede para la formación de una relación matemática definida entre el valor de control y el valor de posición asociado al valor de corrección (Npv1) bajo una de las direcciones de la memoria y la unidad de evaluación (3) accede durante la verificación de la presencia de la relación matemática entre el valor de control y el valor de posición asociado al valor de corrección (Npv2) bajo la otra dirección de la memoria.
2. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque el al menos un valor de control y el valor de posición asociado son generados de manera independiente entre sí en la instalación de medición de la posición (1) a partir de una palabra de datos generada por medio de un registrador del valor de medición (11) de la instalación de medición de la posición (1) durante la exploración de una medición material asociada.
3. Procedimiento de acuerdo con la reivindicación 1 ó 2, caracterizado porque las dos direcciones de memoria, bajo las cuales está depositado el valor de corrección (Npv1, Npv2), están asociadas, respectivamente, a una célula de memoria (16, 17) de una unidad de memoria (15).
4. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque la unidad de memoria (15) se forma por una memoria no volátil.
5. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el valor de corrección (Npv2) memorizado bajo la otra dirección de memoria es transferido durante la puesta en funcionamiento de la instalación de medición de la posición (1) a la unidad de evaluación (3).
6. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el al menos un valor de control y el valor de posición asociado se distinguen por un valor aditivo, que se determina a través del valor de corrección (Npv1, Npv2).
7. Procedimiento de acuerdo con la reivindicación 6, caracterizado porque el valor de corrección representa un desplazamiento del punto cero de los valores de
posición.
8. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque la unidad de procesamiento (3) es componente de una instalación de control (S), que evalúa los valores de posición para la generación de señales de control.
9. Procedimiento de acuerdo con la reivindicación 8, caracterizado porque la instalación de control (S) se utiliza para el control de una máquina herramienta (W).
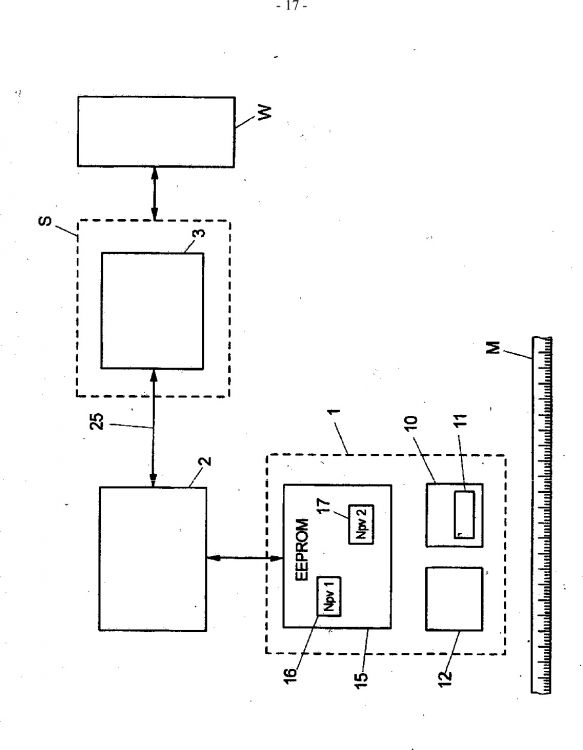
10. Instalación de medición de la posición, especialmente para la realización del procedimiento de acuerdo con una de las reivindicaciones anteriores, con
- una unidad de detección de la posición (10) y una unidad de procesamiento (12) asociada para la generación de valores de posición y de valores de control durante la exploración de una medición material (M), en la que los valores de control presentan una relación matemática definida con cada uno de los valores de posición,
- una unidad de memoria (15) para el registro de un valor de corrección, que entra como parámetro en la relación matemática entre valores de posición asociados entre sí y valores de control, y
- una unidad de evaluación (3) conectada a continuación de la instalación de medición de la posición para la verificación de la relación matemática entre los valores de control y los valores de posición,
caracterizada porque el valor de corrección (Npv1, Npv2) está depositado en la unidad de memoria (15) bajo dos direcciones de memoria diferentes, de manera que la instalación de medición de la posición (1) puede acceder para la formación de una relación matemática definida entre un valor de control y el valor de posición asociado al valor de corrección (Npv1) bajo una de las direcciones de la memoria y la unidad de evaluación (3) puede acceder para la verificación de la relación matemática entre el valor de control y el valor de posición asociado al valor de corrección (Npv2) bajo la otra dirección de la memoria.
11. Instalación de medición de la posición de acuerdo con la reivindicación 10, caracterizada porque las dos direcciones de la memoria, bajo las cuales está depositado el valor de corrección (Npv1, Npv2), presentan, respectivamente una célula de la memoria (16, 17) de la unidad de memoria (15).
12. Instalación de medición de la posición de acuerdo con la reivindicación 11, caracterizada porque la unidad de memoria (15) se forma por una memoria no volátil.
13. Instalación de medición de la posición de acuerdo con una de las reivindicaciones 10 a 12, caracterizada porque la unidad de procesamiento (3) es componente de una instalación electrónica de control (S), que evalúa los valores de posición para la generación de señales de control.
14. Instalación de medición de la posición de acuerdo con la reivindicación 13, caracterizada porque la instalación de control (S) está configurada y prevista para el control de una máquina herramienta (W).
Patentes similares o relacionadas:
 SISTEMA DE DETECCIÓN Y PROCEDIMIENTO DE DETECCIÓN, del 22 de Junio de 2011, de SICK AG: Sistema de detección para la detección y seguimiento de códigos ópticos en objetos , que son transportados a lo largo de una zona […]
SISTEMA DE DETECCIÓN Y PROCEDIMIENTO DE DETECCIÓN, del 22 de Junio de 2011, de SICK AG: Sistema de detección para la detección y seguimiento de códigos ópticos en objetos , que son transportados a lo largo de una zona […]
 PROCEDIMIENTO PARA LA OPERACIÓN DE UN INTERRUPTOR DE POSICIÓN ELECTRÓNICO-MECÁNICO, del 4 de Marzo de 2011, de EATON INDUSTRIES GMBH: - Procedimiento para la operación de un interruptor de posición electrónico - mecánico , que contiene una carcasa , una varilla de accionamiento , […]
PROCEDIMIENTO PARA LA OPERACIÓN DE UN INTERRUPTOR DE POSICIÓN ELECTRÓNICO-MECÁNICO, del 4 de Marzo de 2011, de EATON INDUSTRIES GMBH: - Procedimiento para la operación de un interruptor de posición electrónico - mecánico , que contiene una carcasa , una varilla de accionamiento , […]
Dispositivo de medición de la posición y procedimiento para el funcionamiento de un dispositivo de medición de la posición, del 29 de Abril de 2020, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de la posición que comprende: - un soporte de división , sobre el que está dispuesta la división de la medición , - una […]
Dispositivo de medida de posición y método para utilizar un dispositivo de medida de posición, del 6 de Noviembre de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medida de posición que comprende un soporte de graduación sobre el que hay situada una graduación de medida , una unidad de detección […]
SISTEMA Y MÉTODO PARA DETERMINAR EL ESTADO FUNCIONAL DE UN INSTRUMENTO SENSOR EN FORMA REMOTA, del 31 de Octubre de 2019, de XANCURA SPA: La presente invención se relaciona con un sistema para determinar el estado funcional de un instrumento sensor en forma remota, sin necesidad de intervenir […]
Dispositivo de medición de la posición y método para el accionamiento de un dispositivo de medición de la posición, del 12 de Junio de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Un dispositivo de medición de la posición con - elementos de exploración (6 a 10) que están asignados a al menos una graduación de medición periódica […]
Procedimiento para calibrar un codificador rotatorio, del 20 de Febrero de 2019, de BAUMULLER NURNBERG GMBH: Procedimiento para calibrar un codificador rotatorio de una máquina eléctrica diseñado como un transmisor incremental que emite una […]
Dispositivo de medición de posición y método para verificar una señal de ciclo de trabajo, del 13 de Febrero de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de posición que comprende una unidad de detección de posición , una unidad de procesamiento , una unidad de interfaz […]