INSPECCION Y REPARACION AUTOMATIZADAS DE PALES.
- Una célula de inspección y reparación automatizadas de palés,
en la que unos palés inspeccionados son transportados hacia uno o más puestos (97, 98, 150, 151) desde un puesto (16) de inspección automatizada, y se usa un sujetador (30; 40; 50; 60; 70) de palés para mover palés, caracterizada porque el puesto o puestos son puestos (97, 98, 150, 151) para la reparación de palés, porque el sujetador de palé está fijado a un brazo de un robot (14; 15) de ejes múltiples, porque el puesto (16) de inspección es operativo para componer un mapa de datos tridimensional de una superficie de palé inspeccionada, porque un procesador interpreta el mapa y produce una receta para el robot (14; 15), y porque el robot (14; 15) es capaz de agarrar el palé y transportarlo hacia uno o más de los puestos (97, 98, 150, 151) de reparación según la receta
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/AU2003/001652.
Solicitante: CHEP TECHNOLOGY PTY LIMITED.
Nacionalidad solicitante: Australia.
Dirección: LEVEL 40 GATEWAY 1 MACQUARIE PLACE SYDNEY, NSW 2000 AUSTRALIA.
Inventor/es: TOWNSEND,STEVE, LUCAS,MICHAEL,DAVID.
Fecha de Publicación: .
Fecha Solicitud PCT: 10 de Diciembre de 2003.
Fecha Concesión Europea: 28 de Julio de 2010.
Clasificación PCT:
- B23P19/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23P OTROS PROCEDIMIENTOS PARA EL TRABAJO DEL METAL NO PREVISTOS EN OTRO LUGAR; OPERACIONES MIXTAS; MAQUINAS HERRAMIENTAS UNIVERSALES (dispositivos para el copiado o el control B23Q). › B23P 19/00 Máquinas que efectúan simplemente el montaje o la separación de piezas metálicas u objetos entre ellos o de piezas metálicas con piezas no metálicas, implicando o no esto una cierta deformación; Herramientas o dispositivos a este efecto en la medida en que no estén previstos en otras clases (herramientas manuales en general B25). › para unir o separar piezas (B23P 19/10 tiene prioridad).
Clasificación antigua:
- B25J19/04 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 19/00 Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F). › para la visión.
- B65D19/31 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65D RECIPIENTES PARA EL ALMACENAMIENTO O EL TRANSPORTE DE OBJETOS O MATERIALES, p. ej. SACOS, BARRILES, BOTELLAS, CAJAS, LATAS, CARTONES, ARCAS, BOTES, BIDONES, TARROS, TANQUES; ACCESORIOS O CIERRES PARA RECIPIENTES; ELEMENTOS DE EMBALAJE; PAQUETES. › B65D 19/00 Pallets o plataformas análogas, con o sin paredes laterales, para soportar las cargas a elevar o a depositar (en los dispositivos de elevado o de bajada de mercancías pesadas o a granel, en las operaciones de carga o de descarga B66F 9/12). › hechas total o principalmente de madera.
- B65D19/38 B65D 19/00 […] › Detalles o accesorios.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre.
Fragmento de la descripción:
Esta invención se refiere a células y métodos de inspección y reparación automatizadas de palés del tipo de acuerdo con el preámbulo de las reivindicaciones 1 y 8, en los que unos palés inspeccionados son transportados hacia uno o más puestos desde un puesto de inspección automatizado, y se usa un mecanismo de agarre para mover palés.
Una célula y un método de inspección de palés automatizada del tipo anteriormente especificado se describen en el documento GB-A-2056681 para separar palés defectuosos de palés no defectuosos. Los palés que se han de inspeccionar se elevan de una pila y se mueven, uno cada vez, por un mecanismo sujetador hacia un puesto de inspección en donde se comprueba el cumplimiento de normas dimensionales. Se expulsa cualquier palé que se encuentre defectuoso para evitar su apilamiento con los palés no defectuosos.
La presente invención también se refiere a la reparación de palés y, más particularmente, es un objeto de la presente invención proporcionar células y métodos del tipo anteriormente descrito para la inspección y reparación automatizadas de palés en los que la inspección y reparación, que normalmente se realizan separada e independientemente una de otra, se automaticen de manera conjunta.
Según un aspecto de la invención, una célula de inspección y reparación automatizadas de palés del tipo mencionado antes especificado se caracteriza porque el puesto o puestos son puestos para la reparación de palés, porque el sujetador de palé está fijado a un brazo de un robot de ejes múltiples, porque el puesto de inspección es operativo para componer un mapa de datos tridimensional de una superficie de palé inspeccionada, porque un procesador interpreta el mapa y produce una receta para el robot, y porque el robot es capaz de agarrar el palé y transportarlo hacia uno o más de los puestos de reparación según la receta.
Según otro aspecto de la invención, un método de inspección y reparación de palés automatizada del tipo mencionado antes especificado se caracteriza porque el uno
o más puestos son puestos para la reparación de palés, porque se compila por el puesto de inspección un mapa de datos tridimensional de la superficie de palé inspeccionada, porque el mapa es interpretado por un procesador para producir una receta para la reparación del palé, y porque el sujetador de palé está fijado a un brazo de un robot de ejes múltiples para transportar el palé agarrado hacia uno o más de los puestos de reparación según la receta.
La invención es aplicable especialmente a la inspección y reparación automatizadas de palés de madera, y se ha de apreciar que las enseñanzas de la presente invención pueden extenderse a una variedad de estilos de palés. Asimismo, se apreciará que los diversos dispositivos y métodos de inspección y reparación descritos a continuación son capaces de uso por separado, teniendo cada uno de ellos utilidad sin el otro, pero siendo particularmente útiles cuando se usan según cualquiera de diversas combinaciones.
Los palés de madera pueden construirse en dos estilos básicos, estando compuesto el primero por tres (o más) montantes o largueros, con unas tablas que corren a través de las partes superior e inferior de estos para formar una plataforma a fin de soportar productos. Las tablas están generalmente clavados sobre los montantes, pero pueden estar atornillados sobre los mismos o estar fijados por otros métodos. Las tablas primera y última de un lado dado se denominan tablas delanteros. El segundo estilo es similar, pero tiene bloques y tablas conectores en vez de los montantes. Los palés de ambos estilos pueden construirse en una variedad de tamaños dependiendo de su uso y situación geográfica. Los palés también pueden construirse con otros materiales, tales como plástico, metal, materiales compuestos o una combinación de materiales.
Los palés (de cualquier estilo) pueden repararse cuando resulten dañados. Esta reparación requiere tradicionalmente una manipulación e inspección manuales por un operador, con sistemas mecanizados disponibles para mover el palé hacia y desde el operador humano que completa la reparación del palé. Adicionalmente, existe en ocasiones un requisito separado para la inspección de palés (de cualquier estilo) conforme a normas y criterios de calidad a fin de determinar que éstos son adecuados para su uso – esto es actualmente también un proceso manual.
La invención proporciona diversos dispositivos y métodos para la inspección y reparación automatizadas de palés. En realizaciones preferidas, se agarra un palé por un dispositivo de agarre interno o externo. El dispositivo de agarre está diseñado para dar acceso a las áreas reparables del palé. Un robot usa el dispositivo de agarre para mover el palé desde un puesto hasta el siguiente. Cada puesto realiza una operación necesaria para la inspección o reparación.
Con el fin de que la invención se comprenda mejor se hace ahora referencia a las siguientes figuras de los dibujos, en las cuales:
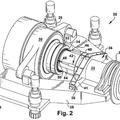
La figura 1 es una vista en perspectiva de una célula de inspección y reparación automatizadas; La figura 2 es una vista en perspectiva de una célula diferente de inspección y reparación que tiene diversos puestos;
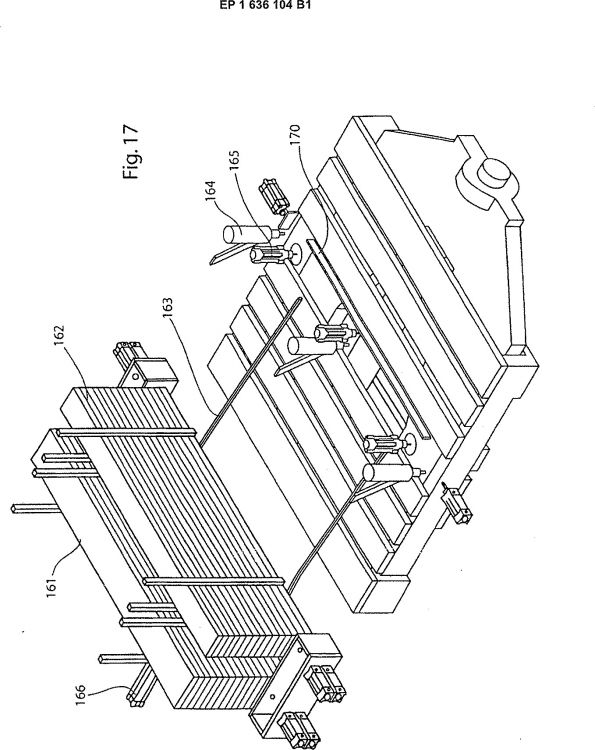
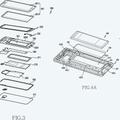
La figura 3 es una vista en perspectiva de un dispositivo de agarre de palé; La figura 4 es una vista en perspectiva de un dispositivo de agarre de palé alternativo; La figura 5 es una vista en perspectiva de un dispositivo de agarre de palé adicional; Las figuras 6(a) y 6(b) son vistas en perspectiva de un sujetador interno; La figura 7 es una vista en perspectiva de un sujetador externo; La figura 8 es una vista en perspectiva de una mesa de inspección; La figura 9 es una vista en perspectiva de una porción de la célula mostrada en la figura 1; La figura 10 es una vista en perspectiva de una sierra de desmontaje de tablas; La figura 11 es otra vista en perspectiva de una sierra de desmontaje de tablas; La figura 12 es aún otra vista en perspectiva de una sierra de desmontaje de tablas; La figura 13 es una vista en perspectiva de unos sensores de posición de cuchilla en una sierra de desmontaje de tablas; Las figuras 14 (a)-(c) son alzados de un sierra de desmontaje de tablas que muestran el posicionamiento del palé antes de una operación de corte; La figura 15 es una vista en perspectiva de otra porción de de la célula mostrada en la figura 1; La figura 16 es un alzado lateral de una máquina de reemplazo de tablas; y La figura 17 es una vista en perspectiva de una máquina de reemplazo de tablas.
Visión general
Según se muestra en la figura 1, un ejemplo de una célula 10 de trabajo robotizada para inspección y reparación de palés comprende un transportador de entrada opcional 11 que entrega unos palés 12 a un área de descarga 13. El transportador 11 es capaz de adoptar una serie de formas y estilos diferentes. En este ejemplo, la célula de inspección y reparación 10 incluye un primer robot 14 y un segundo robot 15. Los dos robots 14, 15 funcionan conjuntamente para transportar un palé a través de una serie de puestos. Cada puesto realiza uno o más operaciones que son necesarias durante el proceso de inspección y reparación. En algunas realizaciones de la invención, un solo robot colocado centralmente dentro de un célula o circuito de puestos (véase figura 2) es capaz de transportar un palé a través de todo el ciclo de inspección y reparación. En el ejemplo de la figura 1, el primer robot 14 transporta un palé a través de un dispositivo de inspección automatizada 16 y de una sierra 17 de desmontaje de tablas dañadas antes de entregar el palé al segundo robot 15. El segundo robot 15 inserta el mismo palé en un puesto 18 de ajuste de tabla de guía y en un puesto 19 de reemplazo de tabla antes de cargar el palé sobre un segundo transportador (no mostrado) para retirar de la célula la tabla inspeccionada y reparada.
Según se muestra en la figura 2, un palé puede llegar a una célula 20 de inspección y reparación de robot básico o sencillo, por cualesquiera medios (por ejemplo, carretilla elevadora, transportador, dispensador de palés). Esta célula de reparación puede adoptar una serie de configuraciones, pero en este caso particular la célula es esencialmente un circuito continuo que comienza en el transportador de entrada 21 y finaliza en el transportador de salida 22. Cuando el palé ha llegado a la célula, éste debe ser agarrado antes de que puedan tener lugar operaciones adicionales. El agarre se logra con un brazo 23...
Reivindicaciones:
1. Una célula de inspección y reparación automatizadas de palés, en la que unos palés inspeccionados son transportados hacia uno o más puestos (97, 98, 150, 151) desde un puesto (16) de inspección automatizada, y se usa un sujetador (30; 40; 50; 60; 70) de palés para mover palés, caracterizada porque el puesto o puestos son puestos (97, 98, 150, 151) para la reparación de palés, porque el sujetador de palé está fijado a un brazo de un robot (14; 15) de ejes múltiples, porque el puesto (16) de inspección es operativo para componer un mapa de datos tridimensional de una superficie de palé inspeccionada, porque un procesador interpreta el mapa y produce una receta para el robot (14; 15), y porque el robot (14; 15) es capaz de agarrar el palé y transportarlo hacia uno o más de los puestos (97, 98, 150, 151) de reparación según la receta.
2. La célula según la reivindicación 1, en la que un puesto de reparación es un puesto (97) de retirada de tablas que comprende una sierra (104) de cinta que está adaptada para separar un tabla clavada de un palé a la cual está fijada la tabla.
3. La célula según la reivindicación 2, en la que el puesto (97) de retirada de tablas comprende además un dispositivo (98) de alzado de tablas para retirar tablas que la sierra (104) no puede retirar.
4. La célula según la reivindicación 2 o 3, que incluye un dispositivo (151) de reemplazo de tablas.
5. La célula según una cualquiera de las reivindicaciones 2 a 4, que incluye un dispositivo (151) de ajuste de tablas de guía.
6. La célula según una cualquiera de las reivindicaciones 1 a 5, que incluye un segundo brazo robotizado (15) de ejes múltiples que coopera con el brazo robotizado
(14) de ejes múltiples mencionado en primer lugar de modo que un palé sea manipulado por ambos brazos robotizados a medida que atraviese la célula.
7. La célula según la reivindicación 6, en la que uno de los brazos robotizados finaliza en un sujetador (40; 70) de palé externo y el otro brazo robotizado finaliza en un sujetador (30; 50; 60) de palé interno.
8. Un método de inspección y reparación automatizadas de palés, en el que unos palés inspeccionados son transportados hacia uno o más puestos (97, 98, 150, 151) desde un puesto (16) de inspección automatizada, y se usa un sujetador (14; 15) de palés para mover palés, caracterizado porque el puesto o puestos son puestos (97, 98, 150, 151) para la reparación de palés, porque el puesto (16) de inspección compone un mapa de datos tridimensional de una superficie de palé inspeccionada, porque un procesador interpreta el mapa para producir una receta para la reparación del palé, y porque el sujetador (14; 15) de palés está fijado a una brazo de un robot (14; 15) de ejes múltiples para transportar el palé agarrado a uno o más de los puestos de reparación (97, 98, 150, 151) según la receta.
9. El método según la reivindicación 8, en el que un dispositivo de exploración del puesto (16) de inspección comprende una haz de láser que se proyecta sobre el palé para proporcionar el mapa, y el mapa es una mapa de datos tridimensional usado para detectar huecos y salientes, filtrándose los datos tridimensionales en forma de una imagen bidimensional de valores encendido/apagado mediante el uso de un valor de altura creado dinámicamente correspondiente a una plano de referencia o desviación umbral establecida por encima del montante o superficie de tabla conectora del palé.
20 10. El método según la reivindicación 9, en el que los datos tridimensionales se filtran mediante filtros de Sobel o Gauss para proporcionar ubicaciones de salientes, grietas y otras desviaciones presentes en las superficies de elementos de palé.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
HERRAMENTAL PARA ENSAMBLE DE PLATO Y AISLADOR DE RESORTE EN UN SISTEMA DE SUSPENSIÓN, del 2 de Abril de 2020, de SEERAUBER AUTOMOTIVE DE MÉXICO, S.A.P.I. DE C.V: Un herramental para ensamblar un plato y un aislador de resorte en un sistema de suspensión, que consiste en un cuerpo que comprende, en su cara superior, […]
Procedimiento para instalar perfiles de junta de estanqueidad con una capa adhesiva sobre carrocerías de vehículos o sus partes y mecanismo de aplicación para llevar a cabo el procedimiento, del 19 de Febrero de 2020, de Tesla Grohmann Automation GmbH: Procedimiento para instalar perfiles de junta de estanqueidad con una capa adhesiva sobre carrocerías de vehículos o sus partes con un mecanismo de aplicación , […]
Dispositivo y método para montar un perfil de goma o perfil de sellado, del 8 de Enero de 2020, de AyTec Automation GmbH: Dispositivo para aplicar un perfil de sellado a una superficie , que comprende un dispositivo de manipulación que comprende un brazo robótico para mover y guiar […]
Dispositivo, sistema y método para el desprendimiento automático de un elemento adhesivo desde un elemento de soporte, del 11 de Diciembre de 2019, de SIKA TECHNOLOGY AG: Dispositivo para el desprendimiento automático de un elemento adhesivo desde un elemento de soporte que se extiende a lo largo de un plano de extensión principal, […]
Aparato de cocción calentado a gas, del 20 de Noviembre de 2019, de BSH HAUSGERÁTE GMBH: Aparato de cocción calentado a gas con al menos una válvula de gas que presenta un empalme , con un conducto de gas que está conectado con el empalme […]
 Procedimiento y sistema para desacoplar un acoplamiento retráctil en un aerogenerador, del 30 de Octubre de 2019, de GENERAL ELECTRIC COMPANY: Procedimiento para desacoplar un acoplamiento retráctil que sujeta un eje a un componente de un tren de transmisión en un aerogenerador […]
Procedimiento y sistema para desacoplar un acoplamiento retráctil en un aerogenerador, del 30 de Octubre de 2019, de GENERAL ELECTRIC COMPANY: Procedimiento para desacoplar un acoplamiento retráctil que sujeta un eje a un componente de un tren de transmisión en un aerogenerador […]
 Dispositivo electrónico que incluye una estructura de separación de componentes, del 28 de Agosto de 2019, de SAMSUNG ELECTRONICS CO., LTD.: Un dispositivo electrónico que comprende:
una carcasa que incluye una primera superficie y una segunda superficie alejada […]
Dispositivo electrónico que incluye una estructura de separación de componentes, del 28 de Agosto de 2019, de SAMSUNG ELECTRONICS CO., LTD.: Un dispositivo electrónico que comprende:
una carcasa que incluye una primera superficie y una segunda superficie alejada […]