PROCEDIMIENTO Y DISPOSITIVO DE ESTIMACION DE UNA TRAYECTORIA DESCRITA POR UN VEHICULO.
Procedimiento de estimación de una trayectoria descrita por un objeto móvil (15),
a partir de una sucesión de posiciones geográficas obtenidas con relación a dicho objeto, comprendiendo el procedimiento:
- una etapa de determinación de un valor de velocidad (V(k)) de desplazamiento de dicho objeto a partir de una posición actual (P(k)) y de una posición anterior (P(k-1)),
- una etapa de determinación de una recta actual (DC(k)) que es, según el valor de velocidad determinado, bien una primera recta (DI(k)) definida por dicha posición actual y dicha posición anterior, o bien una segunda recta (DR(k)) obtenida mediante aproximación lineal de un conjunto que comprende por lo menos dos posiciones, incluyendo dicha posición actual y una posición anterior
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2007/052225.
Solicitante: FRANCE TELECOM.
Nacionalidad solicitante: Francia.
Dirección: 6 PLACE D'ALLERAY,75015 PARIS.
Inventor/es: LAUGIER,ALEXANDRE, PARIS,JEAN-PIERRE, PICARD,MICHEL.
Fecha de Publicación: .
Fecha Concesión Europea: 31 de Marzo de 2010.
Clasificación Internacional de Patentes:
- G01S5/02T
Clasificación PCT:
- G01S5/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › usando ondas de radio (G01S 19/00 tiene prioridad).
Fragmento de la descripción:
Procedimiento y dispositivo de estimación de una trayectoria descrita por un vehículo.
La invención se refiere al campo técnico general de la localización y del seguimiento de entidades móviles. Más en particular, se refiere a un procedimiento y dispositivo de estimación de una trayectoria descrita por un objeto móvil, en particular un vehículo.
Una solución de localización conocida es la que ha desarrollado la compañía Quantic® para los automóviles. Esta solución reside en la utilización de la información de velocidad Y de rumbos proporcionada por el sistema GPS (Global Positioning System) para efectuar el seguimiento de un automóvil y determinar diferentes parámetros de la trayectoria seguida por esta entidad.
El procedimiento de determinación procede a una integración de la medición de velocidad proporcionada por el GPS con el fin de aproximar la trayectoria de la entidad en movimiento. La puesta en práctica del mismo es relativamente compleja. No puede ponerse en práctica en un dispositivo con escasos recursos, tal como un teléfono móvil.
Además, el procedimiento de determinación de la trayectoria utilizado en esta solución depende de la información proporcionada por el GPS, detectándose, por ejemplo, los cambios de dirección sólo gracias a la información de rumbo proporcionada. Por tanto, este procedimiento de aproximación de trayectoria no es de aplicación al caso en el que la información proporcionada es una simple información de posición.
Se hace manifiesta por tanto una necesidad de proporcionar una solución simple de seguimiento de una entidad móvil, que permita aproximar la trayectoria seguida por esa entidad a partir de posiciones geográficas que esa entidad ocupa sucesivamente y susceptible de ponerse en práctica en un dispositivo con escasos recursos de cálculo y/o de memoria, tal como un teléfono móvil.
La invención se refiere a un procedimiento de estimación de una trayectoria descrita por un objeto móvil, a partir de una sucesión de posiciones geográficas obtenidas con relación a dicho objeto, comprendiendo el procedimiento:
- una etapa de determinación de un valor de velocidad de desplazamiento de dicho objeto a partir de una posición actual y de una posición anterior,
- una etapa de determinación de una recta actual que es, según el valor de velocidad determinado, bien una primera recta definida por dicha posición actual y dicha posición anterior, o bien una segunda recta obtenida mediante aproximación lineal de un conjunto que comprende por lo menos dos posiciones, incluyendo dicha posición actual y una posición anterior.
El procedimiento permite aproximar de forma simple, en particular por medio de un conjunto de rectas, la trayectoria del objeto en seguimiento, todo ello tan sólo a partir de posiciones geográficas obtenidas con relación al objeto móvil. En efecto, las técnicas de aproximación lineales de un conjunto de puntos son simples de poner en práctica. A continuación se puede reconstituir la trayectoria a partir de segmentos de recta pertenecientes a las rectas deter- minadas.
Además, la aproximación de la trayectoria mediante rectas se opera, para un determinado punto de la trayectoria, teniendo en cuenta la velocidad del objeto en ese punto de la trayectoria. El procedimiento de aproximación según la invención reside efectivamente en la comprobación de que cuanto más despacio circula un vehículo, más susceptible es la trayectoria que éste efectúa de incorporar cambios de dirección rápidos y/o amplios. De acuerdo con la invención, la recta actual elegida para la aproximación de la trayectoria en el punto actual y, con ello, la modalidad de aproximación para ese punto, es función de la velocidad del objeto. Por tanto, es posible simplemente adaptar la precisión de la aproximación a la posible sinuosidad de la trayectoria del objeto.
De acuerdo con una forma de realización del procedimiento según la invención, cuando el valor de velocidad determinado es superior a un primer umbral de velocidad, el procedimiento comprende una etapa de determinación de un valor de ángulo asociado al valor de velocidad y de una diferencia de ángulo de pendiente entre la primera y la segunda recta, correspondiendo la recta actual a la segunda recta cuando dicha diferencia es inferior al valor de ángulo determinado y, a la segunda recta, cuando dicha diferencia es superior al valor de ángulo asociado.
Con ello es posible determinar, en función de la sinuosidad efectiva de la trayectoria, cuál es la modalidad de aproximación más adecuada.
De acuerdo con una forma de realización, el procedimiento según la invención comprende una etapa inicial de memorización de una escala de valores de umbral de velocidad de desplazamiento de dicho objeto y de un valor de ángulo asociado a cada intervalo de valores de velocidad que separa dos valores de umbral sucesivos, estando el valor de ángulo determinado constituido por el valor de ángulo asociado al intervalo de valores de umbral en el que se encuentra el valor de velocidad determinado. De este modo, se puede comparar la sinuosidad efectiva de la trayectoria con la velocidad de la trayectoria, con el fin de determinar cuál es la recta más adecuada para la aproximación de la trayectoria. En consecuencia, la precisión de los cálculos y, por tanto, los recursos de cálculo necesarios, están adaptados a las características efectivas de la trayectoria. se mejora la relación precisión/coste.
De acuerdo con una forma de realización del procedimiento según la invención, cuando el valor de velocidad determinado es inferior al primer umbral de velocidad, la recta actual es la primera recta.
De acuerdo con una forma de realización del procedimiento según la invención, las posiciones geográficas obtenidas con relación al objeto móvil se deducen de las posiciones geográficas de un terminal móvil de telecomunicaciones proporcionadas por una red de telecomunicación a la que accede dicho terminal. Esta forma de realización es por tanto especialmente conveniente para una puesta en práctica poco costosa de la invención.
Como corolario, la invención se refiere a un dispositivo de estimación de una trayectoria descrita por un objeto, a partir de una sucesión de posiciones geográficas obtenidas con relación a dicho objeto, comprendiendo el dispositivo:
- medios de determinación de un valor de velocidad de desplazamiento de dicho objeto a partir de una posición actual y de una posición anterior,
- medios de determinación de una recta actual que es, según el valor de velocidad determinado, bien una primera recta definida por dicha posición actual y dicha posición anterior, o bien una segunda recta obtenida mediante aproximación lineal de un conjunto que comprende por lo menos dos posiciones, incluyendo dicha posición actual y dicha posición anterior.
De acuerdo con una forma de realización, el dispositivo según la invención comprende medios para acceder a una red de telecomunicación, deduciéndose dichas posiciones geográficas de las posiciones geográficas de un terminal móvil de telecomunicaciones proporcionadas por esa red.
El dispositivo según la invención va integrado ventajosamente en un terminal de telecomunicaciones. De esta manera, es posible estimar la trayectoria de cualquier entidad móvil solidaria con un terminal móvil. Como alternativa, el dispositivo según la invención se integra en un servidor de procesamiento de datos conectado con una red de telecomunicaciones por cuyo intermedio se obtienen las posiciones geográficas de un terminal móvil que accede a esta red.
La invención tiene asimismo por objeto un soporte de grabación que comprende un programa que incorpora instrucciones de programa para la puesta en práctica de las etapas del procedimiento según la invención cuando se carga y ejecuta dicho programa en un sistema informático.
Otros objetivos, características y ventajas de la invención se pondrán de manifiesto a través de la siguiente descripción, dada únicamente a título de ejemplo no limitativo y hecha mediante referencia a los dibujos que se adjuntan, en los que:
la figura 1 representa de forma esquemática un sistema adaptado a la puesta en práctica de la invención,
la figura 2 ilustra algunas de las etapas del procedimiento según la invención, y
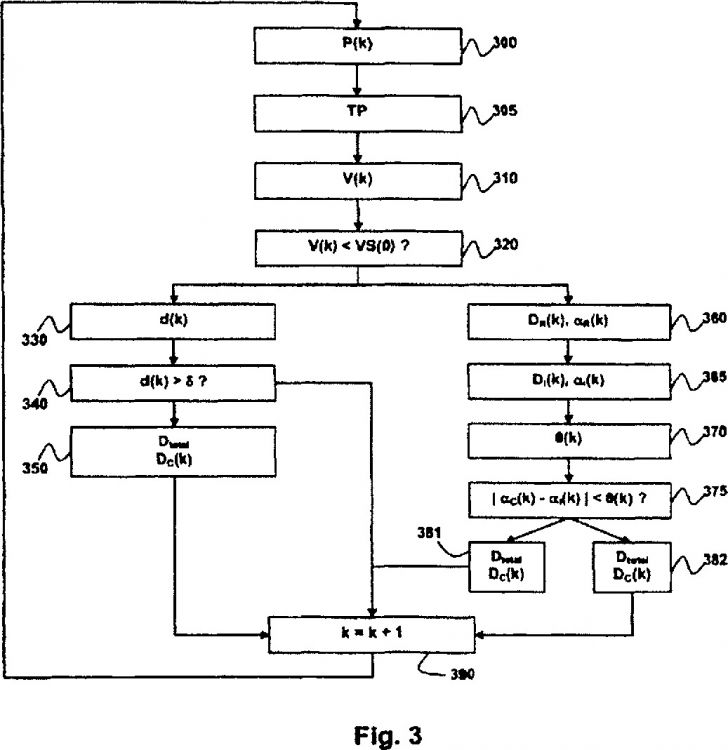
la figura 3 es un diagrama de flujo de una forma de realización del procedimiento según la invención.
La invención...
Reivindicaciones:
1. Procedimiento de estimación de una trayectoria descrita por un objeto móvil (15), a partir de una sucesión de posiciones geográficas obtenidas con relación a dicho objeto, comprendiendo el procedimiento:
- una etapa de determinación de un valor de velocidad (V(k)) de desplazamiento de dicho objeto a partir de una posición actual (P(k)) y de una posición anterior (P(k-1)),
- una etapa de determinación de una recta actual (DC(k)) que es, según el valor de velocidad determinado, bien una primera recta (DI(k)) definida por dicha posición actual y dicha posición anterior, o bien una segunda recta (DR(k)) obtenida mediante aproximación lineal de un conjunto que comprende por lo menos dos posiciones, incluyendo dicha posición actual y una posición anterior.
2. Procedimiento según la reivindicación 1, en el que, cuando el valor de velocidad determinado es superior a un primer umbral de velocidad (VS(0)), el procedimiento comprende una etapa de determinación de un valor de ángulo (?(k)) asociado al valor de velocidad y de una diferencia de ángulo de pendiente entre la primera y la segunda recta, correspondiendo la recta actual a la segunda recta cuando dicha diferencia es inferior al valor de ángulo determinado y, a la segunda recta, cuando dicha diferencia es superior al valor de ángulo asociado.
3. Procedimiento según la reivindicación 2, que comprende una etapa inicial de definición de una escala de valores de umbral de velocidad de desplazamiento (VS(i)) de dicho objeto y de un valor de ángulo (?(i)) asociado a cada intervalo de valores de velocidad ([VS(i), VS(i+1)[) que separa dos valores de umbral sucesivos,
estando el valor de ángulo determinado (?(k)) constituido por el valor de ángulo (?(i)) asociado al intervalo de valores de umbral en el que se encuentra el valor de velocidad (V(k)) determinado.
4. Procedimiento según una cualquiera de las reivindicaciones 2 a 3, en el que, cuando el valor de velocidad determinado es inferior al primer umbral de velocidad (VS(0)), la recta actual es la primera recta.
5. Procedimiento según una cualquiera de las reivindicaciones 1 a 4, deduciéndose dichas posiciones geográficas de las posiciones geográficas de un terminal móvil de telecomunicaciones proporcionadas por una red de telecomunicación a la que accede dicho terminal.
6. Dispositivo de estimación de una trayectoria descrita por un objeto (15), a partir de una sucesión de posiciones geográficas obtenidas con relación a dicho objeto, comprendiendo el dispositivo:
- medios de determinación de un valor de velocidad (V(k)) de desplazamiento de dicho objeto a partir de una posición actual (P(k)) y de una posición anterior (P(k-1)),
- medios de determinación de una recta actual (DC(k)) que es, según el valor de velocidad determinado, bien una primera recta (DI(k)) definida por dicha posición actual y dicha posición anterior, o bien una segunda recta (DR(k)) obtenida mediante aproximación lineal de un conjunto que comprende por lo menos dos posiciones, incluyendo dicha posición actual y dicha posición anterior.
7. Dispositivo según la reivindicación 6, que comprende medios para acceder a una red de telecomunicación, deduciéndose dichas posiciones geográficas de las posiciones geográficas de un terminal móvil de telecomunicaciones proporcionadas por esa red.
8. Terminal de telecomunicaciones (10, 30) que comprende un dispositivo según la reivindicación 7.
9. Servidor de procesamiento de datos (20), que comprende un dispositivo según la reivindicación 7, estando el dispositivo conectado a dicha red de telecomunicaciones y siendo apto para recibir, a través de dicha red, dichas posiciones geográficas de dicho terminal móvil de telecomunicaciones.
10. Soporte de grabación que comprende un programa que comprende instrucciones de programa para la puesta en práctica de las etapas del procedimiento según una cualquiera de las reivindicaciones 1 a 5 cuando se carga y ejecuta dicho programa en un sistema informático.
Patentes similares o relacionadas:
Método y sistema computarizados de seguimiento y advertencia de proximidad para el personal, la planta y el equipo que funcionan tanto por encima como por debajo del suelo o su movimiento entre ellos, del 1 de Julio de 2020, de EMB Safety Helmet Pty Ltd: Un sistema informatizado de advertencia de proximidad y seguimiento de seguridad para el personal , la planta y el equipo […]
CASCO INTELIGENTE PARA MOTOS, del 19 de Junio de 2020, de JURADO SECO, Sacha: 1. Casco inteligente para motos, caracterizado porque está formado por un casco de moto con conectividad, que incorpora un micrófono , auriculares , cámaras de […]
Método y dispositivo para mejorar la determinación de la posición, del 27 de Mayo de 2020, de DEUTSCHE TELEKOM AG: Método para mejorar la determinación de la posición de un dispositivo de comunicación móvil, con las siguientes etapas de método: a) proporcionar una información […]
Localización de una baliza de emergencia, del 20 de Mayo de 2020, de THALES: Un procedimiento implementado por ordenador para procesar la señal transmitida por una baliza de emergencia, siendo recibida dicha señal por […]
MÉTODO PARA DETERMINAR EL MODO DE TRANSPORTE DE UNA POBLACIÓN A PARTIR DE DATOS DE FACTURACIÓN DE SERVICIOS MÓVILES, del 14 de Mayo de 2020, de UNIVERSIDAD DEL DESARROLLO: La presente invención se relaciona al campo de los sistemas y métodos para procesamiento de datos, más específicamente con métodos de procesamiento de datos con […]
Procedimiento y sistema de geolocalización para el cálculo directo de elementos de desplazamiento, del 13 de Mayo de 2020, de THALES: Procedimiento para determinar la posición de uno o varios objetos susceptibles de desplazarse en una red, estando dotados uno o varios objetos […]
Dispositivo, sistema y procedimiento de lector de etiquetas de datos portátil para identificar la localización de una etiqueta de datos, del 1 de Abril de 2020, de SYMBOL TECHNOLOGIES, LLC: Procedimiento para identificar la localización de una etiqueta de datos portátil, comprendiendo el procedimiento: leer la etiqueta de datos […]
Ubicación de la posición para sistemas de comunicación inalámbrica, del 11 de Marzo de 2020, de QUALCOMM INCORPORATED: Un procedimiento, que comprende: recibir una señal piloto de ubicación de la posición desde una estación base en una estación móvil , la señal piloto de ubicación […]