EQUIPO DE CONTROL DIMENSIONAL.
Equipo de control dimensional.
Permite efectuar controles de calidad sobre piezas mecanizadas tales como tornillos,
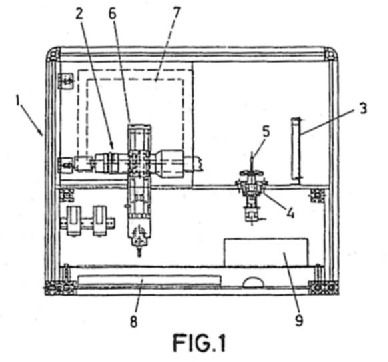
bulones, pasadores u otros objetos (5). El equipo (1) comprende una cámara negra inmune a contaminación lumínica externa que incluye un soporte (4) sobre el que se coloca dicho objeto (5), una lámpara de iluminación (3) ubicada tras el soporte (4), y una cámara de toma de imágenes (2) ubicada delante del soporte (4) y montada en un dispositivo de desplazamientos (6); comprendiendo además el equipo (1) un ordenador (9) con monitor (7) y teclado (8) para control de funciones de dicho equipo (1)
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200602555.
Solicitante: CONSTRUCICONES MECANICAS JOSE LAZPIUR S.A.
Nacionalidad solicitante: España.
Provincia: GUIPÚZCOA.
Inventor/es: LAZPIUR LAMARIANO,MIGUEL MARTIN.
Fecha de Solicitud: 9 de Octubre de 2006.
Fecha de Publicación: .
Fecha de Concesión: 21 de Enero de 2010.
Clasificación Internacional de Patentes:
- G01B11/24 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para la medida de contornos o curvaturas.
Clasificación PCT:
Fragmento de la descripción:
Equipo de control dimensional.
Objeto de la invención
La presente invención, tal y como se expresa en el enunciado de esta memoria descriptiva, se refiere a un equipo de control dimensional cuya finalidad consiste en facilitar un equipo para control dimensional de piezas, tanto de revolución como irregulares, pudiendo determinar características de las piezas relativas tanto a su tamaño como a su superficie, siendo capaz de apreciar golpes, excesos de baño, u otros defectos, con lo que se facilita un control de calidad sobre piezas mecanizadas tales como tornillos, bulones, pasadores u otros objetos, de manera sencilla, fiable y altamente automatizada.
Antecedentes de la invención
En los procesos de fabricación se necesita habitualmente controlar la calidad de las piezas obtenidas, siendo necesaria en muchos casos la determinación de parámetros tales como el tamaño y la superficie de dichas piezas. Tradicionalmente, para la medición de las piezas se utilizan diferentes aparatos manuales, tales como relojes, proyector de perfiles, pie de rey u otros que obligan a cambiar de útil para cada sección a medir (longitud, radio, arco), lo cual implica inconvenientes relativos a unos tiempos elevados de medición y a que el análisis de la superficie que se realiza por inspección visual requiere una gran experiencia y habilidad del operador correspondiente.
Existen otros dispositivos más avanzados de medición de piezas, que utilizan rayos láser que inciden sobre la pieza y miden sus dimensiones, dándose en este caso inconvenientes relativos a que sólo analizan el contorno de la pieza en función de los rayos ocluidos. Además estos equipos tienen un precio elevado y a su vez son muy delicados. Por otra parte, hay equipos de visión artificial que utilizan bien cámaras de baja resolución o bien lentes convencionales que deforman la imagen y hacen que las medidas no sean suficientemente precisas. Dichos equipos presentan un único foco o fuentes de lectura que crea un cono de visión con distorsiones en las lecturas realizadas en la parte superior e inferior de dicho foco, produciéndose errores de medición en estas zonas.
Otras técnicas de medición de piezas utilizan luces que se proyectan sobre las piezas a medir, determinando su tamaño mediante sensores que actúan en función de los rayos absorbidos, presentándose en estos casos inconvenientes relativos a que la cantidad de datos recogidos hace que se requieran complejos sistemas de procesamiento de datos que encarecen notablemente los correspondientes sistemas.
Descripción de la invención
Para lograr los objetivos y evitar los inconvenientes indicados anteriormente, la invención consiste en un equipo de control de calidad que permite efectuar controles de calidad sobre piezas mecanizadas tales como tornillos, bulones, pasadores u otros objetos.
Novedosamente, según la invención, el equipo correspondiente comprende una cámara negra inmune a contaminación lumínica externa que incluye un soporte sobre el que se coloca dicho objeto, una lámpara de iluminación ubicada tras el soporte, y una cámara de toma de imágenes ubicada delante del soporte y montada en un dispositivo de desplazamiento; comprendiendo además el equipo un ordenador con monitor y teclado para control de funciones de dicho equipo.
Según una realización preferente de la invención, el referido ordenador incluye funcionalmente al menos un elemento de control de desplazamiento que permite mover la cámara y cuya señal se recibe en una tarjeta digitalizadora para su procesamiento, en el que primero se genera una matriz de imágenes obteniendo una única imagen virtual de toda la pieza sobre la que se le aplican los algoritmos de medida desarrollados.
El dispositivo de desplazamiento en el que se ubica la cámara de toma de imágenes presenta capacidad de desplazamiento vertical y/o horizontal. En general, la luz es suficientemente larga como para que no necesite ser movida.
Además, según la realización preferente de la invención, el referido dispositivo de desplazamiento se mueve en un intervalo máximo que está en función de la resolución de la lente de la cámara de toma de imágenes al objeto de evitar el efecto cono y los errores de lectura dimensional que dicho efecto produciría.
Por otra parte, el referido soporte puede presentar capacidad de rotar y de ajuste en sus grados de revolución en función del tipo de objeto a examinar.
Además, el soporte rotatorio es susceptible de incorporar indicadores de posición para la colocación del objeto a examinar.
Para determinados casos en los que no interese medir toda la revolución de la pieza, este soporte también puede ser fijo.
Según la realización preferente de la invención, la aludida lámpara de iluminación es una lámpara de tipo "blacklight" con una luz de LEDs de tipo continuo de color rojo, siendo su tamaño superior al del objeto a examinar.
La alimentación del objeto a examinar sobre el soporte rotatorio y su retirada del mismo se puede efectuar manualmente y/o automáticamente con brazo de robot o dispositivo análogo.
Con la estructura que se ha descrito, el equipo de la invención presenta ventajas relativas a su robustez, fiabilidad y precisión para efectuar controles de calidad sobre muy diversas piezas, siendo además de un coste 4 relativamente bajo y de fácil utilización. Además, el equipo presenta ventajas tales como la posibilidad de medir las dimensiones de la pieza, longitud, diámetro, radio, punta, ángulo y otros análisis más complejos tales como concentricidad, perpendicularidad u otros, y en el caso de roscas, número de filetes, paso de rosca, ángulo de rosca, diámetros exterior e interior y otros parámetros sin necesidad de hacer comparaciones con una pieza patrón, pudiendo además medir el equipo de la invención defectos superficiales como golpes o excesos de baño, en cualquier tipo de pieza sea ésta de revolución o no y para cualquier material que constituya a la pieza. Otra ventaja del equipo de la invención consiste en que elimina el efecto cono y los errores de lectura consecuentes que se producen en otros dispositivos.
El equipo de la invención puede integrarse en un sistema informático de empresa y conectarse a la red de la misma.
A continuación, para facilitar una mejor comprensión de esa memoria descriptiva y formando parte integrante de la misma, se acompañan unas figuras en las que con carácter ilustrativo y no limitativo se ha representado el objeto de la invención.
Breve descripción de las figuras
Figura 1.- Representa una vista en alzado de un equipo de control de calidad realizado según la presente invención, mostrando sus componentes.
Figura 2.- Representa una vista en planta del equipo de la anterior figura 1.
Figura 3.- Representa un diagrama de bloques funcionales del equipo de las anteriores figuras.
Descripción de un ejemplo de realización de la invención
Seguidamente se realiza una descripción de un ejemplo de la invención haciendo referencia a la numeración adoptada en las figuras.
Así, el equipo de control de calidad del presente ejemplo consiste en un equipo 1 para control dimensional que consta de una cámara de visión artificial 2, una lámpara 3 y un soporte 4 para colocar la pieza 5 a inspeccionar. La cámara 2 está colocada sobre un dispositivo de desplazamiento vertical 6, moviéndose en un intervalo máximo según la resolución de la lente de la cámara (pixeles), evitándose así el efecto cono de la lente en las áreas superior e inferior respecto de una zona central de enfoque de la lente, y consecuentemente evitando los errores de lectura dimensional que generaría dicho efecto. Para piezas en las que su ancho sea superior a la resolución de la cámara 2, y según otras realizaciones de la invención, además del desplazamiento vertical, o en lugar de éste, dicha cámara 2, puede situarse sobre un dispositivo de desplazamiento horizontal. Los aludidos elementos referenciados numéricamente pueden apreciarse en las figuras 1 y 2.
La pieza a analizar 5 se sitúa sobre el soporte 4 del equipo 1, pudiendo tener este soporte 4 la capacidad de girar sobre su eje para permitir la lectura de toda la pieza 5, pudiendo ajustarse los grados de revolución del soporte 4 según el tipo de pieza, y pudiendo llevar dicho soporte 4 indicadores de posición para la colocación de la pieza.
La lámpara 3 que se emplea es de tipo "blacklight", siendo una luz de LEDs de tipo continuo...
Reivindicaciones:
1. Equipo de control dimensional, que permite efectuar controles de calidad sobre piezas mecanizadas tales como tornillos, bulones, pasadores u otros objetos (5); caracterizado porque el equipo (1) comprende una cámara negra inmune a contaminación lumínica externa que incluye un soporte (4) sobre el que se coloca dicho objeto (5), una lámpara de iluminación (3) ubicada tras el soporte (4), y una cámara de toma de imágenes (2) ubicada delante del soporte (4) y montada en un dispositivo de desplazamiento (6); comprendiendo además el equipo (1) un ordenador (9) con monitor (7) y teclado (8) para control de funciones de dicho equipo (1).
2. Equipo de control dimensional, según la reivindicación 1, caracterizado porque el ordenador (9) incluye funcionalmente al menos un bloque de lectura desplazamiento (10) y una tarjeta digitalizadora (11) que recibe señal de la cámara (2) conectada a su vez a un bloque de generación de una matriz de imágenes (12) que se encuentra unido a un procesador de imagen virtual (13) conectado a un bloque de análisis y medición de la imagen virtual (14) mediante la aplicación de algoritmos de medida.
3. Equipo de control dimensional, según la reivindicación 1, caracterizado porque dicho dispositivo de desplazamiento (6) presenta capacidad de desplazamiento vertical y/o horizontal.
4. Equipo de control dimensional, según la reivindicación 1, caracterizado porque dicho dispositivo de desplazamiento (6) se mueve en un intervalo máximo que está en función de la resolución de la lente de la cámara de toma de imágenes (2) al objeto de evitar el efecto cono y los errores de lectura dimensional que dicho efecto produciría.
5. Equipo de control dimensional, según la reivindicación 1, caracterizado porque dicho soporte (4) presenta capacidad de rotar y de ajuste en sus grados de revolución en función del tipo de objeto a examinar (5).
6. Equipo de control dimensional, según la reivindicación 1, caracterizado porque dicho soporte rotatorio (4) es susceptible de incorporar indicadores de posición para la colocación del objeto a examinar (5).
7. Equipo de control dimensional, según la reivindicación 1, caracterizado porque dicha lámpara (3) es una lámpara de tipo "blacklight" con una luz de LEDs de tipo continuo de color rojo, siendo su tamaño superior al del objeto a examinar (5).
8. Equipo de control dimensional, según la reivindicación 1, caracterizado porque la alimentación del objeto a examinar (5) sobre el soporte (4) y su retirada del mismo se efectúa manualmente y/o automáticamente con brazo de robot o dispositivo análogo.
Patentes similares o relacionadas:
Transferencia con control de contorno, del 29 de Julio de 2020, de JUNGHEINRICH AKTIENGESELLSCHAFT: Disposición para el control de contorno de palés que deben almacenarse en un sistema de estanterías, que comprende: una estación de transferencia […]
Dispositivo y procedimiento para medir la forma de una porción de pared de un horno de coque, del 15 de Julio de 2020, de Centre de Pyrolyse du Charbon de Marienau: Un dispositivo para medir una forma de una porción de pared de un horno de coque , comprendiendo el dispositivo : - una caja […]
Dispositivo y método para medir la rectitud de una pieza de trabajo en forma de varilla, del 15 de Julio de 2020, de MSG Maschinenbau GmbH: Dispositivo para medir la rectitud de una pieza de trabajo en forma de varilla con un soporte para la pieza de trabajo en forma de varilla y un aparato para detectar […]
DISPOSITIVO DE MEDICIÓN DE COTAS GEOMÉTRICAS, del 2 de Julio de 2020, de EMPRESA DE TRASPORTE MASIVO DEL VALLE DE ABURRA LTDA. - METRO DE MEDELLIN LTDA: La presente invención se refiere a dispositivos y métodos de medición de cotas geométricas en cables de un teleférico para verificar que el desplazamiento del cable […]
Dispositivo de control tridimensional sin contacto de una pieza hueca con superficie interna de revolución y procedimiento correspondiente, del 1 de Abril de 2020, de DWFritz Automation, Inc: Dispositivo de control tridimensional sin contacto de una pieza hueca con superficie interna de revolución, denominada pieza hueca que va a controlarse, comprendiendo […]
Método y sistema para inspeccionar una pieza de trabajo, del 18 de Marzo de 2020, de THE BOEING COMPANY: Un método para inspeccionar una pieza de trabajo , comprendiendo dicho método: la introducción de datos del modelo asociado con la pieza de trabajo […]
Equipo y procedimiento para la fabricación de piezas de prótesis dental, del 18 de Marzo de 2020, de INSTITUT STRAUMANN AG: Equipos de captación de superficies y equipos de generación de superficies, con equipos para la detección parcial o totalmente automática de bordes de preparaciones […]
Sistema con integración de interfaz de usuario 3D, del 5 de Febrero de 2020, de 3SHAPE A/S: Un sistema que comprende: -por lo menos un visualizador , donde el por lo menos un visualizador está adaptado para representar visualmente una […]