PROCEDIMIENTO PARA DESCRIBIR EL COMPORTAMIENTO GEOMETRICO DE HUMANOS EN UNA ESCENA CAPTADA POR UN SISTEMA DE VISION ARTIFICIAL, BASADO EN UN MODELO DE BLOQUES Y, ESPECIAL, ORIENTADO A LA TAREA DE VIDEO-VIGILANCIA.
Procedimiento que es capaz de monitorizar, en tiempo real y con una carga computacional mínima,
el "comportamiento geométrico" de un humano en una escena captada por un sistema de visión artificial. Donde, por ·comportamiento geométrico" de un humano, nos referimos a la descripción de eventos en un espacio 3D relacionados con características estáticas (posición) y dinámicas (movimiento) del comportamiento de un humano o de partes de éste.
El procedimiento se basa en caracterizar el humano mediante un modelo de bloques. Este modelo, relativamente simple, permite tratar de forma similar distintas vistas del humano y proporciona la información necesaria para una descripción robusta y fiable de distintos eventos de interés para la tarea de vigilancia mediante visión artificial
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200603272.
Solicitante: UNIVERSIDAD NACIONAL DE EDUCACION A DISTANCIA (UNED).
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: RINCON ZAMORANO,MARIANO, FOLGADO ZUIGA,ENCARNA, CARMONA SUAREZ,ENRIQUE, BACHILLER MAYORAL,MARGARITA.
Fecha de Solicitud: 27 de Diciembre de 2006.
Fecha de Publicación: .
Fecha de Concesión: 15 de Febrero de 2010.
Clasificación Internacional de Patentes:
- H04N7/18 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04N TRANSMISION DE IMAGENES, p. ej. TELEVISION. › H04N 7/00 Sistemas de televisión (detalles H04N 3/00, H04N 5/00; métodos y arreglos, para la codificación, decodificación, compresión o descompresión de señales de vídeo digital H04N 19/00; distribución selectiva de contenido H04N 21/00). › Sistemas de televisión en circuito cerrado, es decir, sistemas en los cuales la señal no es difundida.
Clasificación PCT:
- H04N7/18 H04N 7/00 […] › Sistemas de televisión en circuito cerrado, es decir, sistemas en los cuales la señal no es difundida.
Fragmento de la descripción:
Procedimiento para describir el comportamiento geométrico de humanos en una escena captada por un sistema de visión artificial, basado en un modelo de bloques y, en especial, orientado a la tarea de vídeo-vigilancia.
Estado de la técnica
El objetivo final de un sistema de visión artificial es la descripción de la escena captada orientada a una tarea (en nuestro caso vigilancia). Centrándonos en la descripción de la actividad humana, y de acuerdo a las referencias [1, 2, 3], el reconocimiento de actividades es considerado como un problema de clasificación de características espacio-temporales o, alternativamente, como "queries" sobre construcciones de más alto nivel obtenidas a partir de dichas características espacio-temporales mediante procesos de abstracción.
Actualmente, existen gran cantidad de modelos de humanos que permiten conseguir este tipo de información espacio-temporal a partir de la región asociada a un humano obtenida en un proceso de segmentación previo. Sin embargo, estos modelos presentan inconvenientes: o son demasiado simples, y sólo determinan algunas características del humano como, por ejemplo, la postura, o son demasiado sofisticados, con lo que resultan difíciles de implementar y presentan un elevado coste computacional. Esto los hace, en ambos casos, poco recomendables en tareas de vigilancia que requieran tiempo real y bajo coste computacional.
Descripción resumida de la invención
La presente invención se refiere a un procedimiento que es capaz de monitorizar, en tiempo real y con una carga computacional mínima, el "comportamiento geométrico" de un humano en una escena a partir de imágenes de vídeo segmentadas previamente. Por "comportamiento geométrico", nos referimos a la descripción de eventos, en un espacio 3D, relacionados con características estáticas (posición) y dinámicas (movimiento) de un humano o de partes de éste (cabeza, manos, pies, etc) desde el punto de vista de unas cámaras que captan su imagen. Como ejemplos de estos eventos, podemos citar: "está parado", "está de pie", "avanza hacia la izquierda", "lleva un objeto en la mano derecha", "comienza a andar", "se desplaza rápido", etc).
El procedimiento se basa en caracterizar el humano mediante un modelo de bloques. Este modelo, relativamente simple, permite tratar de forma similar distintas vistas del humano y proporciona la información necesaria para una descripción robusta y fiable de distintos eventos de interés para la tarea de vigilancia mediante visión artificial.
Estas características pueden utilizarse, a modo de librería, para la descripción de actividades más complejas en multitud de tareas, en especial en vigilancia (vigilancia de equipajes en aeropuertos, vigilancia de comportamientos de clientes en bancos, vigilancia de pacientes en hospitales, etc).
Descripción de la invención
El objetivo del procedimiento de la presente invención es solventar los inconvenientes que presentan los procedimientos actuales para caracterizar el comportamiento geométrico de un humano en una escena captada mediante un sistema de visión artificial, proporcionando las ventajas que se describen a continuación.
Partiendo de que 1) la cámara se ha calibrado, de forma que es posible establecer la correspondencia entre los puntos de la imagen y las coordenadas 3D de la escena y 2) se dispone de un método para segmentar la imagen de vídeo e identificar la silueta correspondiente a un humano, el procedimiento objeto de la presente invención consta de las siguientes etapas:
La principal novedad de este procedimiento es el modelo de humano utilizado para describir la actividad del humano. Este modelo se basa en dividir horizontalmente la región correspondiente a un humano en N subregiones y utilizar el rectángulo que circunscribe a cada una de ellas para su caracterización. Al modelo se le denomina modelo de bloques (MB).
Este modelo (MB) tiene la gran ventaja de que permite descomponer el análisis del humano y su actividad en partes, lo que reduce la carga computacional necesaria. Otra ventaja de este modelo (MB) es que trata del mismo modo la vista del humano tomada desde distintas perspectivas, desde las vistas frontal y lateral puras, hasta combinaciones parciales de éstas, lo que permite tratar de forma simple, con bajo coste computacional, cualquier situación típica en tareas de vigilancia.
Además, como la detección de los eventos de interés consiste en el simple reconocimiento de cada uno de sus patrones asociados, se obtiene un sistema modular y fácilmente extensible. Actualmente, los eventos detectados por este procedimiento, sin perjuicio de que puedan detectar más en un futuro, son los siguientes:
Breve descripción de los dibujos
Con el fin de facilitar la descripción de cuanto se ha expuesto anteriormente, se adjuntan unos dibujos en los que, esquemáticamente y sólo a título de ejemplo no limitativo, se representa un caso práctico del procedimiento para describir el comportamiento geométrico de un humano en una escena, en especial orientado a la tarea de vídeo-vigilancia.
La figura 1 muestra el esquema general del procedimiento de la presente invención.
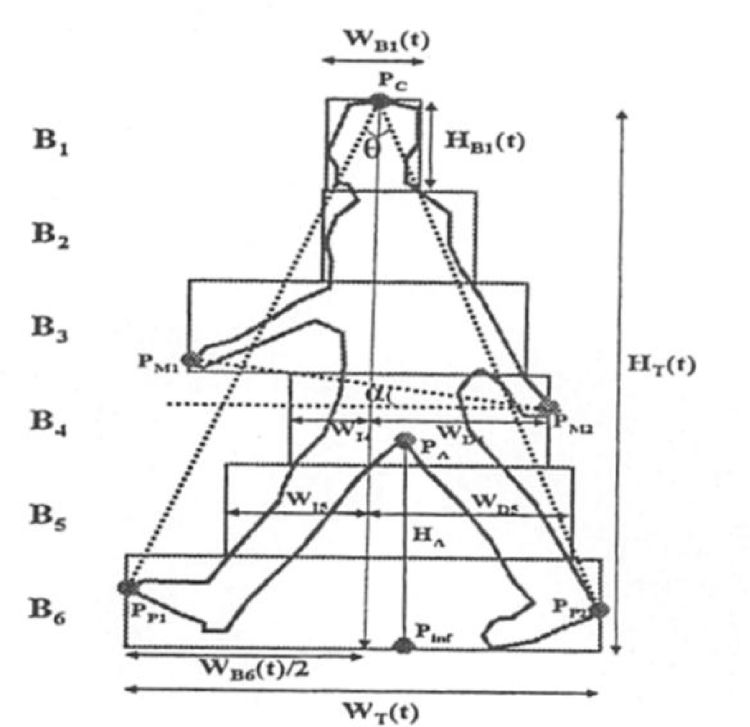
La figura 2 muestra la división, según el modelo de bloques (MB), de la región correspondiente a un humano, los puntos significativos y los distintos parámetros que forman parte del modelo de humano de la presente invención.
Descripción de la realización preferida
Tal como se observa en la figura 1, los pasos para obtener una descripción del comportamiento geométrico de un humano son los siguientes:
Reivindicaciones:
1. Procedimiento para describir el comportamiento geométrico de un humano en una escena captada por un sistema de visión artificial, basado en un modelo de bloques y, en especial, orientado a la tarea de vídeo-vigilancia, caracterizado por el hecho de que comprende los siguientes pasos:
2. Procedimiento según la reivindicación 1, caracterizado por el hecho de que el modelo de humano utilizado (MB) está basado en dividir horizontalmente la región de la imagen correspondiente a un humano en un número N de subregiones y utilizar el rectángulo que circunscribe a cada una de ellas para su caracterización.
3. Procedimiento según las reivindicaciones anteriores, caracterizado por el hecho de que el modelo de humano comprende los siguientes parámetros y puntos significativos
4. Procedimiento según las reivindicaciones anteriores, caracterizado por el hecho de que se utilizan como parámetro del modelo de referencia la altura del humano de pie (HTref).
5. Procedimiento según las reivindicaciones anteriores, caracterizado por el hecho de que el modelo de humano comprende el parámetro dependiente "ángulo ?", que se define como el ángulo que forma el punto asociado a la cabeza (PC), con los puntos asociados a los pies (PP1 y PP2).
6. Procedimiento según las reivindicaciones anteriores, caracterizado por el hecho de que el modelo de humano comprende el parámetro dependiente "ángulo a", que es el ángulo que forma la línea que une los puntos asociados a las dos manos (PM1 y PM2) con la horizontal.
7. Procedimiento según las reivindicaciones anteriores, caracterizado por el hecho de que el modelo de humano comprende el parámetro dependiente La relación_altura_entrepierna (HC), que se obtiene como la relación entre la altura del punto de unión de las dos piernas (H?) y la altura total (HT(t)). (H?) se calcula como la distancia desde (P?) al punto más inferior del bloque B6 situado en la vertical (Pinf):
8. Procedimiento según las reivindicaciones anteriores, caracterizado por el hecho de que el modelo de humano comprende el parámetro dependiente cambio_de_anchura (CA), que se define como el vector de seis coordenadas que contiene, para cada bloque Bi, la relación entre la anchura del bloque entre un "frame" y el anterior:
9. Procedimiento según las reivindicaciones anteriores, caracterizado por el hecho de que el modelo de humano comprende el parámetro dependiente "Coeficiente de simetría" (CSB4_B5), que representa, mediante un vector de dos coordenadas, la proporción entre las anchuras de las partes de los bloques B4 y B5 a derecha e izquierda de la recta divisoria que une el punto central de la cabeza con el punto medio inferior del bloque B6:
10. Procedimiento según las reivindicaciones anteriores, caracterizado por el hecho de que se utilizan los parámetros definidos en las reivindicaciones anteriores para definir expresiones que describen los distintos eventos de interés mediante expresiones, las cuales se basan, principalmente, en proporciones entre los parámetros o variaciones de éstos en el tiempo.
11. Procedimiento según las reivindicaciones anteriores, caracterizado por el hecho de que se utilizan las expresiones descritas en la reivindicación 8 para detectar, mediante comparación de patrones, los eventos de interés para la tarea de vídeo-vigilancia.
12. Procedimiento según las reivindicaciones anteriores, caracterizado por el hecho de que reconoce eventos relacionados con lo siguiente:
Patentes similares o relacionadas:
Dispositivo de control remoto para grúa, máquina de construcción y/o camión industrial, y sistema que comprende este dispositivo de control remoto y una grúa, una máquina de construcción y/o un camión industrial, del 13 de Mayo de 2020, de LIEBHERR-WERK BIBERACH GMBH: Dispositivo de control remoto para una grúa, una máquina de construcción o un camión industrial, con un terminal móvil en forma de tableta que comprende una […]
Método, dispositivo y medios de almacenamiento informático de control táctil de múltiples canales para máquina de integración, del 13 de Mayo de 2020, de Guangzhou Shirui Electronics Co., Ltd: Un método para un control táctil de múltiples canales de una máquina todo en uno, en donde la máquina todo en uno es un equipo integrador que combina […]
Procedimiento de visualización de imágenes o vídeos e instalación asociada, del 29 de Abril de 2020, de THALES: Procedimiento de visualización sobre un visualizador de imágenes o vídeos procedentes de cámaras , constando el visualizador de varias zonas de visualización […]
Captación de corredor, del 29 de Abril de 2020, de nearmap australia pty, ltd: Un método para crear un ortomosaico de un área de corredor que consiste en una faja de tierra o de agua a lo largo de una trayectoria arbitraria , área […]
Aparato y procedimiento para adquirir una imagen bidimensional de la superficie de un objeto tridimensional, del 1 de Abril de 2020, de Capsugel Belgium NV: Aparato para adquirir una imagen bidimensional de la superficie externa de un objeto tridimensional seleccionado de cápsulas del tipo utilizada en aplicaciones […]
Sistema y procedimiento de actualizaciones de parámetros de cámara basados en zonas virtuales en sistemas de vídeo vigilancia, del 18 de Marzo de 2020, de HONEYWELL INTERNATIONAL INC.: Un método que comprende: un procesador de un sistema de vigilancia que detecta la selección de al menos una porción de un área asegurada a través de […]
Sombreado de representaciones CG de materiales, del 18 de Marzo de 2020, de Chaos Software Ltd: Un aparato para escanear muestras de material, el aparato comprendiendo: una fuente de luz colimada que tiene una lente para emitir luz colimada; un segundo […]
Sistema y método para la reconfiguración de un dispositivo de control de un sistema de entretenimiento, del 4 de Marzo de 2020, de UNIVERSAL ELECTRONICS, INC.: Un dispositivo de entretenimiento , que comprende: un dispositivo de procesamiento ; y un medio no transitorio, legible por computadora […]