ARTICULACION DE PRECISION, DE BOLA.
Articulación (3) que une dos órganos (1, 2) en prolongación y que comprende una bola (4) situada entre dos asientos cóncavos (5,
6) dispuestos en los órganos, caracterizada porque comprende dos horquillas (7, 8) convergentes situadas en los órganos, un anillo (12) articulado a las dos horquillas y que rodea a la bola, y un medio (13) de retorno situado entre una de las horquillas y uno de los órganos y que empuja a este órgano hacia la bola
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2006/050543.
Solicitante: COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES.
Nacionalidad solicitante: Francia.
Dirección: BATIMENT "LE PONANT D" 25, RUE LEBLANC,75015 PARIS.
Inventor/es: BRISSET, DIDIER, PAQUIGNON,GAEL, DAVID,JEAN-MARIE, DIOLEZ,GILLES, PERIN,JEAN-PAUL, CHATAIN,DENIS.
Fecha de Publicación: .
Fecha Concesión Europea: 9 de Junio de 2010.
Clasificación Internacional de Patentes:
- F16C11/06 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16C ARBOLES; ARBOLES FLEXIBLES; MEDIOS MECANICOS PARA TRANSMITIR MOVIMIENTO EN UNA FUNDA FLEXIBLE; ELEMENTOS DE LOS MECANISMOS DEL CIGÜEÑAL; PIVOTES; UNIONES PIVOTANTES; PIEZAS ROTATIVAS DE INGENIERIA DISTINTAS A LAS PIEZAS DE TRANSMISION MECANICA, ACOPLAMIENTOS, EMBRAGUES O FRENOS; COJINETES. › F16C 11/00 Pivotes; Uniones pivotantes (disposición relativa de las articulaciones de la timonería de dirección B62D 7/16). › Articulaciones de rótula; Otras articulaciones que tienen más de un grado de libertad angular, es decir, juntas universales (juntas universales en las cuales la flexibilidad se logra con pivotes u órganos de unión deslizantes o rodantes F16D 3/16).
- F16D3/40 F16 […] › F16D ACOPLAMIENTOS PARA LA TRANSMISION DE MOVIMIENTOS DE ROTACION (transmisión para transmitir la rotación F16H, p. ej. transmisiones por fluidos F16H 39/00 - F16H 47/00 ); EMBRAGUES (embragues dinamo-eléctricos H02K 49/00; embragues que utilizan atracción electrostática H02N 13/00 ); FRENOS (sistemas de frenado electrodinámicos para vehículos, en general B60L 7/00; frenos dinamoeléctricos H02K 49/00). › F16D 3/00 Acoplamientos extensibles, es decir, con medios que permiten el movimiento entre partes acopladas durante su accionamiento (acoplamientos desmontables por movimiento axial simplemente F16D 1/10; acoplamientos de deslizamiento F16D 7/00; acoplamientos mediante fluidos F16D 31/00 - F16D 39/00). › con un órgano intermedio provisto de dos pares de muñones dirigidos hacia el exterior sobre los ejes cruzados.
- F16D3/41 F16D 3/00 […] › con rodamientos de bolas o de rodillos.
Clasificación PCT:
- F16C11/06 F16C 11/00 […] › Articulaciones de rótula; Otras articulaciones que tienen más de un grado de libertad angular, es decir, juntas universales (juntas universales en las cuales la flexibilidad se logra con pivotes u órganos de unión deslizantes o rodantes F16D 3/16).
- F16D3/41 F16D 3/00 […] › con rodamientos de bolas o de rodillos.
Descripción:
Articulación de precisión, de bola.
Campo técnico
El objeto de esta invención es una articulación de precisión, de bola, que une dos órganos en prolongación. Ésta puede aplicarse, entre otros, a un brazo de robot articulado. Esta articulación es doble o triple, es decir que permite rotaciones de los dos órganos en todas las direcciones y eventualmente giros alrededor de sus ejes.
Es posible construir las articulaciones múltiples de diversas maneras, por ejemplo con pivotes con ejes de rotación convergentes o lengüetas flexibles. Pero, si se busca una precisión muy grande de la posición del centro de rotación, y un desplazamiento angular importante, de varias decenas de grados, estos mecanismos no son adecuados debido a los juegos de los rodamientos del pivote y a la rigidez que las lengüetas deben mantener.
Se recurre, por lo tanto, a otra familia conocida de articulaciones, que comprenden una bola esférica que gira sobre un asiento cóncavo en el que se ajusta, para constituir la invención. El centro de rotación se determina con gran precisión para este tipo de articulaciones, incluso en un gran desplazamiento angular. Además, la articulación es resistente. Sin embargo, debe ejercerse una fuerza de compresión sobre la bola para mantenerla en contacto con los dos órganos y evitar la separación de la articulación.
Los documentos FR-A-1 049 995 y FR-A-947 212 describen sistemas articulados utilizados ante todo para realizar un bloqueo en una posición angular seleccionada y que comprenden una esfera fijada a una varilla, una horquilla y una abrazadera articuladas conjuntamente a un eje, y un casquete esférico dependiente de la horquilla y que un muelle empuja contra la esfera atrayendo a la abrazadera contra ésta. El bloqueo de la esfera se realiza entre la abrazadera y el casquete esférico. No puede obtenerse un ajuste de posición convergente adecuado entre la varilla fijada a la esfera y otra varilla fijada a la horquilla debido a las incertidumbres de fijación de la esfera a la varilla y de posición del eje de articulación con respecto al centro de la esfera, que depende de las dimensiones reales de la abrazadera de bloqueo.
Un objeto esencial de la invención es superar esta dificultad para ampliar el campo de aplicación de dicha articulación de bola, y particularmente para la unión de segmentos de un brazo de robot sometidos a fuerzas imprevistas de compresión o de tracción.
La invención se refiere a una articulación que une dos órganos en prolongación y que comprende una bola situada entre dos asientos cóncavos dispuestos en los órganos, caracterizada porque comprende dos horquillas convergentes situadas en los órganos, un anillo articulado a las dos horquillas y que rodea a la bola, y un medio de retorno colocado entre una de las horquillas y uno de los asientos y que empuja a este órgano hacia la bola.
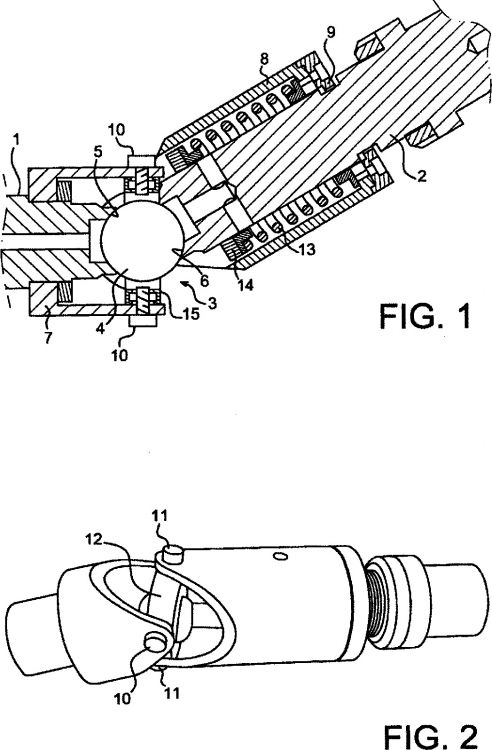
La invención se describirá a continuación en relación con las figuras 1 y 2, que representan la región de la articulación en corte y en vista externa. La realización representada en las figuras 1 y 2 comprende dos segmentos 1 y 2 sucesivos de un brazo de robot en prolongación y cuyo ángulo puede ajustarse mediante un círculo de gatos accionadores (no representado) que los une, y que están unidos por una articulación 3. La articulación 3 se compone de y comprende una bola 4 cuya esfericidad está garantizada con gran precisión (puede tratarse de una bola de rodamiento, que los fabricantes saben construir con gran calidad) apoyada sobre asientos circulares 5 y 6 circulares y cóncavos (en este caso cónicos) en los extremos respectivos de los segmentos 1 y 2. La articulación 3 comprende también dos horquillas 7 y 8 acopladas respectivamente alrededor de los extremos de los segmentos 1 y 2. La horquilla 7 se fija al segmento 1, y la horquilla 8 se dispone en la parte posterior de una abrazadera 9 acoplándose en una ranura del segmento 2. Este ajuste permite la rotación en giro de la horquilla 8 con respecto al segmento 2.
Las horquillas 7 y 8 comprenden, cada una, un par de piezas de eje 10 y 11 en prolongación. Además, el eje de las piezas 10 cruza el de las piezas 11. Un anillo 12 está articulado con las piezas de eje 10 y 11. El conjunto compuesto por las horquillas 7 y 8, por las piezas 10 y 11 y por el anillo 12 forma un cardán que envuelva a la bola 4. La bola 4 permanece libre, es decir que no está sujeta a ninguna pieza y que sería libre de caer si los segmentos 1 y 2 se alejaran uno del otro. El anillo 12 también está separado de la bola 4, con un mayor radio que ésta. Un muelle 13 se extiende en la horquilla 8 coaxialmente al segmento 2. Éste está comprimido entre la región de la abrazadera 9 y una arandela 14 fijada al segmento 2, y crea una pre-tensión en la articulación 3 mediante la cual el segmento 2 es empujado de vuelta hacia la bola 4. Los rodamientos 15 aseguran el giro pivotante de las piezas de ejes 10 y 11.
El funcionamiento y las ventajas de la articulación 3 pueden darse como en este caso. La precisión de posición del centro de rotación de la articulación 3 está garantizada por el apoyo de los asientos 5 y 6 sobre la bola 4. La precisión es muy grande en un gran intervalo angular si la bola 4 está directamente apoyada sobre asientos cónicos 5 y 6, sin interposición, por ejemplo, de elementos intermedios de rodamiento. El anillo articulado 12 a los segmentos 1 y 2 también los une pero sin precisión. La ausencia de cualquier contacto entre el anillo 12 y la bola 4 impide perjudicar a la convergencia de los ejes de los segmentos 1 y 2 en el centro de la bola 4. La pre-carga del muelle 13 empuja al segmento 2 de vuelta hacia el segmento 1 para mantener el contacto de la bola 4 sobre los asientos 5 y 6 siempre que no se ejerza una fuerza de tracción bastante grande sobre los segmentos 1 y 2. El tope de la abrazadera 9 en su ranura cuando se tira del segmento 2 sigue impidiendo la luxación de la articulación 3 al retener la bola 4, que permanece retenida entre los asientos 5 y 6 y el anillo 12, ya que no es posible alejar mucho el segmento 2. Un servicio normal de la articulación 3 se reanuda en el momento en que cesa la fuerza de tracción importante, devolviendo el muelle 13 al segmento 2 a su lugar y al asiento 6 en tope contra la bola 4.
Por lo tanto, se obtiene una excelente fiabilidad de la articulación 3, junto con una gran sencillez de la estructura. El centro de rotación de la articulación 3 permanece en una zona muy pequeña, del orden de un micrómetro de radio. La articulación 3 puede resistir grandes fuerzas. El desgaste de la bola 4 no reduce la calidad de la articulación, ya que el muelle 13 mantiene el contacto acercando los asientos 5 y 6 entre sí. No se necesita ninguna lubricación.
Reivindicaciones:
1. Articulación (3) que une dos órganos (1, 2) en prolongación y que comprende una bola (4) situada entre dos asientos cóncavos (5, 6) dispuestos en los órganos, caracterizada porque comprende dos horquillas (7, 8) convergentes situadas en los órganos, un anillo (12) articulado a las dos horquillas y que rodea a la bola, y un medio (13) de retorno situado entre una de las horquillas y uno de los órganos y que empuja a este órgano hacia la bola.
2. Articulación de acuerdo con la reivindicación 1, caracterizada porque la horquilla (8) provista del medio (13) de retorno está asociada al órgano (2) provisto del medio de retorno mediante un medio de tope (9) que se opone a la luxación de la articulación.
3. Articulación de acuerdo con la reivindicación 1 ó 2, caracterizada porque comprende una unión pivotante (9) entre uno de los órganos y una de las horquillas.
4. Articulación de acuerdo con la reivindicación 1, 2 ó 3, caracterizada porque los asientos cóncavos (5, 6) son cónicos.
5. Articulación de acuerdo con una cualquiera de las reivindicaciones 1 a 4, caracterizada porque el anillo está separado de la bola.
6. Articulación de acuerdo con una cualquiera de las reivindicaciones 1 a 5, caracterizada porque es una articulación de brazo de robot articulado.
Patentes similares o relacionadas:
Articulación de rótula, del 15 de Julio de 2020, de NHK SPRING CO.LTD.: Una articulación de rótula (1b) que comprende: un perno de bola que tiene una porción de perno (10s) con un extremo que está acoplado a un cuerpo […]
Articulación esférica, del 17 de Junio de 2020, de THK Rhythm Automotive GmbH: Articulación esférica con una carcasa externa anular que se compone de al menos un manguito de chapa, con una carcasa interna anular […]
Pieza elástica de unión y alineación de vástago móvil, del 30 de Abril de 2020, de RPK Technological Center S.Coop: Pieza elástica de unión y alineación de vástago móvil a un casquillo de alojamiento , de los empleados en el servofreno la cual es un cuerpo cilíndrico […]
MECANISMO ARTICULADO Y SISTEMA DE APUNTAMIENTO ARTICULADO QUE COMPRENDE ESE MECANISMO, del 23 de Abril de 2020, de Airbus Defence and Space, S.A: El mecanismo articulado comprende una primera rótula esférica , una segunda rótula esférica , una tercera rótula esférica , una primera […]
Junta elastomérica que tiene protuberancias de protección frente a impactos, del 1 de Abril de 2020, de Schaublin SA: Una junta elastomérica resistente a los impactos que comprende; un cuerpo anular que se extiende entre un primer extremo axial (12A) y un segundo extremo axial […]
Unión estabilizadora y procedimiento de fabricación para la misma, del 1 de Abril de 2020, de NHK SPRING CO.LTD.: Unión estabilizadora formada mediante moldeo por inyección utilizando una resina que contiene fibras de refuerzo, que comprende una barra […]
Cojinete roscado avellanado y procedimiento de instalación, del 25 de Marzo de 2020, de THE BOEING COMPANY: Conjunto de cojinete , que comprende: una pista exterior y que tiene un extremo de cabeza y un extremo de base , incluyendo […]
Aerogeneradores con cojinetes elásticos de péndulo de bolas, del 19 de Febrero de 2020, de FM Energie GmbH & Co. KG: Aerogenerador que comprende un absorbedor de vibración de péndulo con alta resistencia axial, que es capaz de absorber grandes fuerzas, recorriendo grandes ángulos en […]