ACCIONADOR GIROSCOPICO, EN PARTICULAR PARA DISPOSITIVO DE PILOTAJE DE LA ACTITUD DE UN SATELITE.
Un accionador giroscópico que comprende un soporte (116) montado sobre una base (110) por medios (114,
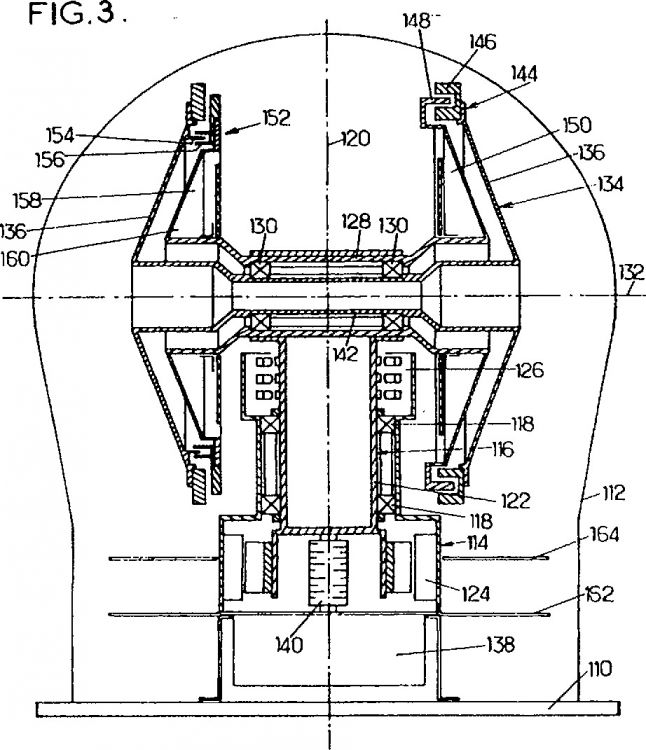
118) que permiten hacerle girar alrededor de un primer eje (120) y que lleva una pieza giratoria (134) por medios (126, 130, 144) que permiten arrastrarle en rotación a velocidad elevada alrededor de un segundo eje (132) ortogonal al primer eje (120), comprendiendo el soporte (116) medios (128, 130) sobre los que gira el árbol (142) de la pieza giratoria, caracterizado porque la pieza giratoria (134) comprende dos costados (136) unidos por el árbol (142), y porque el soporte (116) comprende un tubo (122) en una extremidad del cual está fijado un zócalo (128) atravesado por el árbol (142) y que lleva guías (130) en rotación del árbol (142) y de la pieza giratoria (134) alrededor del segundo eje (132)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E04076876.
Solicitante: EADS ASTRIUM SAS.
Nacionalidad solicitante: Francia.
Dirección: 37, AVENUE LOUIS BREGUET,78140 VELIZY-VILLACOUBLAY.
Inventor/es: LAGADEC, KRISTEN, DEFENDINI, ANGE.
Fecha de Publicación: .
Fecha Solicitud PCT: 21 de Julio de 1999.
Fecha Concesión Europea: 14 de Julio de 2010.
Clasificación Internacional de Patentes:
- B64G1/28B
- B64G1/28D
- G05D1/08D
Clasificación PCT:
- B64G1/28 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64G ASTRONAUTICA; VEHICULOS O EQUIPOS A ESTE EFECTO (aparatos o métodos para obtener materiales de fuentes extraterrestres E21C 51/00). › B64G 1/00 Vehículos espaciales. › que utilizan la inercia o el efecto giroscópico.
- G01C19/06 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 19/00 Giróscopos; Dispositivos sensibles al giro con masas vibratorias; Dispositivos sensibles al giro sin masas móviles; Medida de velocidad angular usando efectos giroscópicos. › Rotores.
- G01C19/08 G01C 19/00 […] › accionados eléctricamente (G01C 19/14 tiene prioridad).
Clasificación antigua:
Países PCT: Bélgica, Alemania, España, Reino Unido, Italia, Suecia.
Fragmento de la descripción:
Accionador giroscópico, en particular para dispositivo de pilotaje de la actitud de un satélite.
El presente invento se refiere a un accionador giroscópico, en particular para dispositivo de pilotaje de actitud de satélite por mando de orientación del eje de rotación de la pieza o cruceta giratoria de accionadores giroscópicos o girodinos de un conjunto de girodinos montado en el satélite.
Los girodinos o accionadores giroscópicos (designados a menudo por la sigla anglosajona cmg) se diferencian de las ruedas de reacción, corrientemente utilizadas para mandar la actitud de un satélite por intercambio de momento cinético, porque están montados sobre un soporte, llamado cardán, orientable por al menos un motor alrededor de al menos un eje ortogonal al eje de rotación de la pieza giratoria. En la mayor parte de los casos las piezas giratorias son arrastradas a velocidad constante o al menos poco variable durante su empleo.
Un conjunto de girodinos debe incluir al menos tres girodinos para permitir reorientar un triedro de referencia unido al satélite en todas las actitudes y al menos dos girodinos para un pilotaje de 2 ejes. En la práctica se utilizan al menos cuatro girodinos en conjunto o racimo para asegurar una redundancia.
El conjunto de girodinos constituye un accionador inercial cuyo mando permite aplicar un par que da a la plataforma del satélite un perfil de velocidades angulares especificado, generalmente por telecarga a partir del suelo. El par es generado por puesta en velocidad del eje cardán de manera que haga precesionar a la pieza giratoria. Para la pieza giratoria de orden i, el par Ci debido al efecto giroscópico está dado por:
Donde
Hi es el momento de inercia de la pieza giratoria de orden:
si es la velocidad angular
Un satélite incluye generalmente un sistema de mando de actitud que recibe señales de entrada de captadores que permiten determinar su posición angular en una referencia inercial. Este sistema, que tiene generalmente una constante de tiempo relativamente larga, permite mantener al satélite en una actitud de consigna mandando los motores de las ruedas de reacción, o los de las cardán cuando el satélite está provisto de girodinos.
En el caso considerado aquí, del control de actitud con ayuda de un conjunto de girodinos, el sistema de mando determina en primer lugar el par a aplicar y debe deducir de él una velocidad a aplicar a las cardán de los girodinos. Las posiciones angulares de las cardán varían en el curso del tiempo. La capacidad de suministro del par total C es en consecuencia no estacionario y no lineal. Puede escribirse, en forma matricial:
donde A es la matriz jacobiana aij = dHi/dsj, con i = 1 a 3 y j = 1 a 4 (o más generalmente uno al número de girodinos).
Un método clásico de guiado consiste, conociendo el par C a proporcionar, en invertir la relación (1) para obtener las velocidades sc de consigna a dar a los girodinos.
Ciertas misiones prevén modificaciones importantes de actitud del satélite en retardos cortos. Los girodinos están particularmente adaptados a estas misiones "ágiles". A la hora actual, se utilizan esencialmente dos métodos para determinar el perfil de velocidades a imponer a los soportes de los girodinos.
Según un primer procedimiento, que se puede calificar de guiado local, se calcula con cada solicitud de par, la velocidad angular requerida para cada soporte por la fórmula (2) lo que vuelve a una pseudo-inversión de la Jacobiana. La tensión impuesta para tener en cuenta la redundancia es la búsqueda de un movimiento con energía mínima.
La experiencia ha mostrado que esta aproximación conduce a menudo a abandonar un girodino cuya reorientación hacia la dirección requerida solicita demasiada velocidad a todos los soportes, con el resultado de que finalmente el conjunto incluye una pieza giratoria "durmiente", mientras que todas las demás se reagrupan en una dirección opuesta. El conjunto está entonces en una configuración singular: el momento cinético es máximo en esta dirección opuesta y es imposible obtener un par según esta dirección.
Existen algoritmos para evitar localmente singularidades por puestas en velocidad de las cardan, tales que el par total resultante sea nulo. Pero estos algoritmos son poco eficaces, pues la aproximación de la singularidad es detectada tardíamente falta de predicciones sobre el perfil de par a seguir. Se está en consecuencia llevado a sobredimensionar la capacidad del conjunto, a fin de franquearse de la mayor parte de las singularidades.
Otra aproximación, que se puede calificar de guiado global continuo, implica calcular, antes del comienzo de la maniobra de cambio de actitud del satélite, la mejor trayectoria de reconfiguración de conjunto s(t) durante toda la maniobra, a fin de evitar pasar en proximidad de una configuración singular. Este cálculo es muy pesado. Debe ser hecho en el suelo, y luego telecargado.
El documento EP 1 002 716 proporciona un procedimiento que permite, en el pilotaje de actitud por girodinos, franquearse del problema de las singularidades, limitando al mismo tiempo la carga de cálculo asociada. El procedimiento según EP 1 002 716 permite entonces explotar la integridad de la capacidad del conjunto para los basculamientos de la actitud del satélite.
Para ello, el documento EP 1 002 716 utiliza en particular el hecho de que la capacidad de par de un girodino no está limitada más que por la velocidad de rotación máxima del motor de arrastre de la cardan. El documento EP 1 002 716 utiliza igualmente la constatación de que es posible pasar transitoriamente en una configuración singular, a condición de que sea en el curso de la reconfiguración del conjunto de girodinos hacia una consigna predeterminada y mientras las cardán están animadas de una velocidad angular importante.
En consecuencia el documento EP 1 002 716 propone un procedimiento de pilotaje de la actitud de un satélite, por mando de uno de los girodinos de un conjunto (generalmente por al menos cuatro girodinos), que tienen piezas giratorias respectivas montadas sobre cardán montadas giratorias sobre una plataforma del satélite, alrededor de ejes de orientaciones diferentes, según la reivindicación 1ª del documento EP 1 002 716.
El documento EP 1 002 716 permite también reducir la duración de los basculamientos por la reducción de las fases de aceleración y de deceleración angulares de comienzo y de final de maniobra. Prácticamente, la ascensión de velocidad será casi instantánea con respecto al tiempo de respuesta de la subordinación de sistema de control de actitud. El momento cinético interno es reorientado en la dirección adecuada para obtener el perfil de velocidad y de actitud del satélite buscado antes de que este sistema intervenga.
El procedimiento del documento EP 1002716 permite además tener en cuenta una tensión de dominio angular de orientación de cada soporte limitando el dominio a una región determinada, por ejemplo de 360º, se pueden así evitar uniones de anillos y escobillas y utilizar cables para el pelado de las potencias y de las señales.
EL documento EP 1002716 propone igualmente un dispositivo de pilotaje de actitud según la reivindicación 10ª del documento EF 1002716.
En tal dispositivo, es posible de limitar el dominio de desplazamiento angular del eje cardán de un girodino 1-eje (por ejemplo a
El documento de patente JP 01 226 496 divulga un accionador giroscópico, según el preámbulo de la reivindicación 1ª, que comprende, en referencia a los dibujos de este documento, un soporte (12, 13) montado sobre una base (14) por medios (15) que permiten hacer girar alrededor de un primer eje (12a), y que llevan un trompo (110) por los medios (11) permitiendo arrastrar en rotación a velocidad elevada alrededor de un segundo eje (10a) ortogonal al primer eje. En la extremidad del soporte (12, 13) por el lado opuesto a la base, el soporte comprende medios sobre los que gira el árbol del trompo alrededor del segundo eje.
El documento de patente US 5 256 942 muestra un accionador giroscópico, según el preámbulo de la reivindicación 1ª, con, en referencia a los dibujos de este documento,...
Reivindicaciones:
1. Un accionador giroscópico que comprende un soporte (116) montado sobre una base (110) por medios (114, 118) que permiten hacerle girar alrededor de un primer eje (120) y que lleva una pieza giratoria (134) por medios (126, 130, 144) que permiten arrastrarle en rotación a velocidad elevada alrededor de un segundo eje (132) ortogonal al primer eje (120), comprendiendo el soporte (116) medios (128, 130) sobre los que gira el árbol (142) de la pieza giratoria, caracterizado porque la pieza giratoria (134) comprende dos costados (136) unidos por el árbol (142), y porque el soporte (116) comprende un tubo (122) en una extremidad del cual está fijado un zócalo (128) atravesado por el árbol (142) y que lleva guías (130) en rotación del árbol (142) y de la pieza giratoria (134) alrededor del segundo eje (132).
2. Un accionador según la reivindicación 1ª, caracterizado porque el zócalo (128) está fijado en una extremidad del tubo (122) por el lado opuesto a la base (110).
3. Un accionador según una cualquiera de las reivindicaciones 1ª y 2ª, caracterizado porque los medios de arrastre de la pieza giratoria (134) en rotación comprenden un motor de par (144) sin escobilla y sin hierro que tiene un rotor anular pasivo (146) que pertenece a la periferia de uno de los costados (136) y un arrollamiento (148) alimentado por medio de conectadores giratorios (126) colocados entre el soporte (116) y la base (110).
4. Un accionador según la reivindicación 3ª, caracterizado porque el arrollamiento (148) está fijado a la periferia de una llanta (158) solidaria del soporte (116).
5. Un accionador según una cualquiera de las reivindicaciones 1ª a 4ª, caracterizado porque comprende un taquímetro (152) que tiene una corona pasiva (154) fijada a un costado (136) y una parte activa (156) que pertenece a una llanta (158) solidaria del soporte (116).
6. Un accionador según la reivindicación 5ª, caracterizado porque el taquímetro (152) es sin contactos.
7. Un accionador según la reivindicación 6ª, caracterizado porque el taquímetro (152) incluye al menos un acoplador optoelectrónico que tiene un diodo electroluminiscente y una fotorresistencia llevada por la llanta (158), que coopera con la corona anular (154) que presenta una alternancia de zonas de transmisión y de ocultación de un haz luminoso entre el diodo electroluminiscente y el fototransistor.
8. Un accionador según una cualquiera de las reivindicaciones 1ª a 7ª, caracterizado porque los medios (114, 118) que permiten hacer girar el soporte (116) comprenden un motor de par (124) de corriente continua y de conmutación electrónica que tiene imanes permanentes sobre el soporte (116) y un arrollamiento sobre una parte de estator (114) solidaria de la base (110).
9. Un accionador según una cualquiera de las reivindicaciones 1ª a 8ª, caracterizado porque comprende un codificador (138) de posición angular del soporte (116) que tiene una parte solidaría de la base (110) y un rotor unido al soporte (116) por un acoplamiento elástico (140).
10. Un accionador según una cualquiera de las reivindicaciones 1ª a 9ª, caracterizado porque el árbol (142) es de diámetro muy inferior al diámetro de los costados (136).
Patentes similares o relacionadas:
DISPOSITIVO MODULAR PARA EL AISLAMIENTO MULTI-AXIAL DE VIBRACIONES Y CHOQUES, A BASE DE UN ELASTÓMERO, del 13 de Diciembre de 2011, de ASTRIUM SAS: Dispositivo de aislamiento multiaxial de, como mínimo, un equipo generador de vibraciones situado a bordo de una estructura portante , tal como un satélite, […]
GIRODINO Y SU DISPOSITIVO DE MONTAJE, del 11 de Enero de 2011, de ASTRIUM SAS: Girodino que comprende una rueda de inercia montada, por medio de un soporte de rueda , sobre la parte móvil o rotor de un conjunto de cardán que comprende […]
 SISTEMA DINAMICO PARA EL GOBIERNO DE MOVILES, del 16 de Mayo de 2008, de ADVANCED DYNAMICS, S.A: Sistema dinámico para el gobierno de móviles.#Se describe un sistema dinámico mediante el que resulta posible llevar a cabo el control de un móvil de cualquier tipo […]
SISTEMA DINAMICO PARA EL GOBIERNO DE MOVILES, del 16 de Mayo de 2008, de ADVANCED DYNAMICS, S.A: Sistema dinámico para el gobierno de móviles.#Se describe un sistema dinámico mediante el que resulta posible llevar a cabo el control de un móvil de cualquier tipo […]
 DISPOSITIVO ELECTROMAGNETICO DE GENERACION DE UNA FUERZA Y DE UN PAR CON EL FIN DEL POSICIONAMIENTO DE UN CUERPO, del 28 de Mayo de 2010, de THALES: Dispositivo de actuación, que comprende primeros medios electromagnéticos (ME-H), instalados en al menos un primer cuerpo (H) y que definen un primer […]
DISPOSITIVO ELECTROMAGNETICO DE GENERACION DE UNA FUERZA Y DE UN PAR CON EL FIN DEL POSICIONAMIENTO DE UN CUERPO, del 28 de Mayo de 2010, de THALES: Dispositivo de actuación, que comprende primeros medios electromagnéticos (ME-H), instalados en al menos un primer cuerpo (H) y que definen un primer […]
 DISPOSITIVO DE CONTROL DE ACTITUD DE UN SATELITE GEOESTACIONARIO, del 11 de Mayo de 2010, de ALCATEL: Dispositivo de control de actitud de un satélite de tipo geoestacionario que comprende elementos alargados incluyendo generadores solares […]
DISPOSITIVO DE CONTROL DE ACTITUD DE UN SATELITE GEOESTACIONARIO, del 11 de Mayo de 2010, de ALCATEL: Dispositivo de control de actitud de un satélite de tipo geoestacionario que comprende elementos alargados incluyendo generadores solares […]
 METODO PARA MANIOBRAR UN SATELITE GEOESTACIONARIO Y SISTEMA DE CONTROL DE SATELITE PARA IMPLEMENTAR DICHO METODO, del 14 de Enero de 2010, de EUTELSAT: Un método para maniobrar un satélite geoestacionario con subsistemas de propulsión empleando la reacción química de un monopropelente o de un […]
METODO PARA MANIOBRAR UN SATELITE GEOESTACIONARIO Y SISTEMA DE CONTROL DE SATELITE PARA IMPLEMENTAR DICHO METODO, del 14 de Enero de 2010, de EUTELSAT: Un método para maniobrar un satélite geoestacionario con subsistemas de propulsión empleando la reacción química de un monopropelente o de un […]
 Dispositivo de centrador de rodamiento magnético con dos conjuntos de bobinado y de imanes en el estátor y sin imán en el rotor, del 28 de Agosto de 2019, de THALES: Dispositivo de centrador magnético que incluye:
• un cuerpo móvil, llamado rotor (R'), que incluye una corona de acero que comprende una estructura mecánica y […]
Dispositivo de centrador de rodamiento magnético con dos conjuntos de bobinado y de imanes en el estátor y sin imán en el rotor, del 28 de Agosto de 2019, de THALES: Dispositivo de centrador magnético que incluye:
• un cuerpo móvil, llamado rotor (R'), que incluye una corona de acero que comprende una estructura mecánica y […]
Dispositivo y procedimiento de determinación de actitud de un satélite, y satélite que incorpora dicho dispositivo, del 25 de Abril de 2019, de Airbus Defence and Space SAS: Dispositivo de determinación de una actitud o de una variación de actitud de un satélite , estando provisto el citado satélite de un sistema […]