CONTROL DE MOVIMIENTO UNIVERSAL.
Control de movimiento universal con sistema técnico y sistema de tiempo de ejecución,
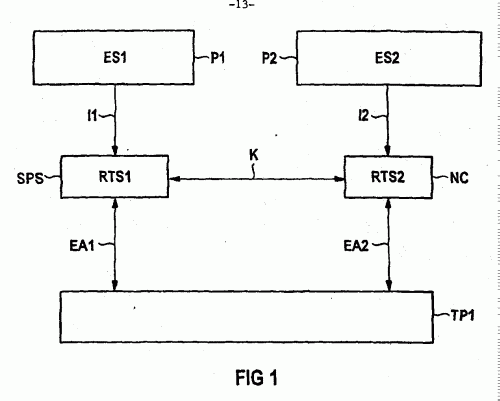
que combina en sí funcionalmente los cometidos clásicos de un control programable con memoria y de un control numérico, caracterizado porque un modelo unitario de planos de ejecución (AE) está configurado de tal forma que presenta varios planos de ejecución de diferente tipo con diferente prioridad, estando previstos planos de usuario y planos del sistema de diferente prioridad desde prioridad máxima a prioridad mínima y porque se pueden cargar, respectivamente, paquetes de tecnología (TP) por parte del usuario en el sistema técnico y/o sistema de tiempo de ejecución (ES1-ES4, RTS1-RTS4), porque una fuente de datos (D) para informaciones de descripción para variables del sistema así como, dado el caso, alarmas y/o instrucciones de voz pone a la disposición del sistema técnico (ES1-ES4) instrucciones de voz y/o variables del sistema a través de un convertidor (U), porque se pueden alimentar desde el sistema de tiempo de ejecución (RTS1-RTS4) las variables del sistema con datos actuales del proceso técnico (TP1, TP2), y porque a través de una superficie de mando del sistema técnico (ES1-ES4) se pueden realizar otras entrada por parte del usuario.
Tipo: Resumen de patente/invención.
Solicitante: SIEMENS AKTIENGESELLSCHAFT.
Nacionalidad solicitante: Alemania.
Dirección: WITTELSBACHERPLATZ 2,80333 MUNCHEN.
Inventor/es: KIESEL, MARTIN, DIPL.-ING., MORGENROTH, MARIA, STEINLEIN, GEORG, DIPL.-ING. FH.
Fecha de Publicación: .
Fecha Concesión Europea: 6 de Agosto de 2003.
Clasificación Internacional de Patentes:
- G05B19/414 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Estructura del sistema de control, p. ej. controlador común o sistema multiprocesador, interfaz hacia el servocontrolador, controlador de interfaz programable.
Patentes similares o relacionadas:
Dispositivo y método para la transmisión de datos, del 10 de Junio de 2020, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo para la transmisión de datos con una interfaz de aparato de medición , una interfaz de control y una interfaz adicional […]
Dispositivo y método para generar una señal de disparo en un equipo de medición de posición y equipo de medición de posición para ello, del 6 de Mayo de 2020, de DR. JOHANNES HEIDENHAIN GMBH: Método para generar una señal de disparo (T) asíncrona en un equipo de medición de posición , que presenta una unidad de detección de posición […]
Sistemas y métodos para mejorar el bienestar asociado con ambientes habitables, del 4 de Marzo de 2020, de Delos Living, LLC: Un método para controlar características ambientales en un espacio cerrado; el método comprende: - recibir en un primer momento un primer aporte indicativo […]
Método de asignación de períodos de control independientes de ejes en el sistema de posicionamiento PLC, del 21 de Agosto de 2019, de LSIS Co., Ltd: Un método de asignación de períodos de control para ejes en un sistema de posicionamiento PLC , en donde el método comprende dividir […]
Aparato de control numérico modular, del 13 de Mayo de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Aparato de control numérico modular, que está constituido por al menos dos módulos , que contienen, respectivamente, una unidad de microprocesador […]
Control numérico, del 23 de Agosto de 2017, de DR. JOHANNES HEIDENHAIN GMBH: Control numérico para el funcionamiento de una máquina herramienta con varios ejes, con un regulador del accionamiento para cada eje a controlar, en el que los reguladores […]
Sistema de control para controlar la operación de una máquina herramienta de control numérico, y dispositivos de control de extremo trasero y de extremo delantero para uso en tal sistema, del 21 de Junio de 2017, de DMG MORI CO., LTD: Un dispositivo de control de extremo trasero para uso en un sistema de control para controlar la operación de una máquina herramienta de control numérico […]
Método para la transferencia de datos entre un dispositivo de medición de posición y una unidad de procesamiento asignada y dispositivo de medición para llevarlo a cabo, del 12 de Abril de 2017, de DR. JOHANNES HEIDENHAIN GMBH: Método para la transferencia de datos entre un dispositivo de medición de posición y una unidad de procesamiento asignada en el cual datos […]