CAMARA TOMAVISTAS ROBOTIZADA, PARA EXPLORACION SUBACUATICA.
1. Cámara tomavistas robotizada, para exploración subacuática,
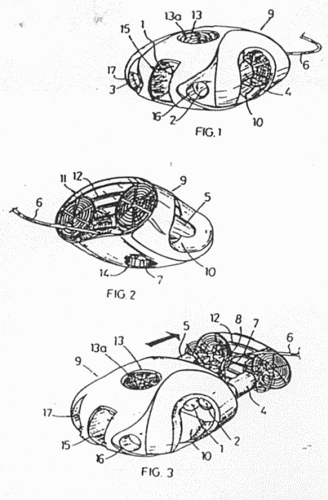
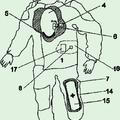
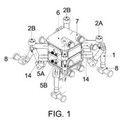
caracterizada por estar constituida por un bloque formado por una cámara de giro angular captadora dé imágenes, preferentemente del tipo de visionado o registrado inmediato, junto con dos focos para iluminación, situados simétricamente a ambos lados del eje de la cámara, ubicándose en la parte posterior del conjunto dos propulsores eléctricos del tipo de hélice con inversión de giro, con cuyo impulso el conjunto se desplazará horizontalmente en ambos sentidos y ubicándose en la parte central un tercer propulsor del mismo tipo, con su eje dispuesto verticalmente, con respecto al plano de los anteriores propulsores, con cuyo impulso el conjunto se desplazará también en ambos sentidos verticalmente, caracterizándose además y principalmente por el hecho de que todo este conjunto de cámara y propulsores a hélices, junto con sus accesorios de accionamiento y control, forman todos ellos un bloque solidario, susceptible de ser extraído, por deslizamiento, por la parte posterior del carenado exterior que envuelve y protege al mencionado bloque, de modo que queden todos y cada uno de sus elementos accesibles para cualquier operación de limpieza, mantenimiento, revisión o reparación.
2. Cámara tomavistas robotizada, para exploración subacuática, según la reivindicación anterior, caracterizada porque el carenado exterior y protector del conjunto está constituido por un cuerpo oblongo y de líneas acusadamente hidrodinámicas, el cual envuelve la totalidad de los elementos que constituyen el bloque, y presenta sendas aberturas coincidentes una con la ubicación de los propulsores posteriores, otras dos situadas en la cara superior e inferior del mencionado carenado, coincidentes con el propulsor vertical, y finalmente otras dos, una a cada lado del mismo, dispuestas todas ellas de modo que permitan, por la acción de las hélices de los propulsores sobre el agua el establecimiento del flujo, y el oportuno desplazamiento del conjunto robotizado.
Tipo: Resumen de patente/invención.
Solicitante: PRAESENTIS, S.L.
Nacionalidad solicitante: España.
Provincia: BARCELONA.
Inventor/es: TEIXIDOR CALSINA,JORDI.
Fecha de Solicitud: 25 de Enero de 2002.
Fecha de Publicación: .
Fecha de Concesión: 20 de Septiembre de 2002.
Clasificación Internacional de Patentes:
- B63C11/48 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63C BOTADURA, VARADO, O PUESTA EN DIQUE SECO DE BUQUES; SALVAMENTO EN LA MAR; EQUIPOS PARA PERMANECER O TRABAJAR BAJO EL AGUA; MEDIOS DE LOCALIZACION O RECUPERACION DE OBJETOS SUMERGIDOS (redes flotantes, rampas de amerizaje flotantes o dispositivos similares para la recuperación de aviones del agua B63B 35/52). › B63C 11/00 Equipo para permanecer o trabajar bajo el agua; Medios para buscar objetos sumergidos (composiciones químicas para utilizarlas en aparatos de respiración A62D 9/00; accesorios o equipos para la natación A63B 31/00 - A63B 35/00; submarinos B63G 8/00). › Medios para buscar objetos sumergidos (medios para señalizar el emplazamiento de objetos hundidos B63C 7/26; aparatos de sondeo sónico G01S).
Patentes similares o relacionadas:
DISPOSITIVO ROBOTICO SUMERGIBLE PARA CAPTURA DE IMAGEN, del 4 de Octubre de 2018, de FUNDACION UNIVERSIDAD DE BOGOTA JORGE TADEO LOZANO: Se relaciona la presente invención con el ramo de la ingeniería mecánica, particularmente con un dispositivo robótico sumergible que se desplaza sobre cables de […]
CONJUNTO DE ESCANEO POR LÁSER, VEHÍCULO Y PROCEDIMIENTO DE ESCANEO POR LÁSER CORRESPONDIENTES, del 27 de Septiembre de 2018, de UNIVERSITAT DE GIRONA: Conjunto de escaneo por láser, vehículo y procedimiento de escaneo por láser correspondientes. La invención obtiene una caracterización geométrica de la forma de […]
 Maniquí con sistema de localización para ayuda en operaciones de rescate de personas y naves en el mar, del 4 de Enero de 2016, de SAVE-DUMMY, S.L: La presente invención se refiere a un dispositivo configurado para la búsqueda de náufragos y naves en operaciones de rescate, consistiendo en términos generales […]
Maniquí con sistema de localización para ayuda en operaciones de rescate de personas y naves en el mar, del 4 de Enero de 2016, de SAVE-DUMMY, S.L: La presente invención se refiere a un dispositivo configurado para la búsqueda de náufragos y naves en operaciones de rescate, consistiendo en términos generales […]
 Robot submarino modular, del 29 de Diciembre de 2014, de UNIVERSIDAD POLITECNICA DE MADRID: Robot submarino modular.
La presente invención trata de un robot submarino modular con una pluralidad de brazos que es transformable en ROV para trabajos […]
Robot submarino modular, del 29 de Diciembre de 2014, de UNIVERSIDAD POLITECNICA DE MADRID: Robot submarino modular.
La presente invención trata de un robot submarino modular con una pluralidad de brazos que es transformable en ROV para trabajos […]
Vehículo sumergible operado de forma remota, del 8 de Octubre de 2014, de Lotz, Jeffrey Paul: Un vehículo sumergible operado de forma remota comprende, un cuerpo externo que comprende un puerto de carga , un eje central , un puerto […]
Pértiga de busqueda y recuperación de personas y bienes, del 10 de Junio de 2014, de REYES TELLEZ , Ricardo: 1. Pértiga de búsqueda y recuperación de personas y bienes, caracterizada por comprender una pluralidad de tramos intercambiables, acoplados entre sí con uniones o juntas […]
 APARATO Y METODO PARA VALORAR UN FONDO DE AMARRE, del 14 de Junio de 2012, de BRUPAT LIMITED: DISPOSITIVO QUE PRODUCE DATOS DE MEDIDA CAPACES DE CARACTERIZAR UNA TRAYECTORIA SUBTERRANEA TRAZADA EN UN LECHO MARINO , Y CAPAZ TAMBIEN […]
APARATO Y METODO PARA VALORAR UN FONDO DE AMARRE, del 14 de Junio de 2012, de BRUPAT LIMITED: DISPOSITIVO QUE PRODUCE DATOS DE MEDIDA CAPACES DE CARACTERIZAR UNA TRAYECTORIA SUBTERRANEA TRAZADA EN UN LECHO MARINO , Y CAPAZ TAMBIEN […]
MANIQUI CON SISTEMA DE LOCALIZACION PARA AYUDA EN OPERACIONES DE RESCATE DE PERSONAS Y NAVES EN EL MAR, del 14 de Febrero de 2012, de SAVE-DUMMY, S.L: La presente invención se refiere a un dispositivo configurado para la búsqueda de náufragos y naves en operaciones de rescate, que consiste en un maniquí […]