DESLIZADOR DE CUERDA PARA TRABAJOS VERTICALES.
1. Deslizador de cuerda para trabajos verticales, que estando especialmente concebido para apoyar sobre el borde superior de un muro,
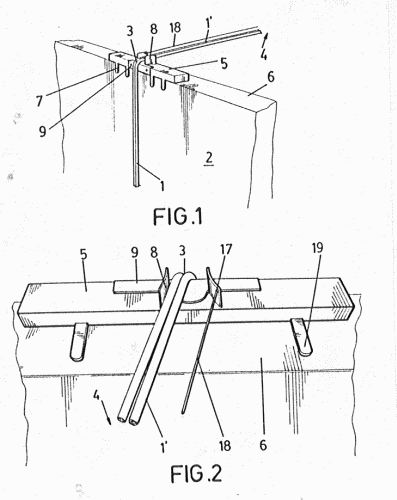
sobre el frontal de una cubierta o similar, y teniendo como finalidad establecer el punto de apoyo para la cuerda, donde ésta sufre una inflexión en su trayectoria, entre el tramo vertical y descendente del que queda suspendido el operario durante los trabajos a realizar en el muro o fachada y el punto de fijación previsto para dicha cuerda, se caracteriza por estar constituido a partir de un cuerpo alargado y relativamente plano, destinado a apoyar sobre el paramento en cuestión, de longitud adecuada como para establecer un reparto de esfuerzos que evite el daño de dicho paramento por efecto del peso del operario y de un material relativamente blando, con la misma finalidad, como por ejemplo plástico o madera, habiéndose previsto que dicho cuerpo alargado incorpore sobre la zona media de su cara superior una guía para paso de la cuerda, operativamente enfrentado a la cual y sobre el borde frontal del cuerpo se establece un elemento anti-fricción sobre el que apoya la cuerda en su punto de inflexión.
2. Deslizador de cuerda para trabajos verticales, según reivindicación 1ª caracterizado porque el citado cuerpo incorpora, o bien un perfil diédrico, o bien patillas inferiores prolongación de su borde frontal, en orden a determinar un tope posicionador que mantenga el deslizador en posición de trabajo frente a la tendencia al desplazamiento hacia atrás del mismo generada por el peso soportado por la cuerda.
3. Deslizador de cuerda para trabajos verticales, según reivindicaciones anteriores, caracterizado porque la citada guía superior se materializa a su vez en patillas ascendentes, convenientemente distanciadas, monopieza con el cuerpo base o debidamente fijadas al mismo, presentando los elementos integrantes de la guía un distanciamiento adecuado para el paso de la cuerda y siendo dicha línea divergente hacia atrás para absorber posibles desalineaciones entre el punto previsto para el descenso vertical de la cuerda y el punto de fijación de la extremidad superior de la misma.
4. Deslizador de cuerda para trabajos verticales, según reivindicaciones anteriores, caracterizado porque el elemento anti-fricción se materializa en una pieza angular, de un material duro, liso y resistente, como por ejemplo plástico, que se fija con carácter recambiable al cuerpo base y que preferentemente presenta su arista de apoyo para la cuerda redondeada.
5. Deslizador de cuerda para trabajos verticales, según reivindicaciones 1ª a 3ª, caracterizado porque el elemento anti- fricción se materializa en un rodillo montado con libertad de giro en una escotadura operativamente practicada en el borde frontal del cuerpo base, con carácter recambiable.
6. Deslizador de cuerda para trabajos verticales, según reivindicaciones anteriores, caracterizado porque en una patilla adecuada de las anteriormente citadas incorpora un pequeño orificio para fijación de una cuerdecilla que, fijada también a cualquier punto adecuado del edificio, evita la caía al vacío del deslizador ante un eventual desacoplamiento del mismo con respecto a su zona de trabajo.
7. Deslizador de cuerda para trabajos verticales, según reivindicaciones anteriores, caracterizado porque el cuerpo base presenta una anchura suficiente para evitar la basculación accidental del mismo durante la maniobra de elevación o recogida de la cuerda, o bien incorpora como prolongación de su borde posterior, patillas que potencian su superficie de apoyo, con la misma finalidad.
Tipo: Resumen de patente/invención.
Solicitante: LOBO JIMENEZ,FERNANDO.
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: LOBO JIMENEZ,FERNANDO.
Fecha de Solicitud: 26 de Septiembre de 2000.
Fecha de Publicación: .
Fecha de Concesión: 5 de Julio de 2001.
Clasificación Internacional de Patentes:
- E04G21/04 CONSTRUCCIONES FIJAS. › E04 EDIFICIOS. › E04G ANDAMIAJES; MOLDES; ENCOFRADOS; HERRAMIENTAS O ACCESORIOS PARA LA CONSTRUCCION, O SU EMPLEO; MANIPULACIÓN DE LOS MATERIALES DE CONSTRUCCION EN LA PROPIA OBRA; REPARACION, DEMOLICION U OTROS TRABAJOS EN EDIFICIOS CONSTRUIDOS. › E04G 21/00 Preparación, transporte o trabajo de los materiales o de elementos de construcción in situ ; Otros dispositivos o medidas concernientes a los trabajos de construcción (trabajo de los materiales análogos a la piedra B28D; transporte en general B65G; aparatos de elevación B66; instrumentos de medida G01). › Dispositivos para transportar y distribuir simultáneamente (bombas para hormigón F04).
Patentes similares o relacionadas:
SISTEMA DE CONSTRUCCIÓN ROBOTIZADO, del 17 de Octubre de 2019, de EVOLUTION CONSTRUCTION SYSTEM, S.L: Sistema de construcción robotizado que comprende un robot cartesiano que puede ser elevado de manera automática según la construcción va ganando altura, que […]
ROBOT PARA REFORMAS Y REHABILITACIONES, del 17 de Octubre de 2019, de EVOLUTION CONSTRUCTION SYSTEM, S.L: Robot para reformas y rehabilitaciones de edificios que comprende una estructura de perfiles que comprende, al menos, dos largueros paralelos fijos, verticales o longitudinales, […]
SISTEMA DE CONSTRUCCIÓN ROBOTIZADO., del 10 de Octubre de 2019, de EVOLUTION CONSTRUCTION SYSTEM, S.L: Sistema de construcción robotizado que comprende un robot cartesiano tipo pórtico que puede ser elevado de manera automática según la construcción va ganando altura, que cuenta […]
ROBOT PARA REFORMAS Y REHABILITACIONES., del 10 de Octubre de 2019, de EVOLUTION CONSTRUCTION SYSTEM, S.L: Robot para restauraciones y rehabilitaciones de edificios que comprende una estructura de perfiles que comprende, al menos, dos largueros […]
Dispositivo y procedimiento de fabricación de estructuras tridimensionales realizadas en capas sucesivas, del 4 de Abril de 2019, de ROCHER, Xavier: Dispositivo de deposición de material pastoso destinado a la fabricación capa por capa de una estructura tridimensional de grandes dimensiones que comprende: - por lo menos […]
Manipulador de gran tamaño con mástil sometido a pandeo y con medios para la medición de ángulo de giro, del 12 de Marzo de 2019, de SCHWING GMBH: Manipulador de gran tamaño con un mástil sometido a pandeo desplegable, que presenta un asiento giratorio que puede girar alrededor […]
Pluma de camión bomba para hormigón y camión bomba para hormigón, del 1 de Noviembre de 2017, de Zoomlion Heavy Industry Science and Technology Co., Ltd: Una pluma de camión bomba para hormigón que tiene un estado plegado y un estado desplegado, en donde dicha pluma comprende siete secciones de pluma […]
Método y sistema para controlar un manipulador de ingeniería a gran escala, del 6 de Septiembre de 2017, de Hunan Sany Intelligent Control Equipment Co., Ltd: Método para controlar un manipulador de ingeniería a gran escala, estando dotado cada uno de los segmentos de pluma del manipulador de un mecanismo de accionamiento, […]