Sistema de visión panorámica con corrección de imagen en operaciones de repostaje y similares.
Sistema de visión panorámica con corrección de imagen en operaciones de repostaje y similares.
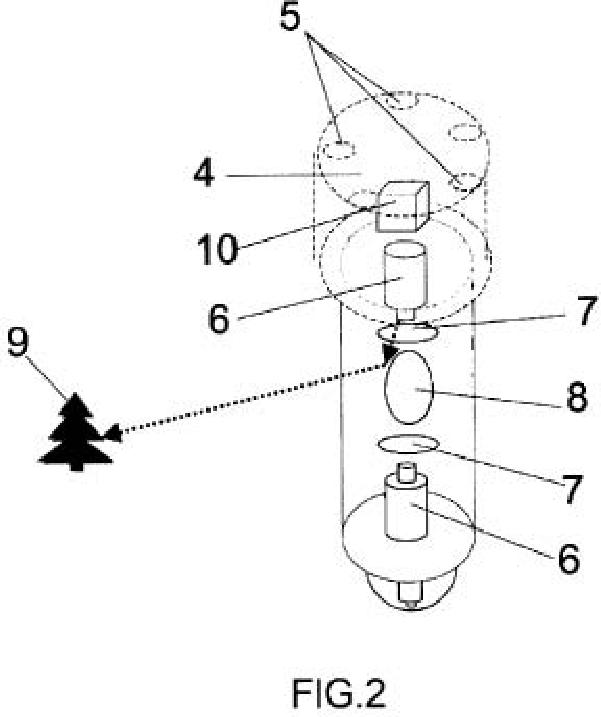
La invención se refiere a un sistema para obtener una imagen continua del entorno de una operación como la de repostaje en vuelo a partir de una cámara (6) (o dos en caso de pretender un sistema redundante, ya que la geometría de la invención así lo permite) basado en una colocación vertical de la misma y enfocada verticalmente hacia una lente compuesta (7), junto con una electrónica de adaptación de la imagen obtenida para su mapeado a un rectángulo (10) horizontal. La electrónica también incluye la implementación de un algoritmo de super resolución y un sistema de comunicaciones para transmitir las señales portadoras de la información de la imagen, una vez incrementada su resolución mediante el procedimiento indicado, todo ello incluido en una estructura mecánica en forma de cilindro (3) que permite la colocación de los elementos que forman parte del invento en las posiciones relativas adecuadas.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201400189.
Solicitante: ADARVE LOZANO, Alberto.
Nacionalidad solicitante: España.
Inventor/es: ADARVE LOZANO,Alberto.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64D39/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64D EQUIPAMIENTO INTERIOR O ACOPLABLE A AERONAVES; TRAJES DE VUELO; PARACAIDAS; DISPOSICIONES O MONTAJE DE GRUPOS MOTORES O DE TRANSMISIONES DE PROPULSION EN AERONAVES. › Repostaje en vuelo (llenado o vaciado de depósitos de combustible B64D 37/14).
- G06F19/00
- G06T5/50 FISICA. › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › G06T 5/00 Perfeccionamiento o restauración de imagen. › utilizando varias imágenes, p. ej. promedio, resta.
- H04N5/232 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04N TRANSMISION DE IMAGENES, p. ej. TELEVISION. › H04N 5/00 Detalles de los sistemas de televisión (Detalles de los dispositivos de análisis o sus combinaciones con la producción de la tensión de alimentación H04N 3/00). › Dispositivos para el control de las cámaras de televisión, p. ej. control a distancia (H04N 5/235 tiene prioridad).
Fragmento de la descripción:
OBJETO DE LA INVENCiÓN
La presente invención se refiere a un sistema de visión panorámica con corrección de imagen, previsto para la obtención de una visión continua del entorno en, por ejemplo, operaciones de repostaje y en operaciones criticas.
El objeto de la invención es conseguir una reducción del número de cámaras necesarias para la visión panorámica, al tiempo de mantener una imagen global sin discontinuidades y con posibilidad de redundancia, necesaria en todas aquellas situaciones en las que se pretende monitorizar operaciones con un cierto nivel de criticidad, todo ello en orden a facilitar la operación de supervisión.
ANTECEDENTES DE LA INVENCiÓN
En algunas aeronaves que realizan repostaje en vuelo, o en otros puntos con necesidades estratégicas similares, es necesario disponer de una imagen que permita obtener información de todos los alrededores del sistema mediante el empleo de cámaras. Dichas operaciones de repostaje se pueden llevar a cabo mediante mangueras y cestas o mediante el uso de un Boom o dispositivo de suministro de combustible de alto caudal.
El número de aeronaves involucradas en un repostaje puede ser múltiple y las mismas pueden repostar en distintos puntos del avión tanquero incluso al mismo tiempo. Es por lo tanto muy deseable tener una imagen general del escenario de las operaciones, que puede ayudar enormemente a evitar colisiones y a coordinar dichas operaciones de una forma ordenada y controlada.
Generalmente se emplean varias cámaras para obtener la imagen panorámica deseada. Las imágenes procedentes de las mismas se unen en uno o más monitores para proporcionar la imagen global indicada.
Cuando las cámaras empleadas son de alto coste, el reducir este número implica una reducción importante del coste del sistema completo y la utilización de una sola cámara para obtener una imagen global del entorno significa una reducción significativa a valorar.
Otro factor de considerable relevancia, es la obtención una imagen lo más continua posible Y sin distorsiones apreciables que permita, con un solo vistazo, ver la posición de todos los aviones que en ese momento se puedan encontrar en el escenario de la operación.
En la actualidad, los sistemas que generan una imagen del entorno de la operación u operaciones de repostaje están basados en el empleo de varias cámaras, generalmente tres, con unos ángulos de visión de alrededor de los ochenta grados sexagesimales en el plano horizontal, junto con el ángulo correspondiente en el plano vertical de acuerdo a su relación de aspecto, que permiten obtener sendas imágenes del entorno y componerlas bien electrónicamente o geométricamente en correspondientes monitor o monitores, generalmente también tres, que proporcionan la visión general de conjunto de los alrededores de la zona de repostaje.
Las imágenes procedentes de dichas cámaras adolecen del defecto de no proporcionar imágenes continuas del entorno debido a que las mismas están colocadas en puntos diferentes del espacio. El resultado es que las imágenes contienen zonas duplicadas, entre otros defectos, dando lugar a la aparición de partes de los aviones implicados en el repostaje que se repiten en dos monitores a la vez. Además, en ciertas ocasiones la zona importante de la operación cae en aquellas zonas de intersección entre las visiones de cámaras adyacentes, lo que lleva a un esfuerzo y una incomodidad por partre del operador
o supervisor de la operación que tiene que componer mentalmente las imágenes de dos monitores adyacentes para tener una imagen completa de algunos de los aviones a repostar o de la zona de interés.
Un: como el anterior se describe dentro de la patente US 20110147529 A1.
También las cámaras empleadas son duplicadas con el fin de tener una imagen de día y otra de noche que permitan las operaciones de repostaje durante ambos intervalos de tiempo. Todo esto da lugar a un sistema de seis cámaras implicadas en la obtención de la imagen de interés. Igualmente, y debido a la sensibilidad de las cámaras nocturnas, es necesario el empleo de iluminadores, no visibles con el ojo desnudo, para obtener los fotones suficientes que permitan, durante la noche, disponer de imágenes de suficiente calidad.
Todo lo anterior termina, poco a poco con una tendencia a emplear cámaras de mayor sensibilidad e incluso con un funcionamiento en rangos del espectro de iluminación que estén fuera de aquellos fácilmente alcanzables para el ciudadano de a pie puesto que se trata de operaciones generalmente de alto valor táctico y de carácter militar.
En definitiva todo apunta al empleo de cámaras de alto precio, cuyo número es de alto interés poder reducir al tiempo que poder mejorar la calidad, uniformidad y continuidad de la imagen obtenidas.
DESCRIPCiÓN DE LA INVENCiÓN
El sistema de la invención está previsto para utilizar una o dos únicas cámaras para la supervisión alrededor de toda la aeronave, de manera que el empleo de una de las cámaras es suficiente para obtener una imagen panorámica de todo el contorno, permitiendo emplear dos cámaras por redundancia, ya que esta es necesaria en ciertas operaciones para garantizar que un fallo simple no implique la suspensión de la operación, viéndose al mismo tiempo aumentada la fiabilidad del sistema.
La reducción del número de cámaras a una sola, lleva aparejada una reducción en la resolución, en número total de píxeles, de la imagen global de entorno. Es más, el empleo de una cámara para obtener una imagen panorámica alrededor de nuestro punto de referencia implica no sólo repartir los píxeles del sensor de la misma entre toda la zona a supervisar sino que además la forma del sensor, por lo general rectangular, implica un desperdicio adicional de píxeles debido a que la imagen proyectada por nuestra lente es circular. También la zona central de este círculo, tampoco puede ser aprovechada, puesto que refleja la imagen de la propia cámara utilizada y no es parte del entorno de interés. Todo lo anterior implica una reducción considerable de la resolución media de nuestra imagen que debe y puede ser compensada como se explicará a continuación y que forma parte del objeto de esta invención.
El sistema básico propuesto consta una cámara en disposición vertical aunque en su implementación preferida se emplean dos cámaras para proporcionar redundancia al sistema y porque la geometría de la invención así lo permite.
Las dos cámaras se disponen en posición vertical aunque en sentidos diferentes ambas apuntando a sendos lados junto con el empleo de dos lentes que generan una vista de 360 grados alrededor del eje de las mismas.
Una vez obtenida la imagen periférica habrá que compensar la deformación introducida por todas las lentes. Esto se realiza mediante un circuito basado en fpga programado a ese fin, de manera que a partir de los valores de los píxeles obtenidos genera mediante un algoritmo de transformación geométrica la imagen rectangular del entorno que se requiere a partir de la corona circular de origen.
Finalmente se obtiene una imagen rectangular de la panorámica circundante. A ésta habrá que someterla a un algoritmo de super-resolución que mejore la calidad de las imágenes obtenidas.
Podremos desplazar la imagen en el monitor para observarla desde puntos que permitan fácilmente determinar cualquier situación de colisión con otras aeronaves. Y así tener una vista de situación global que contemplará observaciones completas y con una menor carga de trabajo con respecto a aquellas proporcionadas por varias cámaras ubicadas en el fuselaje.
Concretamente, el sistema de la invención permite obtener una imagen de calidad, continua y sin duplicidades de fragmentos de la misma, de hasta 3600 alrededor del propio sistema, permitiendo conocer el estado de ocupación del espacio que circunda a un avión que realiza operaciones de repostaje, con el fin de evitar colisiones entre las aeronaves y equipos involucradas en dichas operaciones así como conseguir una mejor coordinación de tales operaciones.
En lo que se refiere al montaje del sistema, el mismo irá situado en la parte inferior central del avión tanque, es decir desde el cual se realiza el repostaje, comprendiendo las siguientes partes fundamentales:
1. Una caja estructural que soporta y contiene todos los elementos que conforman el resto del sistema al tiempo que los mantiene en las posiciones adecuadas necesarias para obtener las imágenes que se desean mientras confiere al conjunto una forma con características adecuadas desde el punto de vista aerodinámico.
2. Preferentemente, dicha caja tiene forma cilíndrica, dispuesta verticalmente,...
Reivindicaciones:
1a ._ Sistema de visión panorámica con corrección de imagen, que estando ideada para obtener una visión continua del entorno, por ejemplo en operaciones de repostaje y en operaciones críticas, caracterizado porque comprende al menos una cámara (6) dispuesta de forma vertical, enfocando en forma perpendicular a la dirección de vuelo de la correspondiente aeronave (1) , en combinación con una lente (7) proyectando la imagen sobre un sensor, obteniendo una imagen en todo el entorno con un campo de visión vertical determinado por la forma de la lente (7) , en donde la visión periférica es susceptible de alcanzar hasta los 3600 alrededor del propio sistema; habiéndose previsto una electrónica de mapeado de la imagen obtenida a través de la lente, con el fin de eliminar cualquier distorsión y mejorar a la vez su resolución y calidad.
2a . Sistema de visión panorámica con corrección de imagen, según reivindicación 1a, caracterizado porque los elementos que participan en el conjunto del sistema están dispuestos en el interior de un cuerpo cilíndrico (3) .
3a ._ Sistema de visión panorámica con corrección de imagen, según reivindicación 1a, caracterizado porque comprende dos cámaras (6) , iguales pero orientadas en sentidos contrarios, con sus correspondientes lentes (7) alojadas axial mente en el interior del cuerpo cilíndrico (3) , complementándose con la electrónica de transmisión de las señales de las cámaras (6) .
4a ._ Sistema de visión panorámica con corrección de imagen, según reivindicación 1a, caracterizado porque la lente (7) de la cámara (6) está formada por un espejo de forma cónica y una lente adicional para enfocar la imagen obtenida sobre el sensor de la cámara.
5a ._ Sistema de visión panorámica con corrección de imagen, según reivindicación 1a, caracterizado porque la lente (7) de la cámara (6) está formada por un espejo de forma parabólica, complementándose con una lente adicional para enfocar la imagen obtenida sobre el sensor de la cámara.
6a. Sistema de visión panorámica con corrección de imagen, según reivindicación 1a,
caracterizado porque la lente (7) de la cámara (6) está formada por un espejo de formada por un espejo de forma hiperbólica, complementándose con una lente adicional para enfocar la imagen obtenida sobre el sensor de la cámara.
7a ._ Sistema de visión panorámica con corrección de imagen, según reivindicación 1a, caracterizado porque la lente (7) de la cámara (6) está formada por un espejo en forma de paraboloide, complementándose con una lente adicional para enfocar la imagen obtenida sobre el sensor de la cámara.
8a. Sistema de visión panorámica con corrección de imagen, según reivindicación 1a, caracterizado porque la lente (7) de la cámara (6) está formada por un espejo de forma esférica, complementándose con una lente adicional para enfocar la imagen obtenida sobre el sensor de la cámara.
9a ._ Sistema de visión panorámica con corrección de imagen, según reivindicación 1a, caracterizado porque la lente (7) de la cámara (6) es una lente compuesta, de gran angular.
10a. Sistema de visión panorámica con corrección de imagen, según reivindicación 1a, caracterizado porque la transmisión de la señal por parte del sistema es de tipo óptico por fibra.
a. Sistema de visión panorámica con corrección de imagen, según reivindicación 1a, caracterizado porque la electrónica se complementa con un sub-sistema de mejora de la resolución de la imagen obtenida por medio de un circuito programable basado en FPGAs.
12a. Sistema de visión panorámica con corrección de imagen, según reivindicación 1a, caracterizado porque los algoritmos a emplear se implementan en una electrónica basada en circuitos programados (FPGAs) .
13a. Sistema de visión panorámica con corrección de imagen, según reivindicación 1a, caracterizado porque los algoritmos a emplear se implementan mediante software y ejecutados mediante procesadores previstos al efecto.
14a. Sistema de visión panorámica con corrección de imagen, según reivindicación 1a,
caracterizado porque el sistema es susceptible de incluir más de dos cámaras dispuestas en el mismo eje vertical (6) .
15a. Sistema de visión panorámica con corrección de imagen, según reivindicación 1a, caracterizado porque una de las cámaras (6) es de visión en color, mientras que la otra es de visión en el espectro fuera del espectro visible por el ojo humano.
16a. Sistema de visión panorámica con corrección de imagen, según reivindicación 1a,
caracterizado porque el mapeado de la imagen se realiza mediante un procesador complementado con un software específico.
17a ._ Sistema de visión panorámica con corrección de imagen, según reivindicación 1a, caracterizado porque el cuerpo cilíndrico (3) es susceptible de rotar alrededor de un eje 15 vertical, orientando el sistema en el plano horizontal paralelo al avión.
Patentes similares o relacionadas:
Retenedor para dispositivo de aumento electrónico, del 15 de Julio de 2020, de FREEDOM SCIENTIFIC INC.: Un dispositivo de aumento para su uso por usuarios ciegos o con baja visión, incluyendo el dispositivo de aumento una mesa que tiene un borde delantero, […]
Dispositivo de imágenes para escenas en movimiento aparente, del 17 de Junio de 2020, de Urugus S.A: Un aparato para obtener imágenes de una escena que tiene movimiento aparente, el aparato que comprende: un dispositivo de imágenes de área […]
Dispositivo que comprende un dispositivo de imágenes multicanal y procedimiento para producirlo, del 3 de Junio de 2020, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Un dispositivo que comprende: una carcasa que tiene una primera área transparente (14a) y una segunda área transparente (14b); […]
Dispositivo de ajuste de eje óptico de cámara, y cámara que lo tiene, del 27 de Mayo de 2020, de Hangzhou Hikmicro Sensing Technology Co., Ltd: Un dispositivo de ajuste de eje óptico de cámara, caracterizado porque se usa para ajustar un sistema de eje óptico de cámara y comprende: un soporte […]
Enfoque para escena de fuente de luz puntual, del 15 de Abril de 2020, de Zhejiang Uniview Technologies Co., Ltd: Un procedimiento de enfoque, que comprende: establecer posiciones de una lente de enfoque secuencialmente; registrar información estadística […]
Procedimiento de fotografía usando un dispositivo electrónico externo y dispositivo electrónico que soporta el mismo, del 1 de Abril de 2020, de SAMSUNG ELECTRONICS CO., LTD.: Un dispositivo electrónico que comprende: un circuito de comunicación; una memoria configurada para almacenar contenidos que incluyen una cuarta imagen en la que se […]
Procedimiento y aparato de grabación de imagen de vídeo en un terminal portátil que tiene doble cámara, del 1 de Abril de 2020, de SAMSUNG ELECTRONICS CO., LTD.: Un procedimiento de grabación de vídeo por un terminal portátil de doble cámara , que comprende: emitir un primer flujo de vídeo capturado por una primera […]
Técnicas para enfocar automáticamente una cámara digital, del 18 de Marzo de 2020, de QUALCOMM INCORPORATED: Un dispositivo de comunicación inalámbrica configurado para comunicaciones inalámbricas, el cual comprende: una memoria configurada para […]