Sistema y método para escanear una superficie y programa de ordenador que implementa el método.
Sistema y método para escanear una superficie y programa de ordenador que implementa el método.
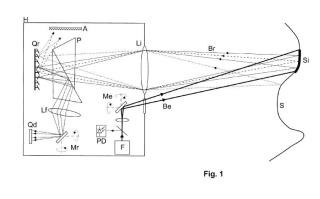
El sistema comprende:- medios para iluminar, con un haz de luz (Be), diferentes sub-áreas (Si) de una superficie (S), de manera alternada, y
-- medios para recibir y detectar las porciones de luz reflejada (Br) en las mismas, que incluyen:
- uno o más detectores de luz (D); y
- unos medios de redirección de luz que incluyen una cuadrícula (Qr) de elementos de redirección de luz (GM), que reciben las porciones de luz reflejada (Br) y las redirigen, de manera secuencial, hacia el detector o detectores de luz (D).
El método está adaptado para realizar las funciones llevadas a cabo por el sistema de la invención.
El programa de ordenador implementa el método de la invención.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201330185.
Solicitante: UNIVERSITAT POLITECNICA DE CATALUNYA.
Nacionalidad solicitante: España.
Inventor/es: ROYO ROYO,SANTIAGO, RIU GRAS,Jordi.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S17/89 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › para la cartografía o la formación de imágenes.
Fragmento de la descripción:
Sistema y método para escanear una superficie y programa de ordenador que implementa el método.
Sector de la técnica
La presente invención concierne en general, en un primer aspecto, a un sistema para escanear una superficie, que comprende medios para iluminar diferentes regiones de una superficie a escanear y medios para recibir y detectar las porciones de luz reflejada en las mismas que incluyen uno o más detectores de luz, y más en particular a un sistema que permite utilizar la resolución espacial total del detector o detectores de luz para cada una de las regiones de la superficie a escanear.
Un segundo aspecto de la invención concierne a un método adaptado para realizar las funciones llevadas a cabo por el sistema del primer aspecto.
Un tercer aspecto de la invención concierne a un programa de ordenador que implementa el método del segundo aspecto.
Estado de la técnica anterior
Los sistemas de medida TOF (acrónimo de "Time Of Flight": Tiempo de vuelo), LIDAR (acrónimo de "Light detection and ranging") o LADAR (acrónimo de "Láser detection and ranging") son sistemas que permiten la medida de distancias mediante la utilización de una fuente de luz que ilumina los puntos bajo medida.
La distancia medible en sistemas TOF está influenciada por algunos factores no controlados que dependen del entorno y no de la técnica de TOF, como por ejemplo la intensidad de la iluminación de fondo, las condiciones meteorológicas (niebla, polvo, lluvia, etc.) o la reflectancia del objeto.
Por otro lado, hay otros aspectos que son directamente dependientes de la tecnología y la arquitectura del dispositivo de TOF y tienen un papel principal en la determinación de la distancia medible de cada sistema. De entre dichos aspectos, los más significativos podrían ser la potencia de la fuente de iluminación, la divergencia del haz de luz, la eficiencia del sistema de escaneado de puntos, la sensibilidad de los foto- detectores, la atenuación del sistema óptico o la calidad del filtrado de la luz de fondo.
Los principios físicos de los sistemas TOF, LIDAR o LADAR constatan que, expresado de forma muy genérica, la capacidad de medir un punto ubicado a una cierta distancia está relacionada con la capacidad de iluminarlo con potencia óptica suficiente para detectar el haz de luz reflejada en el mismo en un detector de luz. Este principio tiene una influencia determinante en la distancia medible del dispositivo y sobre el se han diseñado diferentes técnicas de escaneo para realizar mediciones de imágenes TOF. Existen dispositivos TOF que pueden medir distancias de hasta docenas de kilómetros y otros se limitan a unos pocos metros. Normalmente, el haz iluminador en los sistemas de larga distancia tiene poca divergencia. Estos suelen utilizar haces de luz láser altamente colimados con una divergencia y una sección de haz muy reducida. Con esto se consigue que la concentración de energía por unidad de superficie en el objeto sea mucho mayor si se compara con los sistemas que utilizan fuentes de luz divergentes. Los sistemas que utilizan fuentes de luz divergentes iluminan áreas mayores para medir de forma simultánea un conjunto de puntos en lugar de uno solo.
Para realizar mediciones de imagen tridimensional mediante técnicas de TOF, LIDAR o LADAR, es necesario medir un conjunto de puntos que conformen una imagen tridimensional (o nube de puntos) y para ello es necesario iluminar la superficie que corresponde a la imagen que se pretende medir. Las tecnologías que permiten medir de forma controlada un conjunto de puntos para formar imágenes tridimensionales se dividen básicamente en dos:
- Sistemas de escaneado secuencial.
- Sistemas basados en matrices de detectores.
Los sistemas de escaneado secuencial forman la imagen 3D midiendo puntos únicos de forma secuencial. La secuencia de iluminación es implementada normalmente mediante sistemas ópticos tales como espejos galvanométricos, MEMS, deflectores acusto-ópticos, etc... Dada una potencia óptica concreta, los sistemas de escaneo secuencial concentran dicha potencia en un punto de tamaño reducido consiguiendo medir distancias mayores en comparación con los sistemas que expanden el haz. La colimación y el pequeño tamaño del punto iluminado hace que la concentración de energía por unidad de superficie sea mas elevada que en el caso de fuentes de luz divergentes. Esta alta concentración de energía por unidad de superficie hace que la luz reflejada por el objeto sea mayor y en consecuencia, el detector que recibe la luz procedente de ese punto también reciba una cantidad de luz mayor. Tendiendo en cuenta que uno de los factores principales que fija la limitación de capacidad de medida en distancia en sistemas LIDAR es la capacidad de detectar haces ópticos reflejadas de baja potencia, el efecto de concentración de energía de los sistemas de escaneo secuencial consigue maximizar la distancia medióle gracias al aprovechamiento de toda la potencia óptica disponible para un solo punto de medida. A mayor concentración de energía por unidad de superficie, más flujo de energía es reflejado en el punto de medida y por consiguiente, más fácil es la detección. Si bien los sistemas de escaneo secuencial permiten obtener una alta resolución espacial en la imagen tridimensional, al realizarse la medida punto a punto, hace que para conseguir imágenes de alta resolución espacial el tiempo de medida total sea elevado. Esto limita la cantidad de imágenes por segundo que pueden medir. A nivel de ejemplo, se pueden citar equipos comerciales basados en esta tecnología como los escáneres láser de Riegl ( http://www.heql.com/ ), MDL ( http://www.mdl-laser.com ) o Faro ( http://www.faro.com ).
Por otro lado, existen los sistemas basados en matrices de detectores. Estos utilizan un conjunto de detectores dispuestos en cuadrícula en la que cada uno de ellos tiene capacidad de medida TOF, ya sea basada en TOF pulsado, TOF-FMCW o TOF- "Range Gated". En estos sistemas, los puntos de la imagen tridimensional son medidos de forma simultánea a través de un conjunto de detectores. Es decir, de forma sincronizada dichos detectores miden un conjunto de valores de distancia equivalente al número de detectores de la matriz y, a la vez, ese conjunto de puntos medidos conforma una imagen tridimensional. La principal ventaja de estos sistemas reside en que se realizan multitud de medidas de forma simultánea permitiendo medir una imagen completa a través de una única acción de medida TOF. Por ejemplo, en el caso de TOF pulsado, se podrá medir una imagen tridimensional completa a través de un solo pulso de láser (no obstante, algunos equipos utilizan mas de un pulso para
incrementar la calidad de la imagen a través de integración de medida sucesivas).
Una condición necesaria para realizar medidas simultaneas a través de una matriz de detectores (de forma parcial o total, es decir, utilizando la totalidad de la matriz o solo una parte de ella) implica ¡luminar de forma simultanea todos esos puntos en el objeto que serán medidos por el grupo de detectores. Esto implica que la potencia óptica se divide entre todos los puntos. Por lo tanto, dada una fuente de iluminación de una energía concreta, la concentración de energía por unidad de superficie será repartida entre todos los puntos de medida haciendo que la energía reflejada por cada punto individual sea inversamente proporcional al número de puntos medidos. A nivel de ejemplo se puede citar los sistemas "Flash LADAR" de la compañía Advanced Scientific Concepts ( http://www.advancedscientificconcepts.com/ ). las cámaras TOF pulsadas de Odos Imaging ( http://odos-imaqing.com/ ). así como la gran mayoría de cámaras TOF basadas en medida TOF-FMCW (Time-of-Flight Frequency Modulated Continuous Waveform), por ejemplo las cámaras de Mesa Imaging ( www.mesa- imaging.ch ), PMD ( www.pmdtec.com ) o SoftKinetic ( http://www.softkinetic.com ).
La principal ventaja de este sistema respecto a los sistemas de escaneo secuencial reside en que la medida de puntos se hace en paralelo consiguiendo medir un número elevado de puntos para cada acción de medida TOF. En cambio, los sistemas de escaneo secuencial realizan una única medida por cada acción de medida TOF. De forma genérica se puede afirmar que, considerando una fuente de iluminación de potencia determinada y compartida entre los dos sistemas, la cantidad de imágenes tridimensionales medidas será mayor para los sistemas basados en matrices de detectores que en los sistemas de medida secuencial gracias al efecto de medidas en paralelo. No obstante, dado que la energía de iluminación es finita y, en este caso comparativo, igual entre los dos sistemas, la distancia medida será mayor en el sistema de escaneo...
Reivindicaciones:
1. Sistema para escanear una superficie, que comprende:
- unos medios de iluminación configurados y dispuestos para proyectar sobre una superficie a escanear (S) al menos un haz de luz (Be) con una divergencia determinada para iluminar una sub-área (Si) del área que constituye dicha superficie a 5 escanear (S) , la cual es al menos en parte reflectante;
- unos medios de dirección de luz asociados a dichos medios de iluminación configurados para dirigir dicho haz de luz (Be) para que ilumine diferentes sub-áreas de la superficie a escanear (S) , de manera alternada; y - unos medios de recepción y detección configurados y dispuestos para recibir y 10 detectar, de manera alternada, correspondientes porciones de luz (Br) , de dicho haz de luz (Be) , reflejadas en cada una de dichas diferentes sub-áreas (Si) de la superficie a escanear (S) , donde dichos medios de recepción y detección comprenden al menos un detector de luz (D) ;
estando el sistema caracterizado porque: 15
dichos medios de recepción y detección comprenden unos medios de redirección de luz que incluyen una pluralidad de elementos de redirección de luz (GM) dispuestos en cuadrícula (Qr) , en un número mayor que el número de dichos detectores de luz (D) , que es al menos uno, y para recibir las porciones de luz reflejada (Br) , cada una de ellas en una respectiva sub-cuadrícula (SQr) de dicha cuadrícula 20 (Qr) ;
y porque dichos medios de redirección de luz están configurados y dispuestos para redirigir, de manera secuencial, cada una de las porciones de luz reflejada (Br) recibida en cada una de dichas sub-cuadrículas (SQr) hacia dicho detector de luz (D) , que es al menos uno. 25
2. Sistema según la reivindicación 1, caracterizado porque comprende una pluralidad de detectores de luz (D) , incluyendo a dicho detector de luz, dispuestos en cuadrícula (Qd) , estando los medios de redirección de luz configurados y dispuestos para redirigir, de manera secuencial, cada una de las porciones de luz reflejada (Br) recibida en cada una de las sub-cuadrículas (SQr) de elementos de redirección de luz 30 (GM) hacia los detectores de luz (D) dispuestos en cuadrícula (Qd) .
3. Sistema según la reivindicación 1 ó 2, caracterizado porque dichos medios de redirección de luz comprenden al menos un elemento reflectante (Mr) dispuesto entre la cuadrícula (Qr) de elementos de redirección de luz (GM) y el detector de luz (D) o la cuadrícula de detectores de luz (Qd) , que es desplazable para llevar a cabo dicha 35 redirección secuencial de cada una de las porciones de luz reflejada (Br) recibida en cada una de las sub-cuadrículas (SQr) hacia el detector de luz (D) o los detectores de luz (D) dispuestos en cuadrícula (Qd) .
4. Sistema según una cualquiera de las reivindicaciones anteriores, caracterizado porque dichos medios de dirección de luz están configurados para dirigir 40 el haz de luz (Be) de manera secuencial.
5. Sistema según una cualquiera de las reivindicaciones anteriores, caracterizado porque los medios de dirección de luz comprenden al menos un dispositivo (Me) reflectante y/o deflectante dispuesto entre el haz de luz (Be) y la superficie a escanear (S) , y que es desplazable para llevar a cabo dicha dirección alternada del haz de luz (Be) .
6. Sistema según una cualquiera de las reivindicaciones anteriores, caracterizado porque el número de elementos de redirección de luz (GM) de cada una 5 de las sub-cuadrículas (SQr) es igual al número de detectores de luz (D) .
7. Sistema según una cualquiera de las reivindicaciones 1 a 5, caracterizado porque el número de elementos de redirección de luz (GM) de cada una de las sub-cuadrículas (SQr) es superior al número de detectores de luz (D) , y porque comprende unos medios de control asociados a los medios de redirección de luz para llevar a cabo 10 la redirección de cada una de las porciones de luz reflejada (Br) recibida en cada una de las sub-cuadrículas (SQr) hacia los detectores de luz (D) , redirigiendo sub-porciones de cada porción de luz reflejada (Br) , de manera secuencial, hacia el detector o detectores de luz (D) , mediante el control independiente de correspondientes sub-grupos de elementos de redirección de luz (GM) de cada sub-cuadrícula (SQr) . 15
8. Sistema según una cualquiera de las reivindicaciones anteriores, caracterizado porque comprende unos medios de control asociados a los medios de dirección de luz y a los medios de redirección de luz para llevar a cabo tanto la dirección del haz de luz (Be) hacia las diferentes sub-áreas (Si) de la superficie a escanear (S) como la redirección de cada una de las porciones de luz reflejada (Br) 20 hacia el detector o detectores de luz (D) , de manera sincronizada.
9. Sistema según una cualquiera de las reivindicaciones anteriores, caracterizado porque cada elemento de redirección de luz (GM) está formado por un número variable de microelementos de redirección de luz.
10. Sistema según una cualquiera de las reivindicaciones anteriores, 25 caracterizado porque la cuadrícula (Qr) de elementos de redirección de luz (GM) es una cuadrícula de interruptores de luz.
11. Sistema según la reivindicación 9, caracterizado porque la cuadrícula (Qr) de elementos de redirección de luz (GM) comprende un modulador espacial de luz basado en micro espejos, una pantalla de cristal líquido o unos espejos deformables. 30
12. Sistema según una cualquiera de las reivindicaciones anteriores, caracterizado porque comprende, en asociación o como parte de los medios de recepción y detección, unos medios de medida para medir la distancia entre el sistema y cada punto de la superficie a escanear (S) mediante la determinación del tiempo de vuelo. 35
13. Sistema según la reivindicación 12, caracterizado porque dichos medios de medida están configurados para obtener una imagen tridimensional de reconstrucción topográfica mediante nube de puntos de la superficie a escanear (S) .
14. Sistema según una cualquiera de las reivindicaciones anteriores, caracterizado porque constituye o forma parte de al menos unos de los siguientes 40 sistemas:
â?" sistema de evitación de colisiones;
â?" sistema de detección y seguimiento de objetos estáticos o móviles;
â?" sistema de video vigilancia inteligente; â?" sistema de control de zonas fronterizas;
â?" sistema de visión tridimensional en sistemas inteligentes de seguridad;
â?" sistema de navegación para vehículo auto-guiado o semi-guiado supervisado; â?" sistema de vídeo multimedia 3D; 5 â?" sistema de asistencia y seguridad en la conducción; â?" sistema de transporte inteligente; â?" sistema de detección bajo follaje;
â?" sistema de mapeado;
â?" sistema de visión artificial en robótica. 10
15. Sistema según una cualquiera de las reivindicaciones anteriores, caracterizado porque al menos dichos elementos de redirección de luz (GM) y/o dicho elemento reflectante (Mr) y/o dicho dispositivo (Me) reflectante y/o deflectante están implementados mediante sistemas micro electromecánicos.
16. Método para escanear una superficie, que comprende: 15
- proyectar sobre una superficie a escanear (S) , al menos en parte reflectante, al menos un haz de luz (Be) con una divergencia determinada para iluminar una sub-área (Si) del área que constituye dicha superficie a escanear (S) , dirigiéndolo para que ilumine diferentes sub-áreas (Si) de la superficie a escanear (S) , de manera alternada; y 20
- recibir y detectar en al menos un detector de luz (D) , de manera alternada, correspondientes porciones de luz (Br) , de dicho haz de luz (Be) , reflejadas en cada una de dichas diferentes sub-áreas (Si) de la superficie a escanear (S) ;
estando el método caracterizado porque comprende, de manera previa a dicha recepción y detección: 25
- recibir, cada una de las porciones de luz reflejada (Br) , en una respectiva sub-cuadrícula (SQr) de una cuadrícula (Qr) en la que se encuentran dispuestos una pluralidad de elementos de redirección de luz (GM) , en un número mayor que el número de dichos detectores de luz (D) , que es al menos uno; y - redirigir, de manera secuencial, cada una de las porciones de luz reflejada (Br) 30 recibida en cada una de dichas sub-cuadrículas (SQr) hacia dicho detector de luz (D) , que es al menos uno.
17. Método según la reivindicación 16, caracterizado porque comprende redirigir, de manera secuencial, cada una de las porciones de luz reflejada (Br) recibida en cada una de las sub-cuadrículas (SQr) de elementos de redirección de luz (GM) 35 hacia una pluralidad de detectores de luz (D) , incluyendo a dicho detector de luz, dispuestos en cuadrícula (Qd) .
18. Método según la reivindicación 16 ó 17, caracterizado porque comprende llevar a cabo el escaneado de dicha superficie a escanear (S) utilizando el sistema según una cualquiera de las reivindicaciones 1 a 15. 40
19. Método según la reivindicación 18, caracterizado porque comprende determinar y variar el grado de la divergencia del haz de luz (Be) y/o variar el número de elementos de redirección de luz (GM) de cada sub-cuadrícula (SQr) , de manera automática y/o bajo indicación de un usuario y/o en función de una serie de señales de entrada locales y/o remotas y/o provenientes de detectores internos y/o externos, para aumentar la distancia de emisión, con el fin de detectar una superficie a mayor 5 distancia, y/o la velocidad de escaneado, sacrificando resolución espacial, o para aumentar la resolución espacial, sacrificando potencia óptica recibida, con el fin de escanear con mayor precisión un objeto de interés.
20. Método según la reivindicación 19, caracterizado porque comprende llevar a cabo dicha variación del grado de la divergencia del haz de luz (Be) y/o del número de 10 elementos de redirección de luz (GM) de cada sub-cuadrícula (SQr) , sobre la marcha, en función de las circunstancias de funcionamiento y/o del entorno y/o de unas detecciones de objetos realizadas.
21. Método según la reivindicación 20, caracterizado porque comprende variar el número de elementos de redirección de luz (GM) de la sub-cuadrícula (SQr) o sub-15 cuadrículas (SQr) de elementos de redirección de luz (GM) donde se ha recibido la luz reflejada (Br) en un objeto detectado.
22. Método según una cualquiera de las reivindicaciones 16 a 21, caracterizado porque comprende utilizar algoritmos de detección y seguimiento de objetos para el control de la secuencia de escaneado y la determinación de las sub-áreas (Si) a 20 escanear (S) como zonas ocupadas o a ocupar por uno o más objetos de interés.
23. Método según la reivindicación 22, caracterizado porque dichos algoritmos de detección y seguimiento incluyen algoritmos de predicción de movimientos.
24. Método según la reivindicación 23, caracterizado porque comprende utilizar unas imágenes captadas por una cámara 2D para condicionar la ejecución de dichos 25 algoritmos de detección y seguimiento de objetos.
25. Programa de ordenador que incluye instrucciones de programa ejecutables en un ordenador para implementar al menos parte de las etapas del método según una cualquiera de las reivindicaciones 16 a 24, incluyendo el análisis de las señales de salida de los detectores de luz, y la variación, mediante la generación de unas 30 correspondientes señales de control, del grado de divergencia del haz de luz y del número de elementos de redirección de luz activos de cada sub-cuadrícula.
Patentes similares o relacionadas:
ESCÁNER ÓPTICO A COLOR AEROTRANSPORTADO, del 4 de Junio de 2020, de AEROLASER SYSTEM S.L: ESCÁNER ÓPTICO A COLOR AEROTRANSPORTADO de sistema Flash-LADAR con láser , ópticas divisor de haz hacia un primer detector , espejo primario […]
Procedimiento y dispositivo para estabilizar localmente un punto de radiación en un objeto diana distante, del 6 de Mayo de 2020, de MBDA Deutschland GmbH: Un procedimiento para estabilizar localmente un punto de radiación (S) en un objeto diana distante (Z), donde el punto de radiación (S) se forma […]
Procedimiento y dispositivo para estabilizar localmente un punto de radiación en un objeto diana distante, del 15 de Abril de 2020, de MBDA Deutschland GmbH: Un procedimiento para estabilizar localmente un punto de radiación (S) en un objeto diana distante (Z), donde el punto de radiación (S) se forma a partir de un haz láser […]
Proceso y sistema para calcular el coste de materiales utilizables y consumibles para pintar vehículos de motor a partir del análisis de deformaciones en vehículos de motor, del 11 de Marzo de 2020, de Uesse S.R.L: Proceso para calcular el coste de materiales utilizables y consumibles para pintar vehículos de motor, a partir de un análisis de deformaciones en los vehículos […]
Métodos para realizar tareas en un tanque que contiene sustancias peligrosas, del 5 de Febrero de 2020, de Tankbots, Inc: Un método para realizar una tarea seleccionada en un tanque al menos parcialmente lleno de una sustancia energética ; caracterizado el método por: - dimensionar […]
Un sistema de cámara aérea, del 8 de Enero de 2020, de Spookfish Innovations Pty Ltd: Un sistema de cámara aérea que comprende: al menos una cámara dispuesta para capturar una pluralidad de imágenes sucesivas, incluyendo […]
Procedimiento de adquisición de imágenes de una escena, desde un sensor a bordo de un portador en desplazamiento, con servocontrol de su línea de visión, del 25 de Diciembre de 2019, de THALES: Procedimiento de adquisición de imágenes de una escena terrestre predeterminada, desde un portador en desplazamiento según una trayectoria […]
 Cámara, del 27 de Noviembre de 2019, de Nctech Ltd: Cámara panorámica que presenta un campo de visión global de 360° y configurada para capturar una imagen de 360° de una escena que se extiende alrededor […]
Cámara, del 27 de Noviembre de 2019, de Nctech Ltd: Cámara panorámica que presenta un campo de visión global de 360° y configurada para capturar una imagen de 360° de una escena que se extiende alrededor […]