Sistema de radar de alta precisión.
Sistema de radar de alta precisión, que comprende:
- módulo canal de microondas (4),
- módulo transmisor (3) que genera señales de impulso de ondas en la banda milimétrica y señales de impulso de sincronización,
- módulo receptor (5) que recibe y procesa las señales reflejadas del blanco,
- módulo de administración y alimentación (6) con módulo de sincronización y control (28) para transmitir órdenes de control a los módulos transmisor (3) y receptor (5),
- puesto computarizado de radiolocalización (7) con módulo procesador de radar (32),
- módulo de antena (1);
- bloque motor (2) para la rotación del módulo de antena (1), con:
módulo sensor de situación de la antena (34) que transmite la información sobre la situación angular del módulo de antena (1) al módulo de sincronización y control (28),
unión giratoria (33) para realizar una conexión sin contacto del módulo de antena (1) con los módulos transmisor (3) y receptor (5).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201331577.
Solicitante: UNIVERSIDAD DE CORDOBA.
Nacionalidad solicitante: España.
Inventor/es: GARCIA SALCINES,ENRIQUE, LOPEZ CORONADO,MIGUEL, DE CASTRO LOZANO, CARLOS, RAMÍREZ UCEDA,José Miguel, ROBLES GONZÁLEZ,Remedios María, MALGINA,Natalia, ASENJO DE ABAJO,Beatriz.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S13/10 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › que utilizan la transmisión de ondas discontinuas moduladas por pulsos (determinación de la distancia mediante mediciones de fase G01S 13/32).
- G01S7/03 G01S […] › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › Detalles de subsistemas de HF especialmente adaptados a ellos, p. ej. comunes a transmisor y a receptor.
- H01Q3/04 ELECTRICIDAD. › H01 ELEMENTOS ELECTRICOS BASICOS. › H01Q ANTENAS, es decir, ANTENAS DE RADIO (elementos radiantes o antenas para el calentamiento por microondas H05B 6/72). › H01Q 3/00 Dispositivos para cambiar o hacer variar la orientación o la forma del diagrama direccional de las ondas radiadas por una antena o por un sistema de antenas. › para hacer variar una coordenada de la orientación.
Fragmento de la descripción:
SISTEMA DE RADAR DE ALTA PRECISIÓN
Campo de la invención
La presente invención se engloba dentro del campo de los sistemas de radar. Antecedentes de la invención
En la actualidad son conocidos los sistemas de radar costeros de la banda de mm, que incluyen un dispositivo transmisor con un bloque de antena, un receptor de la señal, reflejada del blanco monitorizado, y un procesador digital para procesamiento (documentos de patente US5315303-A, GB2235841-A)
Sin embargo, estos sistemas de radar poseen una serie de imperfecciones en la unión de las señales de video y de sincronización las cuales se separan de nuevo en el bloque de conexión y comunicación. Este proceso causa detenciones y alteraciones de las señales de video y sincronización, lo cual empeora la capacidad resolutiva del sistema en distancia y complica su uso como sistema de alta precisión.
El objetivo de la presente invención es la mejora de las características de funcionamiento del sistema de radar.
Descripción de la invención
La presente invención consiste en un sistema de radar de alta precisión que comprende:
- un módulo canal de microondas,
- un módulo transmisor, encargado de generar las señales de impulso de ondas en la banda milimétrica y las señales de impulso de sincronización cuyo frente trasero coincide con el frente delantero de las señales reflejadas del blanco,
- un módulo receptor, encargado de recibir y procesar las señales reflejadas del
blanco,
- un módulo de administración y alimentación con un módulo de sincronización y control encargado de la transmisión de las órdenes de administración y control al módulo transmisor y al módulo receptor,
- un puesto computarizado de radiolocalización con un módulo procesador de
radar,
- un módulo de antena;
- un bloque motor encargado de efectuar la rotación del módulo de antena, dicho bloque motor disponiendo de:
un módulo sensor de situación de la antena encargado de transmitir la información sobre la situación angular del módulo de antena al módulo de sincronización y control, y
una unión giratoria configurada para realizar una conexión sin contacto del módulo de antena con los módulos transmisor y receptor.
En una realización preferente la unión giratoria comprende:
- dos secciones, una de las cuales está colocada constructivamente en el módulo de antena y la otra adjunta a los módulos transmisor y receptor;
- bloque de rotación,
- bridas con guía de ondas rectangular, y
- bridas con guía de ondas circular;
Las secciones de placas disponen de polarización para producir en las guías de ondas circulares una onda de polarización circular.
El módulo receptor comprende preferiblemente un amplificador de vídeo encargado de proporcionar las señales de vídeo al módulo procesador de radar y el módulo de administración y alimentación comprende un bloque de conmutación y conexión encargado de proporcionar las señales de sincronización proveniente del módulo transmisor al módulo procesador de radas; donde la entrega de las señales de vídeo y de sincronización es realizada directamente, y por separado, a las entradas de vídeo y de sincronización correspondientes del módulo procesador de radar.
El módulo de antena está preferentemente configurado para la creación de un campo visual panorámico con un ancho de radiación de la antena estrecho en el plano horizontal, entre 0,2° y 0,4°, y con tamaños permisibles de apertura de antena entre 1,5 m y 2,5 m. Se logra por la banda de frecuencias elegida.
El módulo transmisor está preferiblemente configurado para generar las señales de impulso de ondas en la banda milimétrica con una duración entre 0,035 ps y 2,0 ps.
La invención propuesta permite el aumento de la resolución del sistema en distancia y el aumento de la precisión de medición de distancias. También consigue una disminución de la cantidad de bloques que componen el sistema radar, con la consiguiente reducción de los costes de fabricación.
Breve descripción de los dibujos
A continuación se pasa a describir de manera muy breve una serie de dibujos que ayudan a comprender mejor la invención y que se relacionan expresamente con una realización de dicha invención que se presenta como un ejemplo no limitativo de ésta.
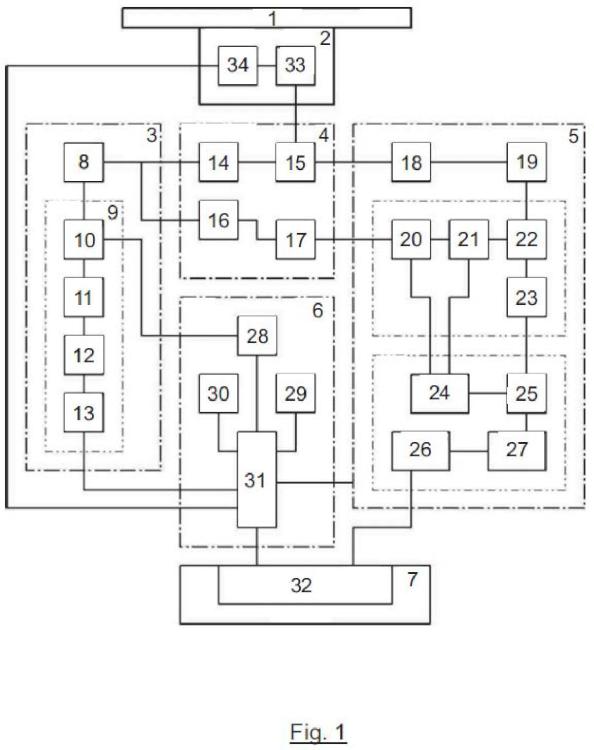
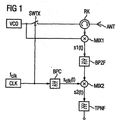
La Figura 1 representa un diagrama de bloques con los elementos del sistema de radar propuesto.
La Figura 2 representa la unión giratoria del módulo de antena.
Descripción detallada de la invención
El sistema de radar que se presenta está formado por un bloque o módulo de antena 1, conectado mediante una unión giratoria sin contacto con los siguientes bloques:
1) bloque o módulo canal de microondas 4,
2) bloque o módulo transmisor 3,
3) bloque o módulo receptor 5,
4) bloque o módulo de administración y alimentación 6,
5) puesto computarizado de radiolocalización 7, que incluye la placa de procesamiento de la señal del radar (módulo procesador de radar 32).
El sistema utiliza una antena 1 de tipo ranurado y con bocina. En la salida de la bocina se coloca un rotador de polarización. El bloque motor 2 se utiliza para la rotación de la antena 1 en el plano horizontal y está formado por la unión giratoria 33 y el módulo sensor de situación de la antena 34, el cual transmite la información sobre la situación angular de la antena al módulo de sincronización y control 28 en el bloque de administración y alimentación 6. El módulo transmisor 3 genera por una parte las señales de impulso de ondas en la banda milimétrica cuya duración varía entre 0,035-2,0 ps, y por otra parte, las señales de impulso de sincronización cuyo frente trasero coincide con el frente delantero de las señales reflejadas del blanco. Estas señales reflejadas del blanco, son recibidas y procesadas por el módulo receptor 5 que
contiene un amplificador de entrada de bajo ruido y un canal adicional de autoajuste de frecuencia con un mezclador separado. El módulo de sincronización y control 28 está conectado además, con los módulos de transmisión 3, recepción 5 y
procesamiento (7,32) mediante el módulo de conmutación y conexión 31.
El módulo de sincronización y control 28 asegura la transmisión de la órdenes de administración y control al módulo transmisor 3 y al módulo receptor 5 y está equipado con un canal de comunicación con el puesto computarizado de
radiolocalización 7, que contiene un computador con una placa de procesador de radar 32 y un monitor. La novedad de este sistema respecto a los anteriores, es que la señal de video proveniente del amplificador de video 26 y la señal de sincronización proveniente del bloque de conmutación y conexión 31, se entregan por separado a las entradas de video y sincronización correspondientes del procesador de radar 32.
El sistema de radar propuesto funciona de la manera siguiente:
Después del suministro de alimentación, el magnetrón 8, está preparado para trasmitir la señal de microondas. Para ello, desde la salida del módulo de sincronización y control 28, el pulso del arranque llega a la entrada del módulo de formación y control 13, destinado para la formación de pulsos de duración y frecuencias, y además, para la formación de las señales de fallo del transmisor 3. El
módulo de correción de la potencia 11 hace que el consumo de potencia por el
transmisor sea más estable y equilibrado. El módulo de transformación de la potencia 12, crea una tensión de 800 V para la operación del módulo de modulación 10. Por tanto, el bloque de sincronización y control 28 da la orden de arranque al bloque de modulación 9, que se encarga de la formación de un impulso de duración t y tensión Umod. Esta tensión de modulación Umod se suministra al magnetrón 8 que genera un radioimpulso de microondas de una duración determinada, el cual pasa primero a través de la válvula 14 del canal de microondas 4, cuya función es proteger el magnetrón 8 de las respuestas de la onda reflejada, y posteriormente entra al circulador 15, que lo pasa a su vez a la unión giratoria 33 del módulo de antena 1 que ya emite las ondas al espacio. La unión giratoria 33, mostrada en la Figura 2, se representa por dos secciones 35 separadas, una de las cuales se coloca constructivamente en la antena 1 y otra en el contenedor desmontable del módulo transceptor. Estas secciones son guías de ondas circulares para transformar suavemente las guías de ondas de sección rectangular conteniendo unas placas de
polarización que producen en las guías de ondas circulares...
Reivindicaciones:
1- Sistema de radar de alta precisión, que comprende:
- un módulo canal de microondas (4),
- un módulo transmisor (3), encargado de generar las señales de Impulso de ondas en la banda milimétrica y las señales de impulso de sincronización cuyo frente trasero coincide con el frente delantero de las señales reflejadas del blanco,
- un módulo receptor (5), encargado de recibir y procesar las señales reflejadas del blanco,
- un módulo de administración y alimentación (6) con un módulo de sincronización y control (28) encargado de la transmisión de las órdenes de administración y control al módulo transmisor (3) y al módulo receptor (5),
- un puesto computarizado de radiolocalización (7) con un módulo procesador de radar (32),
- un módulo de antena (1);
- un bloque motor (2) encargado de efectuar la rotación del módulo de antena (1), dicho bloque motor (2) disponiendo de:
un módulo sensor de situación de la antena (34) encargado de transmitir la información sobre la situación angular del módulo de antena (1) al módulo de sincronización y control (28), y
una unión giratoria (33) configurada para realizar una conexión sin contacto del módulo de antena (1) con los módulos transmisor (3) y receptor (5); caracterizado por que la unión giratoria comprende:
- dos secciones (35), una de las cuales está colocada constructivamente en el módulo de antena (1) y la otra adjunta a los módulos transmisor (3) y receptor (5);
- bloque de rotación (36),
- bridas con guía de ondas rectangular (37), y
- bridas con guía de ondas circular (38);
disponiendo las secciones (35) de placas de polarización para producir en las guías de ondas circulares una onda de polarización circular.
2- Sistema según la reivindicación 1, caracterizado por que el módulo de antena (1) está configurado para la creación de un campo visual panorámico con un ancho de radiación de la antena estrecho en el plano horizontal, entre 0,2°y 0,4° y con tamaños permisibles de apertura de antena entre 1,5 m y 2,5 m.
3- Sistema según cualquiera de las reivindicaciones anteriores, caracterizado por que el módulo transmisor (3) está configurado para generar las señales de impulso de ondas en la banda milimétrica con una duración entre 0,035 ps y 2,0 ps.
4- Sistema de radar de alta precisión, que comprende:
- un módulo canal de microondas (4),
- un módulo transmisor (3), encargado de generar las señales de impulso de ondas en la banda milimétrica y las señales de impulso de sincronización cuyo frente trasero coincide con el frente delantero de las señales reflejadas del blanco,
- un módulo receptor (5), encargado de recibir y procesar las señales reflejadas del blanco,
- un módulo de administración y alimentación (6) con un módulo de sincronización y control (28) encargado de la transmisión de las órdenes de administración y control al módulo transmisor (3) y al módulo receptor (5),
- un puesto computarizado de radiolocalización (7) con un módulo procesador de radar (32),
- un módulo de antena (1);
- un bloque motor (2) encargado de efectuar la rotación del módulo de antena (1), dicho bloque motor (2) disponiendo de:
un módulo sensor de situación de la antena (34) encargado de transmitir
la información sobre la situación angular del módulo de antena (1) al módulo de
sincronización y control (28), y
una unión giratoria (33) configurada para realizar una conexión sin
contacto del módulo de antena (1) con los módulos transmisor (3) y receptor
(5);
caracterizado por que el módulo receptor (5) comprende un amplificador de vídeo (26) encargado de proporcionar las señales de vídeo al módulo procesador de radar (32) y el módulo de administración y alimentación (6) comprende un bloque de conmutación y conexión (31) encargado de proporcionar las señales de sincronización proveniente del módulo transmisor (3) al módulo procesador de radas (32); donde la entrega de las señales de vídeo y de sincronización es realizada directamente, y por separado, a las entradas de vídeo y de sincronización correspondientes del módulo procesador de radar (32).
5- Sistema según la reivindicación 4, caracterizado por que el módulo de antena (1) está configurado para la creación de un campo visual panorámico con un ancho de radiación de la antena estrecho en el plano horizontal, entre 0,2°y 0,4° y con tamaños permisibles de apertura de antena entre 1,5 m y 2,5 m.
6- Sistema según cualquiera de las reivindicaciones 4 a 5, caracterizado por que el módulo transmisor (3) está configurado para generar las señales de impulso de ondas en la banda milimétrica con una duración entre 0,035 ps y 2,0 ps.
Patentes similares o relacionadas:
 MÉTODO Y APARATO PARA LA DETECCIÓN DE DISTANCIA, VELOCIDAD Y DIRECCIÓN DE OBJETOS, del 1 de Septiembre de 2015, de DIAZ FUENTE,VICENTE: La invención a la que se refiere la presente memoria trata de un método y aparato para la detección de distancia, velocidad y dirección de objetos mediante la emisión de ondas […]
MÉTODO Y APARATO PARA LA DETECCIÓN DE DISTANCIA, VELOCIDAD Y DIRECCIÓN DE OBJETOS, del 1 de Septiembre de 2015, de DIAZ FUENTE,VICENTE: La invención a la que se refiere la presente memoria trata de un método y aparato para la detección de distancia, velocidad y dirección de objetos mediante la emisión de ondas […]
 MÉTODO Y APARATO PARA LA DETECCIÓN DE DISTANCIA, VELOCIDAD Y DIRECCIÓN DE OBJETOS, del 6 de Agosto de 2015, de DIAZ FUENTE,VICENTE: La invención a la que se refiere la presente memoria trata de un método y aparato para la detección de distancia, velocidad y dirección de objetos mediante […]
MÉTODO Y APARATO PARA LA DETECCIÓN DE DISTANCIA, VELOCIDAD Y DIRECCIÓN DE OBJETOS, del 6 de Agosto de 2015, de DIAZ FUENTE,VICENTE: La invención a la que se refiere la presente memoria trata de un método y aparato para la detección de distancia, velocidad y dirección de objetos mediante […]
 SISTEMA DE RADAR DE ALTA PRECISIÓN, del 7 de Mayo de 2015, de UNIVERSIDAD DE CORDOBA: Sistema de radar de alta precisión, que comprende: ¿ módulo canal de microondas , ¿ módulo transmisor que genera señales de impulso de ondas […]
SISTEMA DE RADAR DE ALTA PRECISIÓN, del 7 de Mayo de 2015, de UNIVERSIDAD DE CORDOBA: Sistema de radar de alta precisión, que comprende: ¿ módulo canal de microondas , ¿ módulo transmisor que genera señales de impulso de ondas […]
CONCEPTO DE EVALUACION PARA UN PROCEDIMIENTO DE TELEMETRIA., del 16 de Mayo de 2006, de ITT MANUFACTURING ENTERPRISES, INC.: SE DESCRIBE UN PROCEDIMIENTO PARA LA DETERMINACION DE UNA DISTANCIA D ENTRE UN SENSOR DE DISTANCIA Y UN OBJETO. EL EMISOR EMITE IMPULSOS DE ONDAS […]
PROCEDIMIENTO DE RADAR DE IMPULSOS., del 1 de Agosto de 2001, de DAIMLERCHRYSLER AG: SE DESCRIBE UN PROCEDIMIENTO RADAR DE IMPULSOS, DONDE SE REALIZA EN UN PRIMER MODO UNA COBERTURA DE BLANCO CON UNA PRIMERA SOLUCION DE ALOJAMIENTO Y […]
MODO DE OPERACION DE UN RADAR DE IMPULSOS., del 1 de Febrero de 2001, de DAIMLERCHRYSLER AG: SE PROPONE UN PROCEDIMIENTO RADAR DE IMPULSO CON EXPLORACION DE LAS SEÑALES DE RECEPCION Y CONVERSION ANALOGICA/DIGITAL DE LOS VALORES DE EXPLORACION, QUE […]
APARATO DE RADAR., del 1 de Octubre de 1996, de HOLLANDSE SIGNAALAPPARATEN B.V.: APARATO DE RADAR PROVISTO CON UN GENERADOR DE SEÑAL , ELEMENTO TRANSMISOR , ELEMENTO ANTENA , ELEMENTO RECEPTOR , UN PROCESADOR DE VIDEO Y UN DISPOSITIVO […]
 RADAR CON UN OSCILADOR EMISOR QUE PUEDE EXCITARSE CASI EN COHERENCIA DE FASE (QUASI-PHASE) MEDIANTE UN OSCILADOR DE EVALUACION, del 16 de Noviembre de 2007, de SIEMENS AKTIENGESELLSCHAFT: Sistema con elementos emisores para enviar una señal y con elementos receptores para recibir una reflexión de la señal enviada, presentando los elementos emisores un oscilador […]
RADAR CON UN OSCILADOR EMISOR QUE PUEDE EXCITARSE CASI EN COHERENCIA DE FASE (QUASI-PHASE) MEDIANTE UN OSCILADOR DE EVALUACION, del 16 de Noviembre de 2007, de SIEMENS AKTIENGESELLSCHAFT: Sistema con elementos emisores para enviar una señal y con elementos receptores para recibir una reflexión de la señal enviada, presentando los elementos emisores un oscilador […]