SISTEMA DE CONTROL Y SOPORTE EN EJECUCION DE OBRAS MEDIANTE ESCANEADOLASER.
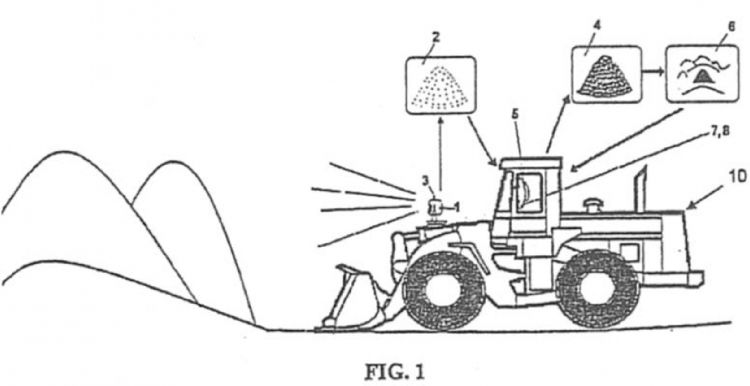
La invención se refiere a un sistema de control y soporte en ejecución de obras que comprende un escáner láser (1),
una cámara (3), un GPS (7) y un sistema inercial (8), todos ellos integrados y embarcados en la máquina de obra. Además se dispone de un sistema de visualización (5) y procesado online (18) de los datos obtenidos. Mediante el escáner láser y la cámara se capturan datos tridimensionales y colorimétricos de una región de terreno; simultáneamente se obtienen datos de posicionamiento y orientación de la máquina, y por tanto de escáner y cámara en el instante de escaneo. Con estas mediciones se referencian los datos tridimensionales y colorimétricos obtenidos a un sistema de referencia global, y se integran los datos de distintos escaneos en un único modelo tridimensional. La unidad de procesado permite construir modelos de superficies texturizados a partir de los datos anteriores y realizar un ajuste fino. El sistema incluye medios de visualización, para la visualización conjunta del modelo incremental de terreno junto con otros modelos 3D de referencia, tal que en todo momento se tiene información precisa del progreso de la obra
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200800197.
Solicitante: FUNDACION CARTIF.
Nacionalidad solicitante: España.
Provincia: VALLADOLID.
Inventor/es: PERAN GONZALEZ,JOSE RAMON, DOMINGUEZ QUIJADA,SALVADOR, GOMEZ GARCIA-BERMEJO,JAIME, MARCOS PABLOS,SAMUEL, LLAMAS FERNANDEZ,JOSE, ZAMALA CASANOVA,EDUARDO.
Fecha de Solicitud: 25 de Enero de 2008.
Fecha de Publicación: .
Fecha de Concesión: 29 de Marzo de 2011.
Clasificación Internacional de Patentes:
- G06T17/50
Clasificación PCT:
- G06T17/50
Fragmento de la descripción:
Sistema de control y soporte en ejecución de obras mediante escaneado láser.
Campo de la invención
La presente invención se enmarca dentro del campo de la construcción, concretamente en la ayuda al usuario de maquinaria pesada en su correcto guiado y operación a través de cualquier tipo de terreno. El abanico de aplicaciones es amplio e incluye cualquier tipo de proyecto de construcción o movimiento de tierras: carreteras, edificaciones, campos de golf, trabajos en canteras, etc.
Antecedentes de la invención
Los actuales sistemas destinados al guiado de maquinaria de construcción presentan limitaciones en cuanto a la autonomía e independencia del propio sistema de guiado. Por regla general, las propuestas de sistemas de guiado están basados en un conjunto de elementos externos (estaciones totales, sistemas de comunicación, sistemas geo-referenciación etc.) o internos (sistemas de posicionamiento global GPS) que suministran las órdenes de guiado por medio de un dispositivo de visualización. Sin embargo estos sistemas no disponen de sistemas de realimentación al operario que permitan a éste verificar el estado del entorno ni realizar un seguimiento de la evolución de tareas a realizar en la obra.
Otras propuestas se construyen como un conjunto de elementos destinados al posicionamiento de la maquinaria y los datos adquiridos del entorno, y a la propia captura de datos (en caso de incluir ésta característica). El único componente del sistema que se integra en la propia maquinaria es la componente de visualización, a la que puede acompañar un pequeño software de procesado de datos.
Existe, por tanto, la necesidad de mejorar los sistemas de guiado y ayuda al operario de maquinaria de construcción, de forma que se posibilite una visión global del estado de la obra y la evolución de la misma tanto analítica como cualitativamente, es decir, incluyendo datos numéricos específicos del progreso de la construcción, excavado, movimiento de terreno, etc. y proporcionando un modelo digital del terreno realista, preferiblemente texturizado, y en tiempo real, que ayude al operario en su percepción del progreso de la obra.
Además se observa la necesidad de un sistema autónomo e independiente de la maquinaria empleada o de las características del terreno para su correcto funcionamiento, de forma que pueda ser empleado sin ningún tipo de planificación o ajuste previo.
La aparición de escáneres modernos de largo alcance (tales como LaserAce, Mensi, Leica, Riegl, Faro, Optech) permite caracterizar el terreno mediante la generación de modelos tridimensionales del entorno.
En el documento de patente estadounidense US 2005/0283294 se describe un método (y un aparato) de guiado para maquinaria pesada o de movimiento de tierras, basado en escáneres de este tipo. Una serie de escáneres láser 3D se disponen por todo el terreno. Las imágenes 3D obtenidas por los escáneres se transmiten a una unidad de procesamiento remota, para determinar la geometría del terreno e inferir también la posición de la maquinaria.
Sin embargo, tanto el método descrito en este documento de patente US como otras aproximaciones al guiado de maquinaria por medio de modelos digitales del terreno de trabajo, presentan el inconveniente de que debe realizarse una planificación previa para el correcto posicionamiento de las distintas (múltiples) unidades de escaneo. Además, habrá superficies dentro del terreno que no pueden ser escaneadas con estos escáneres fijos, ya que existirán regiones de sombras provocadas por la propia topografía del terreno y por la propia maquinaria. En particular esto último implica que pudiera ser necesario detener la maquinaria presente en la obra, o incluso retirarla, si se desea obtener información tridimensional precisa de las modificaciones que se realizan en la superficie de trabajo.
Otra importante limitación de los sistemas actuales es la falta de realismo de los datos generados. De cara al usuario, es importante conocer no sólo los dichos datos geométricos, sino que además es recomendable que el modelo 3D generado a partir de dichos datos sea lo más realista posible, de forma que resulte intuitivo y facilite su utilización. Sin embargo, las soluciones existentes no contemplan la incorporación de información colorimétrica a los modelos tridimensionales.
Algunos de los recientes escáneres de largo alcance son capaces de proporcionar la intensidad del haz láser reflejado (LaserAce, Mensi), pero esto es sólo es una burda aproximación al color real (monocromática, y directamente determinada por la el ángulo de incidencia del láser en el terreno, no sólo por la reflectancia). Otros modelos más avanzados (Leica, Riegl, Faro, Optech) proveen el color de cada punto 3D medido, mediante un dispositivo captador de imágenes adicional. Sin embargo, este color tiene una resolución muy inferior a la deseable para obtener un alto realismo (dado que se limita a la resolución de la medición geométrica, a su vez restringida severamente por el tiempo que se requiere para la medición completa de la escena). Además la limitación de resolución restringe la utilización de la información colorimétrica como medio para corregir la posición.
Descripción de la invención
La invención se refiere a un sistema de adquisición, tratamiento y visualización de datos relativos a un trabajo realizado por una máquina en un terreno de acuerdo con la reivindicación 1. Realizaciones preferidas del sistema se describen en las reivindicaciones dependientes.
Las deficiencias mencionadas anteriormente se superan con el sistema de la invención, que permite al escaneado del terreno mediante un sistema embarcado en la propia máquina.
Según un primer aspecto de la invención, ésta se refiere a un sistema de adquisición, tratamiento y visualización de datos relativos a un trabajo realizado por una máquina en un terreno que comprende:
estando escáner, dispositivo de posicionamiento GPS y unidad de medición inercial todos embarcados en la máquina, y comprendiendo
y donde el sistema además comprende:
El sistema de la invención preferiblemente comprende además medios de captura de imagen para capturar datos colorimétricos de dicha región en el instante de escaneo; y la unidad de procesado está configurada para combinar dichos datos tridimensionales reconstruidos y dichos datos colorimétricos, y mediante los datos de posicionamiento y orientación de la máquina referenciar dichos datos tridimensionales reconstruidos y colorimétricos...
Reivindicaciones:
1. Sistema de adquisición, tratamiento y visualización de datos relativos a un trabajo realizado por una máquina (10) en un terreno que comprende:
estando unidad de escaneado (1), dispositivo de posicionamiento GPS (7) y unidad de medición inercial (8) todos embarcados en la máquina (10), y comprendiendo
en donde el sistema además comprende:
2. Sistema según la reivindicación 1, que además comprende:
3. Sistema según cualquiera de las reivindicaciones anteriores, en el que la unidad de escaneado (1) es un escáner láser.
4. Sistema según cualquiera de las reivindicaciones anteriores, en el que la unidad de medición inercial está configurada para recoger datos de tres fuentes de información están compuestas por tres acelerómetros 3D, tres giróscopos 3D y un magnetómetro 3D.
5. Sistema según cualquiera de las reivindicaciones 2-4, en el que los dichos datos colorimétricos son empleados en el alineamiento de diferentes escaneos.
6. Sistema según cualquiera de las reivindicaciones anteriores, en el que dichas primitivas geométricas son triángulos.
Patentes similares o relacionadas:
 Sistema y método para realizar la vigilancia perimetral optimizada, del 23 de Octubre de 2013, de THE BOEING COMPANY: Un método implementado por ordenador para la formación de un cable trampa virtual a través de unasubregión de un área de interés , comprendiendo el método:
realizar […]
Sistema y método para realizar la vigilancia perimetral optimizada, del 23 de Octubre de 2013, de THE BOEING COMPANY: Un método implementado por ordenador para la formación de un cable trampa virtual a través de unasubregión de un área de interés , comprendiendo el método:
realizar […]
 PROCEDIMIENTO DE RECONSTRUCCIÓN DE IMAGEN EN UN GRAFICO VECTORIAL, del 24 de Mayo de 2011, de NEWSCAPE TECHNOLOGY: Procedimiento de tratamiento de datos de imágenes digitales en forma de gráfico vectorial, comprendiendo las imágenes zonas delimitadas por líneas poligonales, […]
PROCEDIMIENTO DE RECONSTRUCCIÓN DE IMAGEN EN UN GRAFICO VECTORIAL, del 24 de Mayo de 2011, de NEWSCAPE TECHNOLOGY: Procedimiento de tratamiento de datos de imágenes digitales en forma de gráfico vectorial, comprendiendo las imágenes zonas delimitadas por líneas poligonales, […]
 METODO Y DISPOSITIVO DE PROCESAMIENTO DE DATOS, del 24 de Agosto de 2010, de TOMTOM INTERNATIONAL B.V.: Un método de procesamiento de datos de píxeles de un campo de vista , en el que el campo de vista comprende una parte de un mapa digital […]
METODO Y DISPOSITIVO DE PROCESAMIENTO DE DATOS, del 24 de Agosto de 2010, de TOMTOM INTERNATIONAL B.V.: Un método de procesamiento de datos de píxeles de un campo de vista , en el que el campo de vista comprende una parte de un mapa digital […]
 PROCEDIMIENTO PARA EL ESTUDIO Y RESOLUCION DE PROBLEMAS MEDIOAMBIENTALES, del 18 de Febrero de 2010, de ABELLA GAVELA, GERARDO: Se describe un procedimiento mediante el que resulta posible el estudio y de problemas medioambientales, tales como la contaminación o la producción de ruidos, por analogía […]
PROCEDIMIENTO PARA EL ESTUDIO Y RESOLUCION DE PROBLEMAS MEDIOAMBIENTALES, del 18 de Febrero de 2010, de ABELLA GAVELA, GERARDO: Se describe un procedimiento mediante el que resulta posible el estudio y de problemas medioambientales, tales como la contaminación o la producción de ruidos, por analogía […]
PROCEDIMIENTO DE PRESENTACION VISUAL DE INFORMACIONES CARTOGRAFICAS EN UNA PANTALLA DE AERONAVE., del 16 de Noviembre de 2005, de THALES: Procedimiento de presentación visual, en una pantalla de aeronave, de varias ventanas (2D5, 3D, PV, PH) que representan cada una un aspecto distinto del terreno […]
PROCEDIMIENTO PARA LA OBTENCION DE UN MODELO TRIDIMENSIONAL DEL TERRENO., del 16 de Diciembre de 2003, de SANCHEZ HERRANZ,JORDI: Procedimiento para la obtención de un modelo tridimensional del terreno. Consiste en: a) Seleccionar los datos necesarios de una base […]
UN METODO PARA PRESENTAR AUTOMATICAMENTE SIMBOLOS DE MAPAS., del 16 de Noviembre de 2002, de RAYTHEON COMPANY: UN METODO PARA VISUALIZAR AUTOMATICAMENTE UNA SIMBOLOGIA DE MAPAS DE UN SISTEMA DE INFORMACION GEOGRAFICA. EN EL METODO, EL ORDENADOR RECUPERA […]
 PROCESO DE PRESENTACION DE INFORMACIONES CARTOGRAFICAS Y DE ZONAS AERONAUTICAS SOBRE LA PANTALLA DE UNA AERONAVE, del 1 de Septiembre de 2008, de THALES: Proceso de síntesis, sobre una pantalla de aeronave, de al menos una primera ventana que representa una imagen cartográfica en vista […]
PROCESO DE PRESENTACION DE INFORMACIONES CARTOGRAFICAS Y DE ZONAS AERONAUTICAS SOBRE LA PANTALLA DE UNA AERONAVE, del 1 de Septiembre de 2008, de THALES: Proceso de síntesis, sobre una pantalla de aeronave, de al menos una primera ventana que representa una imagen cartográfica en vista […]