7 inventos, patentes y modelos de GOMEZ GARCIA-BERMEJO,JAIME
DISPOSITIVO PARA DETECCIÓN TEMPRANA DE DAÑOS EN UNA
GEOMEMBRANA Y PROCEDIMIENTO PARA DICHA DETECCIÓN.
Sección de la CIP Física
(13/09/2018). Solicitante/s: FUNDACION CARTIF. Clasificación: G06T7/00, G01N21/956, G01N21/898.
Dispositivo que permite detectar daños en una geomembrana de manera temprana, y procedimiento para llevar a cabo dicha detección. La geomembrana incluye configuraciones que siguen un patrón, el dispositivo comprende unos medios de almacenamiento de datos, un procesador de datos, unos medios de iluminación para iluminar las configuraciones y una cámara para registrarla reflexión de la luz en dichas configuraciones de la geomembrana. El procedimiento para la detección temprana de daños en una geomembrana y con un dispositivo como los descritos comprende las siguientes etapas:
a. introducción en los medios de almacenamiento de datos del patrón de las configuraciones;
b. iluminación de las configuraciones con los medios de iluminación;
c. registro de la reflexión de la luz en dichas configuraciones con la cámara;
d. comprobación de si la reflexión de la luz en las configuraciones sigue el patrón almacenado;
e. establecimiento de un daño.
PDF original: ES-2681504_A1.pdf
SISTEMA Y PROCEDIMIENTO PARA IDENTIFICACIÓN, SEGUIMIENTO Y GESTIÓN DE RIESGOS ESTRUCTURALES.
Sección de la CIP Física
(16/04/2018). Solicitante/s: FUNDACION CARTIF. Clasificación: G01S5/00, G01H9/00, G01M7/00, G01B9/00.
Sistema y procedimiento para identificación, seguimiento y gestión de riesgos estructurales en edificios e infraestructuras de manera que se pueda actuar con la suficiente antelación para evitar daños personales y materiales. El sistema comprende medios ópticos para la identificación de riesgos mediante la adquisición de imágenes dispuestos en vehículos aéreos o terrestres; nodos telemétricos para el seguimiento de los riesgos; módulo de gestión para la gestión de los riesgos en base a los datos proporcionados por los medios ópticos y los nodos telemétricos. En el procedimiento se identifican los riesgos mediante unos medios ópticos; se envían los datos de riesgos identificados a un módulo de gestión; se sigue la evolución de los riesgos identificados mediante unos nodos telemétricos; se envían los datos de seguimiento al módulo de gestión.
PDF original: ES-2663649_A1.pdf
Sistema de supervisión y ayuda de las operaciones manuales de ensamblado industrial mediante realidad aumentada y procedimiento de uso.
(17/12/2014) La invención es un sistema de supervisión y ayuda de las operaciones manuales de ensamblado industrial mediante realidad aumentada que comprende un bastidor , un panel base , sobre el que se realizan las operaciones de ensamblado, una unidad de control , al menos dos herramientas , una serie de sensores colocados en las herramientas , al menos un proyector que proyecta sobre el panel base información de las operaciones a realizar, y un sistema de comunicación , tal que mediante al menos un emisor-receptor de luz se localizan las citadas herramientas sobre el panel base y mediante unos sensores se realiza la medición de los parámetros de funcionamiento de estas herramientas , las mediciones hechas por los sensores se envían mediante…
SISTEMA DE CONTROL Y SOPORTE EN EJECUCION DE OBRAS MEDIANTE ESCANEADOLASER.
(08/04/2011) La invención se refiere a un sistema de control y soporte en ejecución de obras que comprende un escáner láser , una cámara , un GPS y un sistema inercial , todos ellos integrados y embarcados en la máquina de obra. Además se dispone de un sistema de visualización y procesado online de los datos obtenidos. Mediante el escáner láser y la cámara se capturan datos tridimensionales y colorimétricos de una región de terreno; simultáneamente se obtienen datos de posicionamiento y orientación de la máquina, y por tanto de escáner y cámara en el instante de escaneo. Con estas mediciones se referencian los datos tridimensionales y colorimétricos…
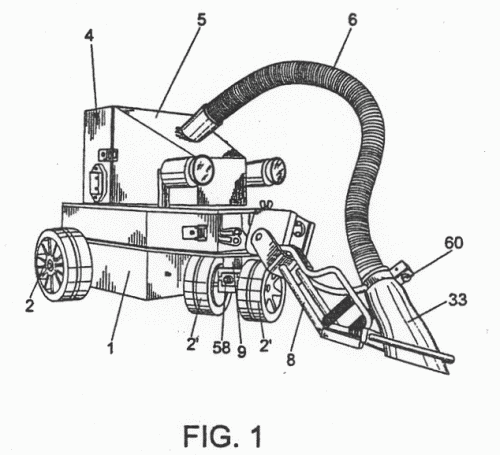
ROBOT TELEOPERADO PARA LIMPIEZA DE CONDUCTOS DE AIRE ACONDICIONADO.
Sección de la CIP Técnicas industriales diversas y transportes
(16/10/2006). Ver ilustración. Solicitante/s: CENTRO DE AUTOMATIZACION, ROBOTICA Y TECNOLOGIAS DE LA INFORMACION Y DE LA FABRICACION. Clasificación: B08B5/04, B08B9/02, B25J5/06.
Robot teleoperador para limpieza de conductos de aire acondicionado. Integrado en el chasis dispone de un módulo de aspiración que comprende un aspirador accionado por un motor contenido en una carcasa que conforma un depósito para acumulación de la suciedad aspirada a través de un conducto flexible . Consta de un brazo portaherramientas de dos grados de libertad que permite limpiar conductos de diferente geometría sin necesidad de cambiar la herramienta de limpieza, así como incorpora un sistema de tracción diferencial con propulsión independiente de unas ruedas traseras , y un eje delantero vertical en el que se montan unas ruedas directrices (2') accionado por un servomotor que determina el movimiento del eje vertical y la rotación de las ruedas directrices (2') en coordinación con el movimiento de las ruedas traseras sin deslizamiento, evitando así causar daños en las paredes de los conductos.
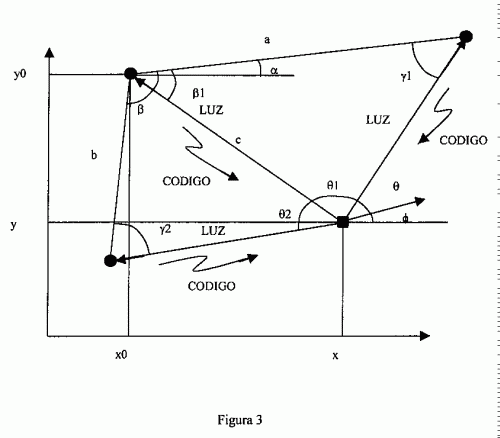
SISTEMA DE LOCALIZACION DE OBJETOS EN MOVIMIENTO.
Sección de la CIP Física
(01/01/2004). Ver ilustración. Solicitante/s: CENTRO DE AUTOMATIZACION ROBOTICA Y TECNOLOGIAS DE LA FABRICACION (CARTIF). Clasificación: G01S5/16.
Sistema de localización de objetos en movimiento. El sistema objeto de la presente invención permite la localización de objetos, robots, vehículos, personas, etc en movimiento. Para ello una fuente de luz direccional sobre el elemento a localizar excita una serie de balizas dispuestas en su entorno en posiciones conocidas. Para ello cada baliza va provista de un sensor óptico capaz de detectar la incidencia del haz luminoso. Al tiempo que una baliza recibe la incidencia del haz láser, ésta emite un código binario por radiofrecuencia que permite al sistema identificar inequívocamente la baliza activada. A continuación se mide el ángulo relativo de incidencia del haz láser sobre las balizas activadas. Mediante un proceso trigonométrico de triangulación, y a partir del ángulo relativo medido entre las balizas activadas, se determina la posición y orientación del objeto en cuestión.
SISTEMA AUTOMATICO PARA LA INGENIERIA INVERSA EN ENTORNOS CAD Y LA EVALUACION OBJETIVA DEL COLOR.
(01/02/2000) El sistema objeto de la presente invención permite (i) medir la información geométrica y cromática de piezas, (ii) construir una representación geométrica de las mismas adecuada para su introducción y manejo eficiente en entornos CAD (Computer Aided Design) y, en el caso de piezas homogéneas, (iii) cuantificar de forma objetiva su comportamiento cromático. El funcionamiento de la invención es enteramente automático: la misión del operador se reduce a ubicar las piezas en la plataforma de medida, a definir la secuencia de posiciones a estudiar y a lanzar los distintos procedimientos en el orden deseado (bien directamente o a través…
{kind=link}
{kind=link}