PROCEDIMIENTO Y DISPOSITIVO DE CLASIFICACION DE VEHICULOS.
Dispositivo de tratamiento de datos de firmas electromagnéticas de vehículos obtenidas a partir de señales electromagnéticas sobre una calzada que comprende unas vías de paso,
provistas cada una de ellas de un solo bucle electromagnético, que comprende:
- unos medios (16) para proporcionar una señal digitalizada a partir de las señales electromagnéticas,
- unos medios (20, 30, 36) para determinar si dicha señal digitalizada es una señal de firma electromagnética de un vehículo,
- unos medios (20, 36) para calcular, a partir de la señal digitalizada, datos de firma electromagnética de un vehículo y para secuenciar y fechar de manera sincronizada y en tiempo real cada dato de firma electromagnética, y
- unos medios (22, 54) de clasificación para clasificar, según un algoritmo de clasificación de formas que comprende una pluralidad de árboles de decisión, los vehículos en por lo menos dos categorías (C1, ... C14) de siluetas en función de las señales de firma electromagnética digitalizadas, secuenciadas y fechadas
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR01/02292.
Solicitante: LABORATOIRE CENTRAL DES PONTS ET CHAUSSEES
ALCATEL.
Nacionalidad solicitante: Francia.
Dirección: 58, BOULEVARD LEFEBVRE,75015 PARIS.
Inventor/es: BERTRAND, JEAN, DICKO,MAMADOU.
Fecha de Publicación: .
Fecha Concesión Europea: 26 de Mayo de 2010.
Clasificación Internacional de Patentes:
- G08G1/042 FISICA. › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › utilizando detectores inductivos o magnéticos.
Clasificación PCT:
- G08G1/042 G08G 1/00 […] › utilizando detectores inductivos o magnéticos.
Clasificación antigua:
- G08G1/042 G08G 1/00 […] › utilizando detectores inductivos o magnéticos.
Fragmento de la descripción:
Procedimiento y dispositivo de clasificación de vehículos.
Campo técnico y técnica anterior
La invención se refiere al campo de las técnicas que permiten recoger datos de carreteras y, en particular, contar y/o clasificar vehículos automóviles en el curso de su trayecto sobre una calzada, por ejemplo sobre una autopista.
La invención se refiere, en particular, a un procedimiento y a un dispositivo de clasificación de vehículos en categorías de silueta a partir de su firma electromagnética.
Se refiere asimismo al campo de la gestión del tráfico de carretera.
En la actualidad, los sensores de bucles electromagnéticos se utilizan para el análisis del tráfico de carretera. Tienen la ventaja de ser simples y robustos.
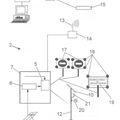
Como se ilustra en la figura 1, un punto de medición sobre una vía de circulación comprende por lo menos dos bucles 2, 4 electromagnéticos. Cada bucle está constituido por algunas espiras (generalmente 3 ó 4) de hilo conductor dispuestas en la calzada para formar una bobina, y se coloca en una roza a algunos centímetros de profundidad.
Cada bobina así formada presenta en general una inductancia del orden de 100 µH.
Cuando una bobina es excitada por una tensión alterna, a una frecuencia del orden de 30 a 150 kHz, se crea un campo magnético, que es proporcional a la inductancia de la bobina y a la corriente que la atraviesa.
Si una masa metálica penetra en el campo, unas corrientes inducidas modifican este último y provocan como consecuencia una variación de la autoinductancia de la bobina. La detección de este fenómeno de variación de inductancia está asegurada por un detector 6. Puede realizare mediante la medición de variación de fase o de variación de amplitud, o de variación de frecuencia o incluso mediante la medición de variación de impedancia.
Con los detectores conocidos, de uso habitual, en cuanto un vehículo está presente sobre el bucle, se dispone a la salida de una señal lógica correspondiente a la duración de la presencia del vehículo sobre el bucle. Esta señal lógica aparece en cuanto la variación relativa de autoinductancia (?L/L) sobrepasa el umbral de sensibilidad del detector.
De hecho, con un único sensor por vía de circulación se pueden contabilizar los vehículos y determinar una densidad de tráfico. Pero se puede medir también el tiempo durante el cual los vehículos están presentes (sobre el sensor) y expresar una tasa de ocupación, como se ilustra en la patente GB 1205036 y las solicitudes EP 089030 y WO95/28693.
Si se disponen dos sensores sobre una misma vía de circulación, pero separados en una cierta distancia (en general 3 m entre frentes de ataque), se obtiene entonces una información sobre la velocidad, así como una información sobre la longitud del vehículo. Por tanto, es posible disociar los vehículos largos de los vehículos cortos.
No obstante, esta clasificación, utilizada a veces en ciertas aplicaciones para hacer la discriminación en categorías de vehículos, sigue siendo muy aproximada y poco precisa. Es así, por ejemplo, que los coches que remolcan una caravana o simplemente un pequeño remolque son clasificados como vehículos pesados.
Además, únicamente se puede realizar una clasificación como máximo en 6 categorías de longitudes.
Cuando se desea una clasificación más fina, por ejemplo en 14 categorías de siluetas, se debe añadir a los dos bucles anteriores un tercer sensor cuyo papel es detectar los ejes al paso de los vehículos.
Este sensor suplementario está constituido generalmente por un cable piezoeléctrico.
En lugar del cable piezoeléctrico y para cumplir las mismas funciones, se utiliza también a veces un bucle particular denominado "bucle estrecho".
Este tipo de dispositivo proporciona unos resultados de clasificación que son en general satisfactorios para los explotadores de carreteras, pero tiene un coste que es elevado. En efecto, dicho lugar es aproximadamente equivalente, en términos de precio de coste, a 3 lugares equipados para evaluar las velocidades (incluyendo en este precio la ingeniería civil y los detectores).
Por consiguiente, para responder a las necesidades de recogida de datos sobre el tráfico con la tecnología de bucles, es necesario asociar varios sensores por vía, de lo cual resulta un sobrecoste de realización no despreciable por punto de medición para las instalaciones actuales.
Se han utilizado sistemas que utilizan sensores capacitivos, en particular en Inglaterra, pero siempre en asociación con un par de bucles electromagnéticos, lo cual no resuelve el problema del precio de coste.
Exposición de la invención
Por tanto, se plantea el problema de encontrar un dispositivo de tratamiento de datos a la vez más simple que los sistemas conocidos actualmente y que presente una gran fiabilidad.
Se plantea asimismo el problema de encontrar un dispositivo que permita obtener una gran precisión sobre las firmas electrónicas de los vehículos.
Se plantea asimismo el problema de encontrar un dispositivo que permita detectar con precisión la categoría de un vehículo y que sea de una realización y de un coste razonables.
La invención tiene por objeto un dispositivo de tratamiento de datos según la reivindicación 1 y un procedimiento de tratamiento de datos según la reivindicación 7.
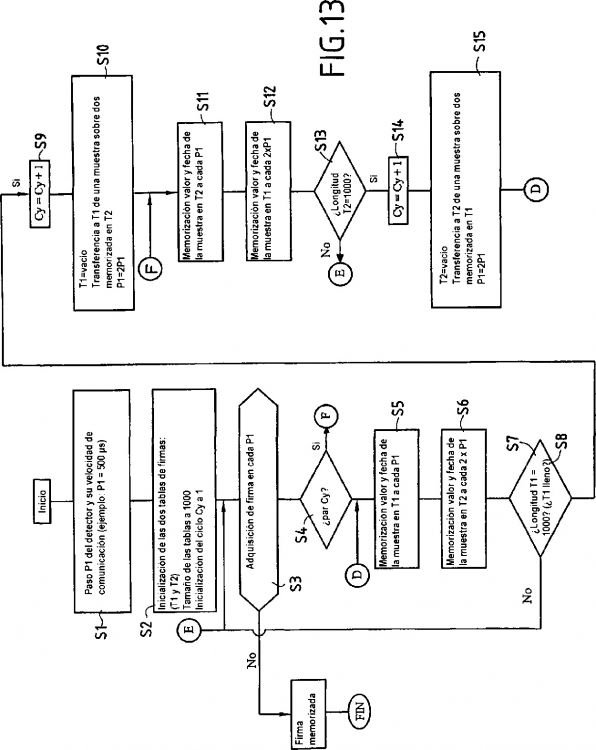
Por tanto, el dispositivo según la invención utiliza la medición de la firma electromagnética de un vehículo para deducir de ella datos digitalizados, secuenciados y fechados.
Por tanto, cada muestra digital se asocia a un instante o a un valor temporal identificado.
La invención permite secuenciar y fechar de manera sincronizada cada señal de firma electromagnética y cada punto de dato de esta firma electromagnética.
Por tanto, la invención permite fechar con precisión el paso de cada vehículo o, incluso, asociar un registro de fecha y hora a cada dato de firma electromagnética.
Además, el dispositivo comprende unos medios que permiten determinar si una señal recibida corresponde a la firma de un vehículo o si se trata únicamente de ruido.
El dispositivo según la invención permite utilizar un solo bucle por vía sobre la calzada. Por tanto, no es necesario un bucle suplementario. En consecuencia, basta un bucle por vía para efectuar mediciones tales como densidad de tráfico, tasa de ocupación, velocidad, intervalo vehicular, distancia intervehicular y categoría de silueta. En el caso de dos vías yuxtapuestas, se podrán utilizar dos bucles, pero con un solo bucle por vía.
Con un solo bucle, el dispositivo según la invención permite identificar la categoría de silueta de los vehículos y/o medir la velocidad de los vehículos.
Además, dicho dispositivo es compatible con las instalaciones existentes que utilizan bucles de detección estándares, lo cual evita sobrecostes de ingeniería civil.
Por tanto, la invención tiene asimismo por objeto un sistema de adquisición de datos de firmas electromagnéticas de vehículos, que comprende:
- un solo bucle electromagnético,
- un dispositivo según la invención, tal como se ha expuesto anteriormente, que permite tratar las señales electromagnéticas resultantes del bucle.
La invención se refiere asimismo a un dispositivo de tratamiento de señales o a un sistema de adquisición de datos de acuerdo con la invención y tal como se ha expuesto anteriormente, que comprende además unos medios de clasificación para clasificar los vehículos en por lo menos dos categorías en función de los datos o señales de firma electromagnética digitalizados y secuenciados.
Los medios de clasificación que tratan estas señales de firma electromagnética, se basan en el recorrido de una pluralidad de árboles de decisión.
Así, se obtiene una clasificación robusta. Además, este tipo de clasificación es compatible con un número de categorías superior a 6, por ejemplo 14.
La invención se refiere asimismo a un procedimiento de tratamiento de señales de firmas electromagnéticas de vehículos, que comprende:
- la producción de señales de firma electromagnética, digitalizadas, secuenciadas y fechadas,
- la clasificación de los vehículos en por lo menos dos categorías, en función de las señales de firma electromagnética, digitalizadas, secuenciadas...
Reivindicaciones:
1. Dispositivo de tratamiento de datos de firmas electromagnéticas de vehículos obtenidas a partir de señales electromagnéticas sobre una calzada que comprende unas vías de paso, provistas cada una de ellas de un solo bucle electromagnético, que comprende:
2. Dispositivo según la reivindicación 1, caracterizado porque los medios de clasificación muestrean previamente cada señal de firma electromagnética, y producen un conjunto de datos digitalizados así como unos datos característicos de armónicos de la señal de firma electromagnética.
3. Dispositivo según la reivindicación 2, caracterizado porque los datos característicos de armónicos de la señal de firma electromagnética comprenden unos datos de amplitud, de fase, de tasa de armónicos y de relaciones de amplitudes de armónicos de la señal de firma electromagnética.
4. Dispositivo según una de las reivindicaciones 1 a 3, caracterizado porque los medios (22, 54) de clasificación permiten, además, clasificar los vehículos en 14 categorías.
5. Dispositivo según una de las reivindicaciones 1 a 3, caracterizado porque comprende, además, unos medios (22, 54) para calcular la velocidad de un vehículo a partir de dichos datos de firma electromagnética.
6. Dispositivo según una de las reivindicaciones 1 a 5, caracterizado porque comprende, además, unos medios para adaptar el intervalo de tiempo entre dichos datos de firma electromagnética en función de la duración real de la señal de firma electromagnética.
7. Procedimiento de tratamiento de datos de firmas electromagnéticas de vehículos obtenidas a partir de señales electromagnéticas sobre una calzada que comprende unas vías de paso, provistas cada una de ellas de un solo bucle electromagnético, que comprende las etapas siguientes:
8. Procedimiento según la reivindicación 7, que comprende, además, una etapa de registro de los datos digitales de cada señal durante un periodo de tiempo predeterminado (t1), y de comparación de estos datos registrados con un valor umbral.
9. Procedimiento según una de las reivindicaciones 7 u 8, en el que las señales electromagnéticas son unas señales de variaciones de frecuencia o de fase o de amplitud o de impedancia.
10. Procedimiento según una de las reivindicaciones 7 a 9, en el que la calzada comprende dos vías, y en el que se identifican los vehículos que cabalgan sobre las dos vías.
11. Procedimiento según una de las reivindicaciones 7 a 10, en el que se adquieren, además, unos datos de firma de vehículos en movimiento superpuestos a una firma de un vehículo detenido.
12. Procedimiento según la reivindicación 11, en el que se aíslan los datos de firma de los vehículos en movimiento de los datos de firma de los vehículos detenidos.
13. Procedimiento según la reivindicación 7, caracterizado porque dicha etapa de clasificación comprende:
14. Procedimiento según la reivindicación 13, en el que se calcula la velocidad de los vehículos a partir de dichos datos de firma electromagnética.
15. Procedimiento según una de las reivindicaciones 7 a 14, en el que se clasifican los vehículos en 14 categorías.
Patentes similares o relacionadas:
Sistema de gestión de aparcamiento, del 30 de Enero de 2019, de ONE SITU: Un método para monitorear un espacio de aparcamiento por un parquímetro , comprendiendo el método: determinar y comunicar, mediante el parquímetro […]
Sistema y procedimiento de clasificación de vehículos, del 17 de Septiembre de 2018, de Global Traffic Technologies LLC: Un procedimiento de clasificación de vehículos, que comprende: generar una forma de onda de señal a partir de una señal en un único bucle inductivo, […]
Procedimiento y dispositivo de transmisión de datos entre un vehículo y un dispositivo en tierra, del 17 de Mayo de 2017, de CAPSYS: Procedimiento de transmisión de datos entre un vehículo equipado con un dispositivo electrónico integrado que comprende un circuito de emisión/recepción […]
 SISTEMA DE DETECCIÓN E IDENTIFICACIÓN DE VEHÍCULOS RODADOS, del 19 de Junio de 2015, de UNIVERSIDAD POLITECNICA DE MADRID: Sistema de detección e identificación de vehículos rodados.
Sistema que incorpora un método de detección e identificación de vehículos rodados de cualquier […]
SISTEMA DE DETECCIÓN E IDENTIFICACIÓN DE VEHÍCULOS RODADOS, del 19 de Junio de 2015, de UNIVERSIDAD POLITECNICA DE MADRID: Sistema de detección e identificación de vehículos rodados.
Sistema que incorpora un método de detección e identificación de vehículos rodados de cualquier […]
MÉTODO Y APARATO PARA DETECTAR CONTINUAMENTE LA PRESENCIA DE VEHÍCULOS CON UN SENSOR ÓPTICO Y UN SENSOR MAGNÉTICO, del 29 de Febrero de 2012, de UNIVERSITAT POLITECNICA DE CATALUNYA: Método y aparato para detectar continuamente la presencia de vehículos con un sensor óptico y un sensor magnético.En la presente invención se describe un método y un aparato […]
SISTEMA AUTOMATIZADO DE MONITORIZACIÓN Y COMUNICACIÓN DE INFRACCIONES DE TRÁFICO, del 23 de Agosto de 2011, de REDFLEX TRAFFIC SYSTEMS PTY LTD: Sistema que comprende un sistema de cámaras para producir pruebas primarias de una infracción de tráfico en una ubicación de tráfico, comprendiendo el sistema de cámaras […]
 SISTEMA Y PROCEDIMIENTO DE DETECCIÓN DE INFORMACIÓN DE TRÁFICO, del 4 de Marzo de 2011, de MORU INVEN CO., LTD: Sistema de detección de información de tráfico que comprende: al menos una bobina de bucle instalada para de este modo detectar si […]
SISTEMA Y PROCEDIMIENTO DE DETECCIÓN DE INFORMACIÓN DE TRÁFICO, del 4 de Marzo de 2011, de MORU INVEN CO., LTD: Sistema de detección de información de tráfico que comprende: al menos una bobina de bucle instalada para de este modo detectar si […]
 SISTEMA DE ALERTA DIRECCIONAL PARA VEHICULOS, del 10 de Febrero de 2011, de SOCIEDAD IBERICA DE CONSTRUCCIONES ELECTRICAS, S.A.: Sistema de alerta direccional para vehículo.Especialmente concebido para permitir generar señales de alerta ante la circulación de un vehículo en sentido contrario […]
SISTEMA DE ALERTA DIRECCIONAL PARA VEHICULOS, del 10 de Febrero de 2011, de SOCIEDAD IBERICA DE CONSTRUCCIONES ELECTRICAS, S.A.: Sistema de alerta direccional para vehículo.Especialmente concebido para permitir generar señales de alerta ante la circulación de un vehículo en sentido contrario […]