Procedimiento de estimación de desfases de imágenes de línea obtenidos por un sensor de imagen de barrido espacial o aerotransportado.
Procedimiento de estimación de desplazamientos de imágenes de líneas de una imagen,
dicha "imagen compuesta", está constituida por la yuxtaposición de J imágenes de líneas, en el que:
- las imágenes de líneas representan una escena en la superficie (S) de un cuerpo celeste, adquirida sucesivamente mediante una línea de células sensibles de un sensor (10) situado en un vehículo que sobrevuelan dicho cuerpo celeste, estando constituida cada imagen de línea por una pluralidad de píxeles,
- una imagen de línea Lj,1≤ j ≤ J, presenta un desplazamiento lateral y/o longitudinal entre la posición que la imagen de línea Lj está destinada a ocupar en la imagen compuesta y la posición que debería ocupar por el hecho de un error de visión del sensor (10) en el transcurso de la adquisición de la imagen de línea Lj,
dicho procedimiento está caracterizado por que las imágenes de líneas representan porciones diferentes de la escena y por que el desplazamiento lateral y/o longitudinal de una imagen de línea Lj, respecto del imagen de línea Li, j diferente de i, es estimada en función de un modelo local de variación lateral y/o longitudinal de la similitud entre imágenes de línea diferentes.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2010/060988.
Solicitante: ASTRIUM SAS.
Nacionalidad solicitante: Francia.
Dirección: 12, rue Pasteur 92150 Suresnes FRANCIA.
Inventor/es: FRAISSE,RENAUD, CROMBEZ,VINCENT.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C21/16 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › mediante la integración de la aceleración o la velocidad, p. ej. navegación inercial.
- G06T7/00 G […] › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Análisis de imagen.
PDF original: ES-2507150_T3.pdf
Fragmento de la descripción:
Procedimiento de estimación de desfases de imágenes de línea obtenidos por un sensor de imagen de barrido espacial o aerotransportado
La presente invención pertenece al dominio de la explotación de imágenes obtenidas por un sensor de imagen de barrido ubicado a bordo de un vehículo que sobrevuela un cuerpo celeste. Más particularmente, la presente invención concierne un procedimiento de estimación de desfases de imágenes en línea que representan diferentes porciones de una escena en la superficie de un cuerpo celeste.
Un sensor de imagen de barrido (conocido bajo el nombre de "push broom" en la literatura anglosajona) incluye generalmente una pluralidad de células sensibles situadas en línea. La línea de visión del captador está dirigida hacia la superficie del cuerpo celeste observado, por ejemplo la Tierra, y forma con la línea de células sensibles un plano, llamado "plano de visión".
Al hacer desfilar el plano de visión del sensor sobre una escena en la superficie de la Tierra, se adquieren sucesivamente imágenes en línea que se corresponden con diferentes porciones de la escena, incluyendo una pluralidad de pixels producidos por las diferentes células sensibles del sensor. Las imágenes en línea están destinadas a ser yuxtapuestas, de manera que formen una Imagen, llamada "imagen compuesta", que representa todo o parte de la escena.
Por yuxtaposición, se entiende la operación que consiste en formar una imagen compuesta constituida por una matriz de píxeles de dos dimensiones a partir de líneas de Imágenes adquiridas sucesivamente de manera que las líneas de la matriz de píxeles de la Imagen compuesta corresponda con las imágenes de líneas sucesivas, y las columnas de la imagen compuesta están por definición compuestas por todos los píxeles del mismo índice de las diferentes Imágenes en línea.
El barrido del plano de visión del sensor se efectúa por ejemplo mediante el desplazamiento del vehículo respecto de la Tierra, en cuyo caso el sensor es generalmente inmóvil en una referencia asociada al vehículo y está situado transversalmente en la trayectoria de dicho vehículo respecto de la Tierra, preferentemente de forma perpendicular a dicho trayectoria si se trata de maximizar el batido del instrumento.
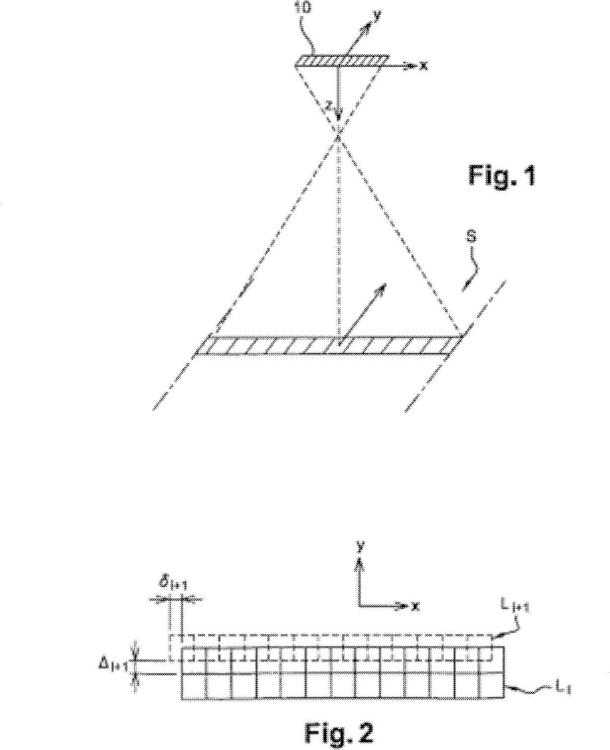
La figura 1 representa esquemáticamente en perspectiva en vuelo sobre una escena de un sensor 1 de barrido.
Se asocia al sensor 1 una referencia que Incluye tres ejes X,Y y Z, ortogonales entre sí, en el que el eje X es paralelo al eje de la línea de células sensibles del sensor 1, el eje Y es paralelo a la dirección del desplazamiento de dicho sensor, el eje Z está orientado hacia la tierra, y forma con la línea de visión de dicho sensor un ángulo de valor conocido, eventualmente nulo, en ausencia de vibraciones.
En general, la adquisición de imágenes en línea por el sensor es simultánea para cada célula sensible y con un periodo de muestreo entre dos adquisiciones consecutivas sensiblemente constante.
Así, en el transcurso de una secuencia de observación, las imágenes en líneas sucesivas representan unas porciones sucesivas diferentes de la escena observada, sensiblemente alineadas una respecto de las otras y espaciadas unas de otras por un intervalo espacial sensiblemente constante (cuando la velocidad horizontal del vehículo es sensiblemente constante).
Sin embargo, dichos sensores (espaciales o aerotransportados) están sometidos a vibraciones que inducen movimientos no deseados de la línea de visión, produciendo separaciones entre las posiciones teóricas las porciones observadas en el seno de la escena y sus posiciones reales.
Éstas separaciones se encuentran, a nivel de las Imágenes en línea, con la forma de desfases entre la posición que una imagen en línea va ocupar en la imagen compuesta (por simple yuxtaposición de este imagen en línea, como se ha indicado anteriormente) y la posición que debería ocupar en dicha imagen compuesta, para tener en cuenta el error de visión inducido por los movimientos no deseados de la línea de visión del sensor 1.
La figura 2 representa esquemáticamente en trazos continuos las posiciones de las dos imágenes en línea consecutivas L¡ y L¡+1 en el seno de una imagen compuesta. Estas están yuxtapuestas, alineando los píxeles. Se ha representado en trazos discontinuos la posición en el seno de la imagen compuesta que debería ocupar la línea L¡+1, teniendo en cuenta el hecho que representa una porción de la escena sensiblemente desfasada respecto de la porción teóricamente visualizada.
Se comprende por tanto que, por el hecho del desfase de la imagen en línea L¡+1, se van a inducir unas deformaciones geométricas en la Imagen compuesta.
Los movimientos de la línea de visión causados por vibraciones de baja frecuencia (comprendidas en un margen que va desde Hercios hasta algunas decenas de Hercios), son generalmente estimadas en el transcurso de la adquisición por medio de sensores dedicados, tales como giroscopios, de manera que es posible determinar y corregir los desfases de las imágenes en línea causados por las vibraciones de baja frecuencia.
En cambio, los movimientos de la línea de visión causados por vibraciones de alta frecuencia (comprendidas entre algunas decenas de Hercios y algunos millares de Hercios) no se determinan en el transcurso de la adquisición por medio de sensores dedicados, en particular ya que no se corresponden con movimientos del conjunto del vehículo sino más bien con vibraciones locales y/o de su soporte.
Se conoce de la solicitud de patente FR 2 899 344 y de la solicitud de patente US 28/31528 la restitución de la línea de visión de un instrumento en función de dos imágenes que representan la misma porción de una escena observada. Las zonas características homologadas, que se corresponden con el mismo punto de la escena observada, se hacen corresponder en cada una de estas imágenes. La línea de visión es después restituida mediante comparación de las posiciones en estas zonas características en cada una de dichas imágenes que representan la misma escena. Esta solución se basa, para la determinación de las zonas características homologadas que se corresponde con el mismo punto de la escena observada, en el hecho de disponer de al menos dos imágenes que representan la misma porción de la escena. Esta solución no es aplicable para restituir la línea de visión en función de imágenes de líneas de una imagen compuesta, dichas imágenes de línea representan porciones diferentes de la escena observada.
No se conoce una solución que permita corregir los desfases de las imágenes de líneas de una Imagen compuesta, adquiridas por un sensor de barrido, espacial o aerotransportado, en el caso donde no se disponga de al menos dos imágenes que representan una misma porción de la escena observada.
La presente invención se propone resolver los problemas anteriormente mencionados por medio de un procedimiento de estimación del desplazamiento de imágenes de líneas de una imagen compuesta, constituida por la yuxtaposición de J imágenes en líneas, en el que las imágenes en líneas representan diferentes porciones de una escena en la superficie de un cuerpo celeste, adquiridas sucesivamente mediante una línea de células sensibles de un sensor ubicado en un vehículo que sobrevuela dicho cuerpo celeste, cada Imagen en línea está constituida por una pluralidad de píxeles, y una imagen en línea Lj, 1< j < J, presenta un desfase lateral y/o longitudinal entre la posición que la imagen en línea Lj está destinada a ocupar en la imagen compuesta y la posición que debería ocupar por el hecho de un error de visión del sensor en el transcurso de la adquisición de la imagen en línea Lj..
Según el invento, el desfase lateral y/o longitudinal que tiene la imagen en línea Lj respecto de una imagen en línea L¡, siendo j diferente de i, está estimado en función de un modelo local de variación lateral y/o longitudinal de la similitud entre imágenes en línea diferentes.
Preferentemente, el modelo local de variación lateral y/o longitudinal del parecido entre imágenes en línea diferentes está determinado por el cálculo de valores de entre imágenes en línea diferentes de la Imagen compuesta.
Preferentemente, el procedimiento de estimación de los desfases de las imágenes en líneas incluye una etapa de estimación del desfase lateral relativo ój de la imagen en línea Lj respecto de la Imagen en línea Lj, en el transcurso de la cual el modelo local de variación lateral de similitud entre imágenes en línea sucesivas está determinado calculando valores de similitud de la imagen en línea Lj con la imagen en línea Lj para una pluralidad de valores de... [Seguir leyendo]
Reivindicaciones:
1- Procedimiento de estimación de desplazamientos de imágenes de líneas de una imagen, dicha "imagen compuesta", está constituida por la yuxtaposición de J imágenes de líneas, en el que:
las imágenes de líneas representan una escena en la superficie (S) de un cuerpo celeste, adquirida sucesivamente mediante una línea de células sensibles de un sensor (1) situado en un vehículo que sobrevuelan dicho cuerpo celeste, estando constituida cada imagen de línea por una pluralidad de píxeles,
una Imagen de línea Lj,1<j < J, presenta un desplazamiento lateral y/o longitudinal entre la posición que la imagen de línea Lj está destinada a ocupar en la imagen compuesta y la posición que debería ocupar por el hecho de un error de visión del sensor (1) en el transcurso de la adquisición de la Imagen de línea Lj,
dicho procedimiento está caracterizado por que las imágenes de líneas representan porciones diferentes de la escena y por que el desplazamiento lateral y/o longitudinal de una Imagen de línea Lj, respecto del Imagen de línea L¡, j diferente de i, es estimada en función de un modelo local de variación lateral y/o longitudinal de la similitud entre imágenes de línea diferentes.
2- Procedimiento de estimación según la reivindicación 1, en el que el modelo local de variación lateral y/o longitudinal de la similitud entre imágenes de línea diferentes es determinado mediante cálculo de valores de similitud entre Imágenes de líneas diferentes de la imagen compuesta.
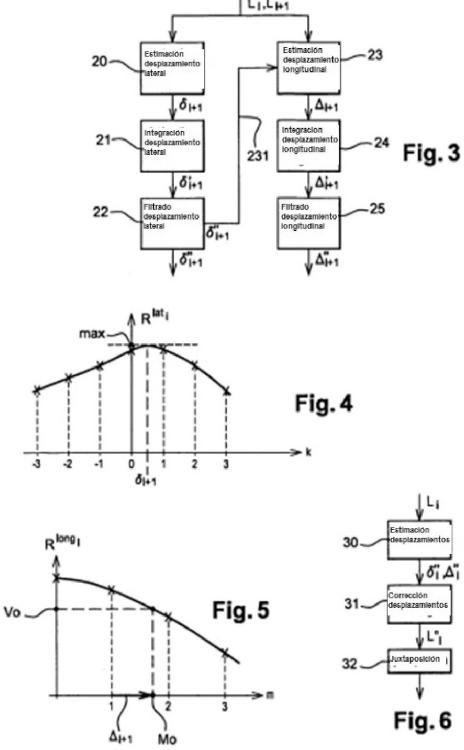
3- Procedimiento de estimación según la reivindicación 2, Incluyendo una etapa (2) de estimación del desplazamiento lateral relativo ój de la Imagen de línea Lj respecto de la imagen de línea L¡, en el transcurso de la cual el modelo local de variación lateral de similitud entre imágenes de líneas sucesivas es determinado calculando valores de similitud de la imagen de línea Lj con la imagen de línea Lj para una pluralidad de valores de traslación lateral de una línea respecto de la otra, estando estimado el desplazamiento lateral relativo 5j como la traslación lateral para la cual el valor del modelo de variación lateral similitud es máximo.
4- Procedimiento de estimación según la reivindicación 3, en el que el desplazamiento lateral relativo ój de la imagen de línea Lj, respecto de una imagen de línea L¡, es un número entero relativo o un número real de píxeles.
5- Procedimiento de estimación según la reivindicación 3 o 4, que Incluye una etapa (21) de Integración de los desplazamientos laterales relativos ój de imágenes de líneas sucesivas, para determinar los desplazamientos laterales acumulados ó) respecto de la imagen de línea de referencia de la Imagen compuesta.
6- Procedimiento de estimación según la reivindicación 5, que Incluye una etapa (22) de filtrado paso alto de los desplazamientos laterales relativos ój o acumulados ój.
7- Procedimiento de estimación según una de las reivindicaciones 2 a 6, que incluye una etapa (23) de estimación del desplazamiento longitudinal relativo Aj de la imagen de línea Lj respecto de la imagen de línea L¡, en el transcurso de la cual se calcula un valor de similitud de la imagen de línea Lj y de la imagen de línea L¡, y se estima el desplazamiento longitudinal relativo Aj en función de la separación longitudinal correspondiente, según el modelo local de variación longitudinal de similitud, a dicho valor de similitud de la Imagen de línea Lj y de la imagen de línea L¡.
8- Procedimiento de estimación según la reivindicación 7, en el que, cuando los desplazamientos laterales han sido previamente estimados, la etapa (23) de estimación del desplazamiento longitudinal relativo Aj es aplicada a imágenes de líneas Lj en lugar de imágenes de líneas Lj, 1< j < J, dichas Imágenes de líneas Lj se corresponden con las Imágenes de líneas Lj después de la corrección de dichos desplazamientos laterales estimados.
9- Procedimiento de estimación según la reivindicación 7 u 8, en el que el modelo local de variación longitudinal de similitud entre imágenes de líneas sucesivas es calculado, para una separación longitudinal teórica dada entre dos imágenes de líneas, haciendo la media de los valores de similitud calculados para una pluralidad de pares de Imágenes de líneas de la imagen compuesta espaciadas por dicha separación longitudinal teórica dada.
1- Procedimiento de estimación según la reivindicación 9, en el que el modelo local de variación longitudinal de similitud entre imágenes de líneas sucesivas es calculado entre las separaciones longitudinales teóricas mediante Interpolación en función de los valores calculados para las separaciones longitudinales teóricas.
11- Procedimiento de estimación según una de las reivindicaciones 7 a 1, que Incluye una etapa (24) de Integración de los desplazamientos longitudinales relativos Aj de las imágenes de líneas sucesivas para determinar
unos desplazamientos longitudinales acumulados Aj respecto de una Imagen de línea de referencia de la imagen compuesta.
12- Procedimiento de estimación según la reivindicación 11, que incluye una etapa (25) de filtrado paso alto de los desplazamientos longitudinales relativos o acumulados.
13- Procedimiento de estimación según una de las reivindicaciones anteriores, en el cual las etapas del procedimiento de estimación son iteradas al menos una vez.
14- Procedimiento de formación de imágenes compuestas a partir de imágenes de líneas que presentan unos desplazamientos, caracterizado por que incluye al menos:
-una etapa (3) de estimación de los desplazamientos de las imágenes de líneas que lleva a cabo el procedimiento de estimación según una de las reivindicaciones anteriores,
-una etapa (31) de corrección de los desplazamientos estimados sobre las imágenes de líneas,
-una etapa (32) de yuxtaposición de las imágenes de líneas corregidas.
15- Procedimiento de formación de imágenes compuestas a partir de imágenes de líneas que presentan unos desplazamientos, caracterizado por que incluye:
-una etapa (3) de estimación de los desplazamientos de un primer juego de imágenes de líneas adquiridas para un primer sensor (1), que ejecuta el procedimiento de estimación según una de las reivindicaciones 1 a 13,
una etapa de conversión de los desplazamientos estimados en un segundo juego de desplazamientos para un segundo juego de imágenes de líneas, adquiridas mediante un segundo sensor situado en el vehículo y sometido sensiblemente a los mismos errores de visión que el primer sensor (1),
una etapa (31) de corrección del segundo juego de desplazamientos sobre el segundo juego de imágenes
de líneas,
una etapa (32) de yuxtaposición del segundo juego de imágenes de líneas corregidas.
Patentes similares o relacionadas:
Generación de estimación de la gravedad de la Tierra, del 3 de Junio de 2020, de Helsingin Yliopisto: Un procedimiento para generar estimaciones de la gravedad de la Tierra para períodos de tiempo secuenciales, en el que el procedimiento, llevado a cabo por un aparato , […]
Procedimiento y dispositivo para determinar parámetros de medición inerciales, del 6 de Mayo de 2020, de MBDA Deutschland GmbH: Procedimiento para determinar los parámetros de medición inerciales mediante una unidad de medición inercial que presenta sensores inerciales , donde al […]
Método y sistema de navegación inercial asistido por GPS, del 18 de Marzo de 2020, de IMI Systems Ltd: Un método de navegación inercial asistido por GPS que comprende: proporcionar múltiples sensores que incluyen múltiples unidades de medición de inercia (IMU) y al menos […]
Dispositivo y procedimiento de mantenimiento de actitud de un portador que utiliza girómetros, del 18 de Marzo de 2020, de Safran Electronics & Defense: Dispositivo de mantenimiento de actitud de un portador, comprendiendo el dispositivo: · tres girómetros primarios dispuestos […]
 Procedimiento de estimación del movimiento de un peatón, del 25 de Diciembre de 2019, de SYSNAV: Procedimiento de estimación del movimiento de un peatón en marcha que comprende las etapas de:
(a) medir una aceleración y una velocidad […]
Procedimiento de estimación del movimiento de un peatón, del 25 de Diciembre de 2019, de SYSNAV: Procedimiento de estimación del movimiento de un peatón en marcha que comprende las etapas de:
(a) medir una aceleración y una velocidad […]
Localización dentro de un entorno usando fusión de sensores, del 4 de Diciembre de 2019, de THE BOEING COMPANY: Un aparato que comprende: una pluralidad de sistemas de datos configurados para generar una pluralidad de flujos de datos en la cual la pluralidad de flujos […]
Procedimiento de gestión automática de un girómetro longitudinal montado en un aparato volador, del 20 de Noviembre de 2019, de MBDA FRANCE: Procedimiento de gestión automática de un girómetro longitudinal que está montado sobre un misil aéreo, susceptible de ser puesto en rotación, procedimiento […]
Ayudas de navegación para sistemas aéreos no tripulados en un entorno sin GPS, del 13 de Noviembre de 2019, de THE BOEING COMPANY: Método para estimar una posición o trayectoria de una aeronave en un entorno sin GPS que comprende: obtener, mediante un sistema de navegación inercial, una […]