Mecanismo del tipo articulado de morfología serial-paralela de cuatro grados de libertad para apuntar y guiar dispositivos hacia dianas distales.
Sistema paralelo de cuatro grados de libertad para apuntar y guiar dispositivos hacia dianas distales.
El sistema está formado por dos mecanismos paralelos tipo SCARA, cada uno de los cuales está formado por dos brazos (2, 4) articulados entre sí por juntas rotacionales (3), y los brazos (4) articulados entre sí en correspondencia con efectores finales (5), siendo dicha articulación rotacional-esférica formada por un cojinete o rodamiento (7) y una rótula esférica (8), de manera que en correspondencia con esas articulaciones va montado un cilindro telescópico (9-11) que es hueco y en el que se introduce el dispositivo (17) que puede estar formado por un catéter, aguja quirúrgica u otro dispositivo similar, siendo accionados los brazos (2, 4) por motores (14) para que el dispositivo (17) montado en el cilindro telescópico y hueco (9-11) pueda ser guiado, desplazado y posicionado en un punto concreto de un paciente, por ejemplo, situado sobre una mesa.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201331865.
Solicitante: UNIVERSIDAD POLITECNICA DE MADRID.
Nacionalidad solicitante: España.
Inventor/es: ARACIL SANTONJA, RAFAEL, SALTAREN PAZMIÑO,Roque Jacinto, PUGLISI,Lisandro José, GARCÍA CENA,Cecilia Elisabet, EJARQUE RINALDINI,Gonzalo Emanuel.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B19/00
- B25J11/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores no previstos en otro lugar.
- B25J17/02 B25J […] › B25J 17/00 Uniones. › Uniones articuladas.
Fragmento de la descripción:
Mecanismo del tipo articulado de morfología serial-paralela de cuatro grados de libertad para apuntar y guiar dispositivos hacia dianas distales.
OBJETO DE LA INVENCIÓN
La presente invención se refiere a un sistema paralelo de cuatro grados de libertad para apuntar y guiar dispositivos hacia dianas distales, previsto preferente y fundamentalmente para su aplicación en intervenciones quirúrgicas mínimamente invasivas, en las que es 10 necesario manipular un útil para su aproximación y posicionado exacto en la ejecución de la propia intervención quirúrgica.
El objeto de la invención es conseguir un medio de guiado y posicionamiento de, por ejemplo, catéteres quirúrgicos, o bien dispositivos que deben apuntar y seguir dianas a 15 distancia, en donde el posicionamiento y guiado se realiza de forma robótica, en una actuación rápida, sencilla y de fácil control, pudiendo ser el dispositivo o útil manipulado robóticamente a gran velocidad.
ANTECEDENTES DE LA INVENCIÓN 20
En las tareas de posicionamiento y guiado de dispositivos hacia dianas, y en particular en aplicaciones médicas como pueden ser las intervenciones quirúrgicas mínimamente invasivas, se utilizan diversos tipos de dispositivos, entre los que pueden citarse los de los documentos correspondientes a las patentes US2011271785 (A1) , ES2365359 T3, 25 ES2388029 A1, US 6246200B1, CN 202027713 (U) , US 6705871, entre otros, en donde ninguno de los dispositivos correspondientes a esos documentos incluye un sistema de posicionamiento como el que se describirá en la presente solicitud de patente.
Concretamente, en el documento ES2365359 T3 se describe un sistema quirúrgico robótico 30 para realizar procedimientos médicos mínimamente invasivos, que comprende al menos un manipulador robótico serial de 5 grados de libertad, contando en su extremo operativo con un actuador de instrumento laparoscópico, que proporciona un grado de libertad extra por medio de una sexta junta de revolución que presenta el actuador, con lo que el conjunto cuenta con 6 grados de libertad. 35
En cuanto al documento ES2388029 A1, en el mismo se describe otro sistema robótico para cirugía laparoscópica, basado en una estructura de soporte donde se acopla de manera deslizante, al menos, un brazo, de manera que cada brazo cuenta con dos eslabones articulados entre sí. El primer elemento está articulado de manera giratoria en la estructura 40 de soporte y puede girar alrededor de un eje longitudinal y el segundo elemento puede recibir una articulación de, por lo menos, dos grados de libertad para el acoplamiento de una herramienta.
Igualmente puede citarse el documento correspondiente a la patente US 763537 B2, en 45 donde se describe un manipulador para soporte y desplazamiento de un objeto, comprendiendo una parte móvil soporte del objeto, . dos manipuladores con 5 juntas rotacionales entre eslabones conectados a la base a través de dos juntas rotacionales cada uno, de manera que la parte móvil es conectada a ambos manipuladores a través de dos juntas especiales, comprendiendo además unos mecanismos articulados y unas juntas 50 especiales, dispuestas de tal forma que el movimiento de la parte móvil queda restringido a dos grados de libertad traslacionales y dos rotacionales con respecto a la base. Este manipulador soporte cuenta además con cuatro actuadores dispuestos sobre la base de manera tal que el movimiento se controla de forma independiente.
Otros documentos en los que se describen dispositivos con la misma finalidad o bien para aplicaciones industriales concretas, son los correspondientes a las patentes CN201881384 (U) , CN102476383 (A) , CN201864343 (U) , WO2011102629 (A2) , US2011271785 (A1) y TW200904606 (A) . 5
Igualmente puede citarse el documento correspondiente a la patente ES2262428B1, en el que se describe un "Robot paralelo de cuatro grados de libertad de rotación ilimitada", basándose, al igual que el sistema de la invención, en ser un mecanismo del tipo SCARA, aunque en el sistema que se describirá y correspondiente a la presente invención, los 10 grados de libertad que se consiguen en el efector final son diferentes a los de ese documento referido en la citada patente, puesto que en ésta el efector final está orientado a tareas de "Pick and Place", requiriéndose en este mecanismo tener al menos tres traslaciones en las coordenadas X, Y, Z.
En el documento correspondiente a la patente US 4.976.582., se describe un sistema también enfocado a tareas de "Pick and Place", cuyas características estructurales son bien diferentes a la del sistema a que se refiere la presente invención.
DESCRIPCIÓN DE LA INVENCIÓN 20
El sistema paralelo de cuatro grados de libertad para apuntar y guiar dispositivos hacia dianas distales, como puede ser una aguja quirúrgica u otros dispositivos tales como catéteres, pinzas, etc., utilizados en operaciones quirúrgicas laparoscópicas, está formado por dos mecanismos paralelos tipo SCARA unidos entre sí mediante un cilindro telescópico 25 formado por dos elementos cilíndricos de diferente diámetro, uno insertado en el interior del otro, formando entre si lo que es considerado como un eslabón telescópico, extensible mediante una articulación cilíndrica, estando dicho eslabón telescópico acoplado a los mecanismos paralelos tipo SCARA con juntas mecánicas complejas compuestas, cada junta, por una rótula esférica-rotacional, de manera que dicha estructura mecánica da lugar 30 a un sistema paralelo de cuatro grados de libertad que comprenden dos traslaciones en un plano y dos rotaciones perpendiculares al plano de traslación, resultando dicho tipo de movimientos especialmente apto para mecanismos que están enfocados hacia aplicaciones de apuntar hacia dianas en el espacio y que además requieran el seguimiento del objetivo, conocido como tracking. Este tipo de movimientos, de dos traslaciones y dos rotaciones, es 35 especialmente apto para operaciones quirúrgicas que implican usar catéteres o pinzas para laparoscopia.
En el caso de catéteres, el sistema de la invención facilita operaciones quirúrgicas que tiene que ver con la inserción de registros de oro en torno a tumores que posteriormente van a ser 40 irradiados, guiados por los registros de oro que funcionan como marcadores, debiendo los registros de oro ser insertados con precisión en torno a los tumores en base a imágenes médicas TAC que sirven para calcular la posición, la orientación y la profundidad de la inserción del registro.
Otra aplicación para el sistema de la invención, es el de la inserción de electrodos en operaciones del cerebro que buscan corregir anomalías causadas por la enfermedad del Parkinson, de manera que la inserción de electrodos profundos en la masa encefálica es una operación que requiere alta precisión por los enormes riesgos que conlleva, en orden a evitar dañar zonas sanas del cerebro. La inserción de electrodos al igual que los catéteres, 50 requiere que el cirujano realice la inserción de acuerdo a una diana previamente planificada en base a imágenes médicas que dan la posición y orientación del electrodo y la profundidad. Esta información vectorial en base a imágenes médicas, puede ser transmitida a un sistema de control que forma parte del sistema de la invención, para que se posicione y oriente en la zona requerida, facilitando al cirujano la inserción, ya sea por un dispositivo de inserción de precisión o manualmente.
Otra posible aplicación de la invención es para dirigir armamento hacia dianas calculadas con coordenadas que pueden ser introducidas en el sistema de control que forma parte del 5 sistema de la invención.
Otro tipo de aplicación tiene que ver con que el sistema paralelo puede ser utilizado para patas en robots móviles.
Otra posible aplicación es en robots submarinos para el control vectorial en el espacio de los impulsores.
Por otro lado, el sistema de la invención puede llevar ensamblados dispositivos para controlar con precisión la inserción a través de su efector final telescópico. 15
El sistema paralelo de la invención puede ser actuado manualmente y bloqueado con frenos, o bien actuado de manera automática con motores en las articulaciones de su base.
El efector final del sistema que establece el medio de articulación de los dos mecanismos 20 paralelos tipo SCARA, tiene en cada caso una articulación distal compleja de tipo rotacional-esférica, resultando dichas articulaciones concéntricas y basadas en un cojinete rotativo o rodamiento y una rótula esférica hueca, yendo en cada una de éstas soldado un eslabón cilíndrico con agujero central, del lado de unos de los mecanismos del tipo planar, mientras que en el otro mecanismo planar el eslabón...
Reivindicaciones:
1. Mecanismo del tipo articulado de morfología serial-paralela de cuatro grados de libertad para apuntar y guiar dispositivos hacia dianas distales, aplicable preferentemente en intervenciones quirúrgicas mínimamente invasivas, en las que es necesario manipular robóticamente un dispositivo, como puede ser un catéter, aguja quirúrgica u otro, para su 5 aproximación y posicionado sobre un paciente y realizar la ejecución de la intervención quirúrgica pretendida, se caracteriza porque comprende dos mecanismos paralelos (12) determinantes de dos cadenas de cinemática paralelas del tipo planar, con dos grados de libertad de traslación cada una, moviéndose en dos planos de trabajo separados y paralelos, y en donde ambos mecanismos paralelos (12) están acoplados entre si a través de un 10 efector final (5) que en cada caso presentan juntas mecánicas complejas del tipo rotacional esférica (10) , formadas por un cojinete rotativo o rodamiento (7) y una rótula esférica hueca (8) , uniéndose ambos mecanismos paralelos mediante un eslabón cilíndrico formado por un elemento cilíndrico interno (11) y un elemento cilíndrico externo (9) , acoplados telescópicamente entre si, estableciendo un cilindro o eslabón telescópico extensible 15 mediante una articulación cilíndrica.
2. Mecanismo del tipo articulado de morfología serial-paralela de cuatro grados de libertad para apuntar y guiar dispositivos hacia dianas distales, según reivindicación 1, caracterizado porque cada mecanismo paralelo (12) de tipo planar, con dos grados de libertad de 20 desplazamiento del centro de su articulación distal que hace de efector final (5) , está formada por dos parejas de brazos (2, 4) , articulados entre si a través de una articulación rotacional (3) , estando los brazos (2) unidos por un extremo de forma articulada a una base (1) y los brazos (4) unidos por su extremo opuesto a la articulación compleja rotacional-esférica (10) en la que está establecido el efector final (5) . 25
3. Mecanismo del tipo articulado de morfología serial-paralela de cuatro grados de libertad para apuntar y guiar dispositivos hacia dianas distales, según reivindicaciones anteriores, caracterizado porque el eslabón o cilindro telescópico (9-11) es hueco y permite la introducción de dispositivos tales como catéteres, agujas quirúrgicas (17) o ensamble de 30 otro tipo de dispositivos.
4. Mecanismo del tipo articulado de morfología serial-paralela de cuatro grados de libertad para apuntar y guiar dispositivos hacia dianas distales, según reivindicaciones anteriores, caracterizado porque los mecanismos paralelos que forman las parejas de brazos (2, 4) con 35 las articulaciones correspondientes, son accionadas por respectivos motores (14) , en combinación con un sensor de medición de posición angular rotativo (13) .
5. Mecanismo del tipo articulado de morfología serial-paralela de cuatro grados de libertad para apuntar y guiar dispositivos hacia dianas distales, según reivindicación 4, caracterizado 40 porque los motores de accionamiento (14) son susceptibles de ser reemplazados por un freno de bloqueo para permitir el accionamiento manual del sistema.
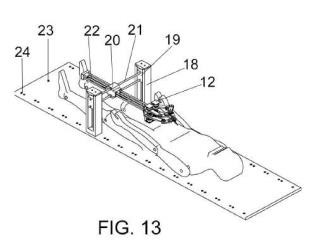
6. Mecanismo del tipo articulado de morfología serial-paralela de cuatro grados de libertad para apuntar y guiar dispositivos hacia dianas distales, según reivindicaciones anteriores, 45 caracterizado porque el sistema que forma las parejas de mecanismos paralelos (12) , es susceptible de estar ensamblado sobre un sistema de posicionado formado por bloques deslizantes (19) que deslizan sobre elementos de guía (18, 21 y 22) que posibilitan localizar el conjunto del sistema deseado a lo largo de la mesa (24) .
7. Mecanismo del tipo articulado de morfología serial-paralela de cuatro grados de libertad para apuntar y guiar dispositivos hacia dianas distales, según reivindicación 6, caracterizado porque el sistema de posicionado va montado sobre una mesa (23) en la que se sitúa el paciente, cuya mesa presenta parejas de orificios (24) en correspondencia con alineaciones próximas a los laterales longitudinales, para fijar a cada lado las columnas (18) que forman parte del sistema de posicionado y de guiado.
8. Mecanismo del tipo articulado de morfología serial-paralela de cuatro grados de libertad 5 para apuntar y guiar dispositivos hacia dianas distales, según reivindicaciones anteriores, caracterizado porque el sistema está configurado como un sistema paralelo más simple (15) , formado por el mismo tipo de elementos, pero únicamente por un par de brazos seriales en cada lado, paralelos y por articulados entre si a través de una articulación rotacional (3) , estando los brazos (2) unidos por un extremo de forma articulada a una base (1) y los 10 brazos (4) unidos por su extremo opuesto a la articulación compleja rotacional-esférica (10) en la que está establecido el efector final (5) , siendo los brazos (4) de cada mecanismo paralelo accionados preferiblemente mediante una transmisión por correa dentada (16) y su correspondiente motor (14) o en el caso manual por un freno de bloqueo articular.
9. Mecanismo del tipo articulado de morfología serial-paralela de cuatro grados de libertad para apuntar y guiar dispositivos hacia dianas distales, según reivindicaciones anteriores, caracterizado porque el sistema que forma las parejas de mecanismos paralelos (12, 15) , es susceptible de estar ensamblado sobre un sistema de posicionado unilateral formado por bloques deslizantes (25, 26, 27) que deslizan sobre elementos de guía que posibilitan 20 localizar el conjunto del sistema deseado a lo largo de la mesa (24) .
10. Mecanismo del tipo articulado de morfología serial-paralela de cuatro grados de libertad para apuntar y guiar dispositivos hacia dianas distales, según reivindicaciones anteriores, caracterizado porque los elementos y medios que participan en la estructura del sistema 25 paralelo, incluidos los medios de guiado y deslizantes, están realizados en materiales no magnéticos para permitir su aplicación en el campo de la medicina.
Patentes similares o relacionadas:
Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para la colocación de un objeto en un diente de un paciente, del 1 de Abril de 2020, de ALIGN TECHNOLOGY, INC.: Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para colocar un objeto en un diente de un […]
Combinación de un instrumento de terapia y formación de imagen, del 26 de Febrero de 2020, de ETHICON, INC.: Un instrumento combinado de terapia y formación de imágenes, comprendiendo el instrumento: una sonda de terapia para producir energía para alterar el tejido; […]
 Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Sistemas y métodos para la fabricación de una plantilla dental, del 28 de Mayo de 2019, de ALIGN TECHNOLOGY, INC.: Método para fabricación de una plantilla dental para posicionar un objeto en un diente de un paciente, que comprende: crear un modelo de diente […]
Endoscopio y dispositivo de tratamiento de accesorios integrado, del 4 de Marzo de 2019, de C.R. BARD, INC.: Endoscopio integrado que comprende un vástago que tiene extremos proximal y distal, y un dispositivo de aposición de tejido en el extremo distal […]
Microscopio quirúrgico y sensor de frente de onda integrados, del 7 de Marzo de 2018, de ALCON RESEARCH, LTD.: Un dispositivo para medir propiedades de un ojo , comprendiendo el dispositivo : un microscopio quirúrgico , un sensor de frente de […]
Fuente de alimentación para la identificación y control de herramientas quirúrgicas eléctricas, del 10 de Enero de 2018, de MICROLINE SURGICAL, INC: Un sistema para llevar a cabo cauterización térmica, que comprende: al menos un dispositivo de cauterización térmica, y una fuente de […]
Instalación para utilizar una plantilla con el fin de formar orificios para implantes en un maxilar, del 15 de Noviembre de 2017, de NOBEL BIOCARE SERVICES AG: Una instalación para formar orificios para implantes en un maxilar , comprendiendo la instalación una plantilla que se adapta a la forma […]