Mecanismo de dirección para un vehículo remolcado para dirigir uno o más ejes giratorios dirigidos.
Mecanismo de dirección (1) de un vehículo remolcado (3) para la dirección de uno o varios ejes giratorios dirigidos (2,
41) del vehículo remolcado (3) por el movimiento de curvado mutuo entre el vehículo remolcado y el vehículo remolcante o unidad tractora cuando se efectúa un giro, caracterizado por el hecho de que éste al menos tiene:
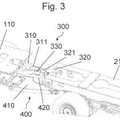
• un soporte giratorio (5) con una primera parte giratoria de soporte (6) y una segunda parte giratoria de soporte (7) que son girables una con respecto la otra, donde la primera parte giratoria de soporte (6) se puede acoplar al vehículo remolcado (3) y la segunda parte giratoria de soporte (7) se puede acoplar a una unidad tractora (4).
• un control (8) para la dirección de los ejes ya mencionados (2) que consiste en una biela (9) y un soporte que se puede acoplar al vehículo remolcado (3), donde el soporte al menos contiene un eje vertical (10) alrededor del cual está fijada la biela (9) de forma giratoria.
• un cable (11) cuyo primer extremo (12) está conectado a un primer lado (13) de la biela (9) y cuyo segundo extremo (14) está conectado a un segundo lado (15) de la biela (9), donde el eje vertical (10) del control (8) está localizado entre el primer lado ya mencionado (13) y el segundo lado (15) de la biela (9), donde una parte interyacente (16) del cable (11) es fijada alrededor de la segunda parte de soporte (7) para transmitir una rotación de la segunda parte de soporte giratorio (7) a una rotación de la biela (9); y,
• un equipo (17, 18) en cada extremo (12, 14) del cable (11), que consiste en dos o más poleas (19, 20), donde al menos una polea (19) de cada equipo (17, 18) se puede acoplar al vehículo remolcado (3), de ahora en adelante denominada la polea fija (19), y al menos una polea (20) de cada equipo (17, 18) se encuentra sobre la biela (9), de ahora en adelante denominada la polea móvil (20), y donde una parte (21) del cable (11) entre cada extremo (12, 14) y la parte interyacente (16) del cable (11) es guiada a través de las poleas (17, 18) del equipo en cuestión (17, 18).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2010/002477.
Solicitante: NV X-DRIVE.
Inventor/es: RENDERS,FRANS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D13/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 13/00 Dirección adaptada especialmente a los remolques (atalaje de tracción y de dirección combinados B60D). › para ejes de giro central.
PDF original: ES-2534357_T3.pdf
Fragmento de la descripción:
Mecanismo de dirección para un vehículo remolcado para dirigir uno o más ejes giratorios dirigidos [0001] La presente invención se refiere a un mecanismo de dirección para que un vehículo remolcado dirija uno o varios ejes giratorios dirigidos por el movimiento de doblado mutuo entre el vehículo remolcado y el vehículo remolcante o unidad tractora cuando se toma una curva.
Según el estado de la técnica ya hay muchos mecanismos de dirección para ejes giratorios de dirección en un vehículo remolcado.
El documento DE 20 2005 015 120 U1 divulga el preámbulo de la reivindicación 1.
Más específicamente, en los mecanismos de dirección conocidos se rota un primer soporte giratorio o haz de cable generalmente conforme al movimiento de rotación o curvado de una unidad tractora con respecto al vehículo remolcado, y se convierte en una rotación de un segundo haz de cable o soporte giratorio que dirige directamente uno o más ejes dirigibles.
Para la transmisión y conversión de la rotación mencionada anteriormente, se usan frecuentemente uno o varios cables o barras que acoplan el primer y segundo soporte giratorio o hazde cables uno a otro.
La fuerza requerida para dirigir los ejes dirigidos es así desarrollada por el movimiento de curvado relativo entre la unidad tractora y el vehículo remolcado cuando se toma una curva, y en semirremolques convencionales esta fuerza se limita en la práctica a alrededor de 10 toneladas.
Una desventaja de esto es que sólo pueden ser dirigidos un número limitado de ejes dirigidos y por consiguiente para vehículos remolcados con una alta capacidad de carga, y por consiguiente con un gran número de ejes, sólo un número limitado de ejes pueden ser hechos dirigibles, mientras que los demás ejes son ejes necesariamente fijos o rígidos.
Los vehículos remolcados conocidos, como es conocido, deben enfrentarse a un gran número de desventajas.
Una desventaja conocida es, entre otras, que cuando toman una curva, los neumáticos viran y friccionan oblicuamente en la superficie de la calle, especialmente los neumáticos en los ejes fijos no controlados.
Como resultado, los neumáticos se desgastan relativamente rápidamente, de manera que la vida útil de los neumáticos se limita a un máximo de 50.000 a 100.000 km.
El desgaste de los neumáticos por supuesto crea polvo de caucho fino de los neumáticos, que es nocivo para el medioambiente. Además esto asegura una montaña enorme de residuos de neumáticos gastados para los cuales no hay hasta el momento tratamiento de residuos adecuados o reciclaje.
Debido al viraje y fricción de los neumáticos también ocurren grandes fuerzas axiales oblicuas en los ejes que aumentan la temperatura en los soportes y en los conjuntos de eje de manera que la grasa en estos componentes envejece más rápidamente y estos componentes deben ser inspeccionados y mantenidos a intervalos de tiempo regulares.
El viraje y fricción también causan resistencia aumentada a la rodadura, de manera que la unidad tractora debe tirar del vehículo remolcado a través de la curva con una fuerza superior, que a su vez significa un consumo de combustible superior y un desgaste aumentado de los neumáticos de la unidad tractora.
El fenómeno de viraje y fricción se acopla también con una generación no insignificante de ruido cuando se toma una curva.
Otra desventaja significativa de los vehículos tirados de forma convencional es el punto ciego. Es de hecho conocido que cuando se toma una curva un vehículo remolcado se puede desviar al interior o exterior hasta 1.5 metros, lo cual puede presentar riesgos considerables para gente o cosas que están en el círculo de rotación del vehículo remolcado, ciertamente cuando el conductor de la unidad tractora no tiene una buena perspectiva de la situación, lo que ocurre frecuentemente.
Para limitar de alguna manera el viraje y la fricción, en vehículos remolcados de forma convencional los ejes se colocan relativamente cerca el uno del otro, al menos visto desde la dirección de transmisión, lo que asegura frecuentemente una distribución no ideal del peso sobre los ejes y el riesgo de volcar cuando se frena repentinamente.
Para vehículos remolcados con una capacidad de carga mayor y un gran número de ejes dirigidos, se usan generalmente construcciones especiales y costosas que están hechas a medida según el tonelaje del vehículo tirado.
[0018]Otra desventajadelosmecanismosdedirección conocidosesquesusdimensionessonfrecuentementemuy grandes y son relativamente pesadas, de manera que la carga útil que se puede transportar se reduce y la construcción delmecanismo de dirección es por ello problemática a veces en el vehículo remolcado.
En los mecanismos de dirección conocidos donde el movimiento de rotación de la unidad tractora con respecto alvehículo arrastrado se transmite mediante una barra o barras, hay una desventaja adicional.
En tal caso el ángulo a través del cual la unidad tractora puede rotar con respecto al vehículo remolcado es limitada por la barra o barras, por ejemplo sólo debido a que la barra o barras está/están limitadas sólo por restricciones internas en elmecanismo a través de su conexión al soporte giratorio de dirección.
Otra desventaja en tal caso es que la barra o barras tienen un efecto inverso en el eje o ejes por ser dirigidos tan pronto como se alcanza un ángulo de 90º entre la unidad tractora y el vehículo remolcado, que por supuesto no puede ser la intención.
La razón para esto es que el desplazamiento angular de la barra o barras aumenta hasta que se alcanza el ángulo ya mencionado de 90º entre la unidad tractora y vehículo remolcado, después de lo cual el desplazamiento angular de la barra o barras disminuye otra vez con cualquier otra rotación de la unidad tractora con respecto al vehículo remolcado, si es que esto es posible.
Otra desventaja de los mecanismos de dirección conocidos es que no se pueden usar en vehículos remolcados tales como semirremolques con un chasis extensible con longitud ajustable, ya que la distancia entre el soporte giratorio frontal con el cual el vehículo remolcado se acopla a la unidad tractora y los ejes de la parte extensible es variable. En tales casos los ejes dirigidos deben ser necesariamente abandonados.
El propósito del presente invención es proporcionar una solución a las desventajas mencionadas anteriormente y cualquier otra desventaja.
Para este fin la invención se refiere a un mecanismo de dirección de un vehículo tirado para dirigir uno o varios ejes dirigidos giratorios del vehículo remolcado, que al menos tiene:
â?¢ Un soporte giratorio con una primera parte de soporte giratoria y una segunda parte de soporte giratoria que pueden ser giradas la una respecto de la otra, donde la primera parte de soporte giratoria puede ser acoplada al vehículo remolcado y la segunda parte de soporte giratoria puede ser acoplada a una unidad tractora.
â?¢ Un control para la dirección de los ejes ya mencionados que consiste en una biela y un soporte que pueden ser acoplados al vehículo remolcado, donde elsoporte contiene almenos un eje vertical alrededor del cual puede ser girada la biela.
â?¢ Un cable cuyo primer extremo se conecta a un primer lado de la biela y cuyo segundo extremo se conecta a un segundo lado de la biela, donde el eje vertical del control está localizado entre los ya mencionados primer lado y segundo lado de la biela, donde una parte inter y acente del cable es colocada alrededor de la segunda parte de soporte para transmitir la rotación de la segunda parte de soporte a una rotación de la biela; y,
â?¢ Un equipo a cada extremo del cable, que consiste en dos o más poleas, donde al menos una polea de cada equipo se puede acoplar al vehículo remolcado, de ahora en adelante la polea fija, y al menos una polea de cada equipo está sobre la biela, de ahora en adelante la polea móvil, y donde una parte del cable entre cada extremo y la parte inter y acente del cable es guiada a través las poleas del equipo en cuestión.
Una primera gran ventaja de tal mecanismo de dirección según la invención consiste en el cable que transmite el movimiento del soporte giratorio a la biela del controlsiendoguiadosobre dosequipos, de manera que se requiereuna fuerza muchomás pequeñaporparte delsoporte giratoriopara girarla bielaylos ejesacoplados a ella, en comparación con la transmisión de fuerza desde el soporte giratorioa la biela por un cable que no es guiado sobre tales equipos. Con unmecanismodedirección según lainvención, conla mismafuerza máxima disponible en el soporte giratorio, se puede desarrollar una fuerza muy superior... [Seguir leyendo]
Reivindicaciones:
1. Mecanismo de dirección (1) de un vehículo remolcado (3) para la dirección de uno o varios ejes giratorios dirigidos (2, 41) del vehículo remolcado (3) por el movimiento de curvado mutuo entre el vehículo remolcado y el vehículo remolcante o unidad tractora cuando se efectúa un giro, caracterizado por el hecho de que éste al menos tiene:
â?¢ un soporte giratorio (5) con una primera parte giratoriade soporte (6) yunasegundaparte giratoria de soporte (7) que son girables una con respecto la otra, donde la primera parte giratoria de soporte (6) se puede acoplar al vehículo remolcado (3) y la segunda parte giratoria de soporte (7) se puede acoplar a una unidad tractora (4) .
â?¢ un control (8) para la dirección de los ejes ya mencionados (2) que consiste en una biela (9) y un soporte que se puede acoplar al vehículo remolcado (3) , donde el soporte al menos contiene un eje vertical (10) alrededor del cual está fijada la biela (9) de forma giratoria.
â?¢ un cable (11) cuyo primer extremo (12) está conectado a un primer lado (13) de la biela (9) y cuyo segundo extremo (14) está conectado a un segundo lado (15) de la biela (9) , donde el eje vertical (10) del control (8) está localizado entre el primer lado ya mencionado (13) y el segundo lado (15) de la biela (9) , donde una parte inter y acente (16) del cable (11) es fijada alrededor de la segunda parte de soporte (7) para transmitir una rotación de la segunda parte de soporte giratorio (7) a una rotación de la biela (9) ; y,
â?¢ un equipo (17, 18) en cada extremo (12, 14) del cable (11) , que consiste en dos o más poleas (19, 20) , donde al
menos una polea (19) de cada equipo (17, 18) se puede acoplar al vehículo remolcado (3) , de ahora en adelante denominada la polea fija (19) , y al menos una polea (20) de cada equipo (17, 18) se encuentra sobre la biela (9) , de ahora en adelante denominada la polea móvil (20) , y donde una parte (21) del cable (11) entre cada extremo (12, 14) y la parte inter y acente (16) del cable (11) es guiada a través de las poleas (17, 18) del equipo en cuestión (17, 18) .
2. Mecanismo de dirección (1) según la reivindicación 1, caracterizado por el hecho de que el equipo (17, 18) de cada extremo (12, 14) del cable (11) consiste en una polea móvil (20) y una polea fija (19) , donde las poleas fijas (19) están situadas en cada lado delsoporte giratorio (5) y las poleasmóviles (20) se encuentran en la biela (9) entre el extremo (12, 14) en cuestión del cable (11) y el eje vertical (10) de la biela (9) , y donde el cable (11) es guiado desde un extremo (12, 14) a través de la polea fija (19) hacia ese extremo (12, 14) y luego alrededor de la polea móvil (20) de este extremo (12, 14) alsoporte giratorio (5) .
3. Mecanismo de dirección (1) según la reivindicación 1 o 2, caracterizado por el hecho de que tiene medios de acoplamiento (22) para transmitir una rotación de la biela (9) a una rotación de uno o varios ejes giratorios dirigidos (2) .
4. Mecanismo de dirección (1) según la reivindicación 4, caracterizado por el hecho de que los medios de acoplamiento ya mencionados (22) consisten al menos parcialmente en un acoplamiento mecánico directo desde el control hasta un eje giratorio dirigido (2) por un par de cables (23) o cadenas, una barra o barras que se fijan cada una en un extremo (24) a la biela (9) y en el otro extremo (25) al eje giratorio dirigido en cuestión (2) .
5. Mecanismo de dirección (1) según la reivindicación 3 o 4, caracterizado por el hecho de que los medios de acoplamiento ya mencionados (22) son al menos parcialmente medios de acoplamiento hidráulicos (22) que consisten al menos en:
â?¢ un cilindro de doble efecto de transmisión (28) que está montado entre la biela (9) y el vehículo remolcado (3) .
â?¢ un cilindro de doble efecto conducido (29) conducido por el cilindro de doble efecto de transmisión (28) ya mencionado que está montado entre un eje giratorio dirigido (2) y el vehículo remolcado (3) .
â?¢ una tubería hidráulica (35) entre una primera cámara (33) del cilindro de doble efecto de transmisión (28) y una primera cámara (33) del cilindro de doble efecto conducido (29) ; y,
â?¢ una tubería hidráulica (36) entre una segunda cámara (34) del cilindro de doble efecto de transmisión (28) y una
segunda cámara (34) del cilindro de doble efecto conducido (29) .
6. Mecanismo de dirección (1) según la reivindicación 5, caracterizado por el hecho de que hay varios ejes giratorios dirigidos (2) que se acoplan a la biela (9) por medios de acoplamiento hidráulicos (22) , donde estos ejes giratorios dirigidos (2) tienen un cilindro de doble efecto conducido (29) ya mencionado entre el eje (2) en cuestión y el vehículo remolcado (3) , y donde cada cilindro de doble efecto conducido (29) ya mencionado es conducido a través de tuberías hidráulicas (35, 36) por un cilindro de doble efecto de transmisión (28) correspondiente fijado entre la biela (9) y el vehículo remolcado (3) .
7. Mecanismo de dirección (1) según una de las reivindicaciones 3 a 6, caracterizado por el hecho de que los medios de acoplamiento (22) consisten al menos parcialmente en un mecanismo de acoplamiento hacia adelante, de manera que una rotación de la biela (9) en una dirección determinada causa que uno o varios ejes giratorios dirigidos (2) sufran una rotación en la misma dirección.
8.Mecanismo de direcciónsegún unadelasreivindicaciones3 a7, caracterizado por el hecho de que los medios de acoplamiento (22) tienen un mecanismo inverso de manera que cuando la biela (9) rota en una dirección determinada, uno o varios ejes giratorios dirigidos (2) sufren una rotación en dirección opuesta a la dirección de 12
rotación ya mencionada de la biela (9) .
9. Mecanismo de dirección (1) según las reivindicaciones 5 y 7, caracterizado por el hecho de que el mecanismo de acoplamiento hacia adelante consiste en las tuberías hidráulicas (35, 36) entre un cilindro de doble efecto de transmisión (28) y un cilindro de doble efecto conducido (29) que están conectados a las cámaras en cuestión (33, 34) , y el cilindro de doble efecto de transmisión (28) y cilindro de doble efecto conducido (29) están posicionados de manera que una rotación de la biela (9) produce una rotación del eje (2) en la misma dirección.
10.Mecanismodedirección (1) según las reivindicaciones5 y8, caracterizado por el hecho de que el mecanismo inverso consiste en tuberías hidráulicas (35, 36) entre un cilindro de doble efecto de transmisión (28) y cilindro de doble efecto conducido (29) que están conectados a las cámaras en cuestión (33, 34) y el cilindro de doble efecto de transmisión (28) y cilindro de doble efecto conducido (29) están situados de manera que una rotación de la biela (9) resulta en una rotación del eje (2) en la dirección opuesta.
11. Mecanismo de dirección (1) según la reivindicación 8, caracterizado por el hecho de que los medios de acoplamiento (22) estánalmenos parcialmente formadosporun parde cables (23) yporque elmecanismoinverso ya mencionado contiene al menos dos haces de cable (27) para guiar ambos cables (23) , y de manera que los cables (23) están mutuamente cruzados.
12.Mecanismodedirección (1) según las reivindicaciones7 y8, caracterizado por el hecho de que el mecanismo de dirección (1) tiene un par de bielas (9, 37) , más específicamente una primera biela (9) que se acopla al soporte giratorio (5) mediante un cable (11) y que forma parte del mecanismo hacia adelante y una segunda biela (37) que forma parte del mecanismo inverso, donde el movimiento de la segunda biela (37) se acopla al movimiento de la primera biela (9) mediante un mecanismo inverso de manera que con una rotación de la primera biela (9) en una dirección determinada, la segunda biela (37) sufre una rotación en la dirección opuesta.
13. Mecanismo de dirección (1) según la reivindicación 12, caracterizado por el hecho de que el mecanismo inversoconel cuallaprimera biela (9) se acopla a la segunda biela (37) está formadoporuna transmisión derueda dentada (38) entre la primera biela (9) y la segunda biela (37) .
14. Mecanismo de dirección (1) según la reivindicación 12, caracterizado por el hecho de que el mecanismo inverso con el cual la primera biela (9) se acopla a la segunda biela (37) está formado por una clavija (39) que está provista en una de las bielas (37) y que encaja con una ranura o agujero (40) provisto en la otra biela (9) .
15. Mecanismo de dirección (1) según una de las reivindicaciones anteriormente mencionadas, caracterizado por el hecho de que tiene varios ejes dirigidos (2, 41) , donde algunos de estos ejes dirigidos (2) son dirigidos directamente a través de medios de acoplamiento (22) entre el eje en cuestión (2) y el control (8) del mecanismo de dirección (1) , mientras la parte restante de los ejes (41) es dirigida indirectamente por un acoplamiento adicional (42) desde el eje dirigido indirectamente en cuestión (41) a un eje dirigido directamente (2) .
16. Mecanismo de dirección (1) según la reivindicación 15, caracterizado por el hecho de que un acoplamiento adicional ya mencionado consiste en dos barras (42) que cada una tiene un primer extremo acoplado a un eje dirigido directamente (2) y un segundo extremo a un eje dirigido indirectamente (41) .
17. Mecanismo de dirección (1) según la reivindicación 16, caracterizado por el hecho de que la distancia mutua
(A) entre los primeros extremos de las dos barras difiere de la distancia mutua (B) entre los segundos extremos de las dos barras (42) .
18. Mecanismo de dirección (1) según una de las reivindicaciones anteriormente mencionadas, caracterizado por el hecho de que está al menos parcialmente construido como un paquete o cartucho para el montaje en un vehículo remolcado (3) y con este fin tiene un alojamiento (43) donde se encuentra al menos el soporte giratorio (5) y el control (8) , al igual que los equipos (17, 18) .
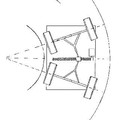
19. Mecanismo de dirección (1) según una de las reivindicaciones anteriormente mencionadas para la dirección de un vehículo tirado con varios ejes dirigidos, caracterizado por el hecho de que el mecanismo de dirección es de manera que cuando se efectúa un giro los ejes dirigidos son dirigidos de manera que los ejes geométricos de las ruedas de los ejes dirigidos intersecan el uno con el otro en un punto o aproximadamente en un punto.
20. Mecanismo de dirección (1) según la reivindicación 19 para la dirección de un vehículo remolcado con varios ejes dirigidos y al menos un eje fijo, caracterizado por el hecho de que el mecanismo de dirección es de manera que cuando se efectúa un giro los ejes dirigidos son dirigidos de manera que los ejes geométricos de las ruedas de los ejes dirigidos intersecan el uno con el otro en un punto o aproximadamente en un punto que se localiza en el eje geométrico de almenos un eje fijo.
21. Mecanismo de dirección (1) según la reivindicación 19 o 20, caracterizado por el hecho de que el mecanismo de dirección esdemanera que cuando seefectúa un giro, el punto ya mencionado se localiza en un eje geométrico
de un eje rígido de la unidad tractora.
22. Mecanismo de dirección (1) según una de las reivindicaciones 19 a 21, caracterizado por el hecho de que el mecanismo de dirección es de manera que cuando se efectúa un giro el punto ya mencionado coincide o coincide aproximadamente con la intersección de los ejes geométricos de las ruedas dirigidas de la unidad tractora.
Patentes similares o relacionadas:
Eje auxiliar para semirremolques, del 26 de Noviembre de 2014, de Fliegl, Helmut: Eje auxiliar para semirremolques con: - un bastidor que determina una dirección longitudinal (LA) del eje auxiliar para semirremolques ; y - […]
 Tren de vehículos de transporte de funcionamiento reversible, del 22 de Enero de 2014, de Metalliance: Tren de vehículos de transporte para túnel que comprende por lo menos dos vehículos ,comprendiendo cada vehículo un chasis globalmente longitudinal […]
Tren de vehículos de transporte de funcionamiento reversible, del 22 de Enero de 2014, de Metalliance: Tren de vehículos de transporte para túnel que comprende por lo menos dos vehículos ,comprendiendo cada vehículo un chasis globalmente longitudinal […]
 Sistema de dirección para uso de vehículos en carriles angostos, del 20 de Marzo de 2013, de VAN SOEST, Pieter Adriaan Laurens: Sistema de dirección para servicio de vehículos que ofrece la posibilidad de ir hacia delante y hacia atrás en carriles angostos y es capaz de […]
Sistema de dirección para uso de vehículos en carriles angostos, del 20 de Marzo de 2013, de VAN SOEST, Pieter Adriaan Laurens: Sistema de dirección para servicio de vehículos que ofrece la posibilidad de ir hacia delante y hacia atrás en carriles angostos y es capaz de […]
CARRETON AUTODIRIGIDO, PARA TRANSPORTAR GRANDES CARGAS AUTOPORTANTES., del 16 de Agosto de 2005, de INDUSTRIAS LANEKO, S.A.L.: Carretón autodirigido, para transportar grandes cargas autoportantes, que consta de un bastidor con una placa superior en la que apoya la carga un eje delantero […]
UNION CON CORRECTOR ANGULAR ENTRE DOS MODULOS DE VEHICULOS DE CALZADAUNIDOS ENTRE SI POR UN MODULO INTERMEDIO AUTOPORTANTE., del 16 de Diciembre de 1998, de LOHR INDUSTRIE: LA CONEXION CON CORRECTOR ANGULAR ESTA PREVISTA PARA DOS MODULOS DE CARRETERA DELANTERO (A) Y TRASERO (B) CONECTADOS ENTRE SI POR UN MODULO INTERMEDIO (C) […]
CARRETON AUTODIRIGIDO., del 16 de Mayo de 1998, de INDUSTRIAS LANEKO, S.A.L.: CARRETON AUTODIRIGIDO. HA SIDO DISEÑADO PARA EL APOYO POSTERIOR DE UNA CARGA DE GRAN LONGITUD, TAL COMO UNA VIGA, APOYADA POR SUS EXTREMOS SOBRE UN CAMION TRACTOR […]
VEHICULO PROVISTO CON UN EJE RIGIDO CONTROLABLE., del 1 de Noviembre de 1994, de GINAF TRUCKS B.V.: UN VEHICULO TIENE UN EJE RIGIDO 1 MONTADO EN MEDIOS DE COJINETES 2, CUYO EJE RIGIDO 1 TIENE EXTREMOS CONECTADOS A ELEMENTOS DE FUERZA DE REACCION CON LONGITUD AJUSTABLE […]
COCHE PROVISTO DE UN ESTABILIZADOR DE TORSIÓN, del 29 de Agosto de 2011, de VERDONSCHOT, HENDRICUS G. M: Un carruaje que comprende un bastidor así como dos ruedas delanteras y traseras las cuales están sostenidas en cojinetes en o sobre porta […]