Dispositivo y método para la detección de obstáculos aéreos para invidentes.
Método para la detección de obstáculos aéreos para invidentes en un dispositivo electrónico portátil que comprende una doble cámara con capacidad de filmado en estéreo;
donde dicho método comprende una etapa de obtención de datos 3D mediante visión estéreo, una etapa de establecimiento de un histograma de distancias a través de los datos 3D, y una etapa de detección de obstáculos a partir del histograma de distancias.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201201247.
Solicitante: UNIVERSIDAD DE ALICANTE.
Nacionalidad solicitante: España.
Inventor/es: SÁEZ MARTÍNEZ,Juan Manuel, ESCOLANO RUÍZ,Francisco, LOZANO ORTEGA,Miguel Ángel, PITA LOZANO,Javier.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06T1/00 FISICA. › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Tratamiento de datos de imagen, de aplicación general.
Fragmento de la descripción:
DISPOSITIVO Y MÉTODO PARA LA DETECCiÓN DE OBSTÃ?CULOS AÉREOS PARA INVIDENTES
Objeto de la invención El objeto de la presente invención es un sistema y un método para la detección de obstáculos aéreos para invidentes como complemento no sustitutivo del bastón o del perro guía. Por obstáculos aéreos se entienden todos aquellos obstáculos que no tienen proyección contra el suelo, tal como ramas de árboles, toldos y similares.
Estado de la técnica La ceguera es considerada la mayor de las minusvalfas sensoriales, ya que se estima que el 80% de la información sensorial humana proviene de la visión. Esta carencia de información condiciona en gran medida la vida del individuo, su interacción con el entorno y con la sociedad, su aprendizaje, etc. Según datos de la Organización Mundial de la Salud en su informe publicado en enero de 2012 {S.P. Mariotti, "Global dala on visual impairments 2010': World Health Organization, Januray 2012) en 2010 se contabilizaron 285 millones de personas con discapacidad visual. Dicho dato abarca todos los grados de discapacidad visual, siendo el grado más severo el que comúnmente se denomina ceguera y que formalmente se atribuye a las personas con una agudeza visual inferior al 5%. Estos últimos representan alrededor del 13, 6% de los discapacitados visuales (unos 39 millones de personas a nivel mundial) .
Uno de los retos diarios a los que se enfrenta una persona ciega es el del desplazamiento autónomo. En cuanto a la orientación global, existen diferentes sistemas basados en GPS con cartografías específicas para peatones y adaptados para ciegos mediante interfaces de voz, que suplen en gran medida este problema. Es el caso de conocido sistema KAPTEN®, desarrollado por la empresa Kapsys, cuyo uso está ampliamente extendido entre la comunidad de ciegos.
Sin embargo, en cuanto a la detección y evitación de obstáculos, son los sistemas clásicos como el bastón o el perro guía los más utilizados. Aunque existen desarrollos tecnológicos y prototipos más avanzados en este terreno (por ejemplo, el documento US6671226 o el US2008309913 que emplea un sistema de radar tridimensional) , no han conseguido hasta el momento convertirse en una herramienta cotidiana para esta comunidad. Esto se debe a varias razones. En primer lugar, porque tienden a intentar
ES 2 478 091 Al
5 sustituir al bastón o al perro guía, sistemas que pese a ser clásicos, cumplen sobradamente su cometido. Por otro lado, y no menos importante, se trata de sistemas bastante voluminosos y bastante incómodos, como grandes cascos con cámaras, sonares repartidos por todo el cuerpo, unidades de cómputo voluminosas, entre otros, que llaman mucho la atención y dificultan en gran medida la integración social a los usuarios.
10 Además, en muchas ocasiones se tiende a traducir los obstáculos en señales acústicas que se envían al usuario a través de auriculares. lo cual le priva del sonido, su principal fuente de información.
Explicación de la invención
15 20 Es un objeto de la presente invención un dispositivo que actúe como complemento no sustitutivo del bastón o del perro guía que viene a resolver el principal problema de estos sistemas, esto es, la incapacidad para detectar obstáculos aéreos. Estos obstáculos se caracterizan por no tener proyección contra el suelo (típicamente ramas de árboles, toldos, etc.) . En el caso de los bastones, la limitación citada es obvia. En el caso de los perros guía, la capacidad de estos animales impide su adiestramiento para detectar este tipo de obstáculos, ya que no son conscientes de la diferencia de altura entre ellos mismos y el humano al que guían.
2S 30 Una ventaja de la presente invención es su integración en un teléfono inteligente (Smartphone) , sin ningún tipo de hardware adicional, por lo que resuHa cómodo y discreto para el usuario, facilitando su integración social. Por otro lado, la invención es capaz de avisar de los obstáculos mediante señales acústicas (a través del altavoz del teléfono, nunca a través de auriculares) o vibraciones, utilizando el sistema de vibración propio del teléfono. Esta última opción hace que el sistema sea aún más discreto, ya que sólo el usuario percibe el aviso y no priva al usuario de la audición, sentido principal para un ciego.
3S Para la detección de obstáculos, la invención es capaz de tomar medidas del entorno a varios metros. Esto no es posible con el hardware que integran la mayoria de los teléfonos inteligentes, pero si con la doble cámara que incorporan algunos modelos denominados ~teléfonos 3D". Estos terminales incorporan una doble cámara trasera con el fin de filmar la escena en estéreo, para lo cual necesitan dos objetivos. La razón por la que los fabricantes incorporan esta opción tan singular en sus dispositivos es
para recrear un efecto denominado ~3D sin gafas", esto es, la visualización de la
escena estéreo a través de una pantalla basada en parallex-barrier, lo que provoca la
ilusión óptica similar a la visualización de la escena en tres dimensiones. El dispositivo
de la invención es aplicable en cualquier dispositivo con doble cámara trasera.
S Dispositivos comerciales de este tipo son el LG Optimus 300 y el HTC Evo 300. No
obstante, la presente invención no está restringida a los teléfonos 3D con dos
cámaras, ya que cualquier teléfono con una sola cámara puede adaptarse con un
sistema catadióptrico basado en espejos para dividir la señal de imagen y obtener así
dos observaciones del entorno separadas.
10
Además de la doble cámara, el sistema utiliza algunos sensores comunes en este tipo
de dispositivos, como es el magnetómetro y el acelerómetro, para detectar la
orientación global del dispositivo y estimar con ella la dirección en la que se mueve el
usuario.
15
La presente invención resuelve la problemática descrita mediante el método descrito
en la primera reivindicación. Otros aspectos de la invención están descritos en el juego
de reivindicaciones que acompaña a la presente memoria descriptiva.
20 A lo largo de la descripción y las reivindicaciones la palabra "comprende" y sus
variantes no pretenden excluir otras características técnicas, aditivos, componentes o
pasos. Para los expertos en la materia, otros objetos, ventajas y características de la
invención se desprenderán en parte de la descripción y en parte de la práctica de la
invención. Los siguientes ejemplos y dibujos se proporcionan a modo de ilustración, y
25 no se pretende que restrinjan la presente invención. Además, la presente invención
cubre todas las posibles combinaciones de realizaciones particulares y preferidas aquí
indicadas.
Breve descripción de las figuras
30
A continuación se pasa a describir de manera muy breve una serie de dibujos que
ayudan a comprender mejor la invención y que se relacionan expresamente con una
realización de dicha invención que se presenta como un ejemplo no limitativo de ésta.
35 FIG.1 Muestra un esquema geométrico del método de detección de obstáculos de
acuerdo con la presente invención.
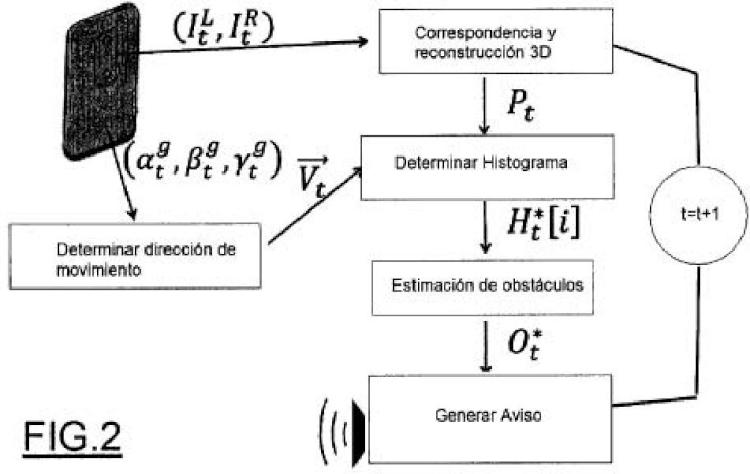
FIG.2 Muestra un diagrama de bloques del método de detección de obstáculos de acuerdo con la presente invención.
Exposición detallada de una realización de la invención El funcionamiento del dispositivo que implementa el método objeto de la presente invención está relacionado directamente con su portabilidad por parte del usuario, ya que el dispositivo debe colgarse del cuello, con la cámara mirando hacia delante y la pantalla del dispositivo apoyada contra el pecho para activar el método de detección de obstáculos. Una vez se detecte mediante el sensor de proximidad del dispositivo que se ha colocado en dicha posición, el dispositivo queda bloqueado y comienza la detección de obstáculos. La detección se desactivará girando el dispositivo, º simplemente separándolo del pecho.
La detección de obstáculos se realizará hasta una distancia de cuatro metros en la dirección de avance del usuario, teniendo en cuenta el espacio que ocupa su torso, estimándose un volumen de O, 5xO, 5x4, O metros. El dispositivo incorpora un algoritmo para corregir el movimiento de basculación producido al caminar, que produce que la cámara no esté mirando siempre en la dirección real de avance, sino que girará continuamente de izquierda a derecha. Con esta corrección, los obstáculos se buscarán en la dirección en la que estamos avanzando, y no hacia donde mira la cámara en cada momento.
Los obstáculos se avisan cuando están a dos metros de distancia en la dirección de avance del usuario. Una vez se encuentre un obstáculo, el sistema avisará mediante vibración...
Reivindicaciones:
1, Método para la detección de obstáculos aéreos para invidentes en un dispositivo electrónico portátil que comprende una doble cámara con capacidad de filmado en estéreo; donde dicho método comprende una etapa de obtención de datos 3D mediante visión estéreo a partir de un par de imágenes y que se caracteriza porque comprende:
(a) una etapa de establecimiento de un histograma de distancias a través de los datos 3D y que consiste en
a. estimar la dirección real del movimiento del usuario a partir del ángulo formado por el dispositivo en el eje horizontal y del ángulo del dispositivo sobre el eje vertical;
b. recoger el subconjunto de puntos 3D obtenidos de la observación actual que se encuentran en la dirección de movimiento del usuario y que intersectan con la proyección del torso del usuario definido como un paralepípedo; y donde el subconjunto de puntos 3D está definido como una nube de puntos distribuida a lo largo de dicho paralepípedo;
c. establecer un histograma de tal forma que se divide el paralelepípedo en sectores y se recoge el número de puntos de cada sector en el histograma, de tal forma que dicho histograma representa una distribución unidimensional de los obstáculos en la dirección de avance del usuario;
d. linearizar el histograma formando un cuadrado unitario por cada celda del histograma situado a la misma distancia a la que se encuentra dicha celda del origen y midiendo el área de cada cuadrado proyectado sobre una imagen de referencia y dividiendo el histograma por dicha imagen de referencia;
(b) una etapa de detección de obstáculos, representados estos por una o varias celdas próximas en el histograma linearizado, y generando un aviso al usuario en forma de señal acústica o vibración, si la distancia al obstáculo identificado es igualo menor a dos metros.
2. Método de acuerdo con la reivindicación 1 donde para detectar las distintas distribuciones que componen el histograma linearizado se emplea un algoritmo Mean -Shift con un núcleo uniforme de cuatro unidades, de tal forma que Del conjunto de centros obtenidos con este procedimiento se tienen en cuenta s610 los más significativo y que representan los posibles obstáculos.
3. Método de acuerdo con cualquiera de las reivindicaciones 1 y 2 donde Para obtener un subconjunto robusto de obstáculos se realiza un procedimiento de seguimiento, de forma que solamente se considera un obstáculo cuando se repita a lo largo del tiempo en al menos las cuatro iteraciones anteriores, seleccionando el
obstáculo con menor índice del conjunto y que representa el más cercano al usuario, de tal forma que si su distancia asociada es inferior a dos metros se genera el aviso.
4. Método de acuerdo con cualquiera de las reivindicaciones 1 a 3 donde el paralepípedo es de O, 5xO, 5x4, O metros.
5. Dispositivo para la detección de obstáculos aéreos para invidentes que se caracteriza porque comprende una doble cámara con capacidad de filmado en estéreo y/o con un sistema catadióptrico basado en espejos para dividir la señal de imagen y obtener así dos observaciones del entorno separadas; y que se caracteriza porque comprende medios para el procesamiento y ejecución del método de las reivindicaciones 1 a 4.
6. Producto informático para la detección de obstáculos aéreos para invidentes que se caracteriza porque comprende una pluralidad de instrucciones conteniendo el método de las reivindicaciones 1 a 4 para su ejecución por un teléfono móvil.
Patentes similares o relacionadas:
MÉTODO DE DETECCIÓN DE LÍNEAS DE TRANSMISIÓN DE ENERGÍA EN TIEMPO REAL CON VEHÍCULOS AÉREOS NO TRIPULADOS, del 25 de Junio de 2020, de PONTIFICIA UNIVERSIDAD JAVERIANA: La presente invención se refiere a un método para realizar la detección de líneas de transmisión de energía en una imagen capturada mediante una cámara […]
CONFIGURACIÓN Y VISUALIZACIÓN DE UNA INTERFAZ DE USUARIO CON ESTUDIOS DE ATENCIÓN SANITARIA, del 22 de Mayo de 2020, de FUJIFILM MEDICAL SYSTEMS USA INC: Configuración y visualización de una interfaz de usuario con estudios de atención sanitaria. Método y aparato para configurar y visualizar una interfaz de […]
Dispositivo y procedimiento de generación de imágenes de guía utilizando parámetros, del 13 de Mayo de 2020, de CJ CGV Co., Ltd: Un dispositivo de generación de imágenes de guía que comprende: una unidad de generación de imágenes de guía configurada para generar una imagen […]
Procedimiento y sistema para la calibración de un sistema de visión por ordenador, del 1 de Abril de 2020, de Oy Mapvision Ltd: Procedimiento para la calibración de un sistema de visión por ordenador tridimensional, comprendiendo dicho procedimiento las etapas de: disponer […]
Marcado remoto de pasaporte y documento de seguridad, del 29 de Enero de 2020, de SICPA HOLDING SA: Un sistema para marcar remotamente un documento de seguridad, tal como un pasaporte , con un correspondiente sello, etiqueta o visado virtual, que comprende: - una […]
Sistema y método de orientación automatizada para una máquina de movimientos coordinados, del 8 de Enero de 2020, de Recognition Robotics, Inc: Un método de orientación automatizada, que comprende: tomar una imagen inicial de una pluralidad de piezas de trabajo (Wa, Wb, Wc) de forma similar con una cámara […]
Imágenes en línea seguras, del 4 de Diciembre de 2019, de TELEFONAKTIEBOLAGET LM ERICSSON (PUBL): Un dispositivo de generación de imágenes seguras para proteger una imagen , comprendiendo el dispositivo de generación de imágenes seguras: un […]
 Método y aparato para comprobar neumáticos de rueda de vehículo, del 25 de Septiembre de 2019, de NEXION S.p.A: Un método para comprobar los neumáticos en las ruedas de un vehículo que comprende las etapas siguientes:
- cuando el vehículo está […]
Método y aparato para comprobar neumáticos de rueda de vehículo, del 25 de Septiembre de 2019, de NEXION S.p.A: Un método para comprobar los neumáticos en las ruedas de un vehículo que comprende las etapas siguientes:
- cuando el vehículo está […]