Dispositivo de transporte.
Dispositivo de transporte para piezas de trabajo (2), en particular piezas de chapa,
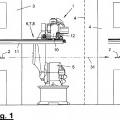
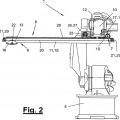
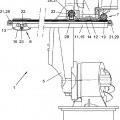
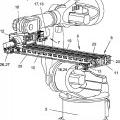
entre depósitos o dispositivos de procesamiento (3, 4) contiguos, en particular prensas, en que el dispositivo de transporte (1) incluye un robot multiaxial (5) con una herramienta asidora (9), en que el dispositivo de transporte (1) incluye un dispositivo de transferencia (6) controlable, guiado por el robot (5), con un dispositivo de avance (7) y con un dispositivo de basculación (8) para la herramienta asidora (9), en que el dispositivo de transferencia (6) incluye un portaherramientas (16), que puede ser movido por traslación y rotación por el dispositivo de avance y el dispositivo de basculación (7, 8) con relación a la mano de robot (10), y en que el dispositivo de transferencia (6) incluye una barra de soporte (11) unida a la mano de robot (10), sobre cuya barra está dispuesto el portaherramientas (16) de forma desplazable, en particular linealmente móvil, y basculante con relación a la barra de soporte (11), caracterizado porque el portaherramientas (16) tiene un eje de basculación (22), que está orientado transversalmente a su dirección de avance y paralelamente a su plano principal contiguo o plano de guía de herramienta de la barra de soporte (11), en particular paralelamente al lado inferior de la barra de soporte (11).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2010/068555.
Solicitante: KUKA SYSTEMS GMBH.
Nacionalidad solicitante: Alemania.
Dirección: BLÜCHERSTRASSE 144 86165 AUGSBURG ALEMANIA.
Inventor/es: CHO,YONG-HAK, HOLECEK,THOMAS, GASTL,MATTHIAS, HENNEKE,THOMAS, MOCKER,SEBASTIAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B21D43/10 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B21 TRABAJO MECANICO DE LOS METALES SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DEL METAL POR PUNZONADO. › B21D TRABAJO MECANICO O TRATAMIENTO DE CHAPAS, TUBOS, BARRAS O PERFILES METALICOS SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DE METALES POR PUNZONADO (trabajo mecánico o tratamiento de alambre B21F). › B21D 43/00 Dispositivos de alimentación, de alineamiento o de almacenado combinados con aparatos para trabajar o tratar la chapa, tubos o perfiles, dispuestos en estos aparatos o especialmente adaptados para ser utilizados en asociación con estos aparatos; Asociación de dispositivos de corte con estos aparatos (dispositivos de corte asociados a las herramientas, ver los grupos previstos para estas herramientas). › por medio de tenazas o pinzas.
- B21D43/11 B21D 43/00 […] › para la alimentación de materias en forma de hojas o bandas.
- B25J18/02 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 18/00 Brazos. › extensibles.
- B25J9/10 B25J […] › B25J 9/00 Manipuladores de control programado. › caracterizado por los medios para regular la posición de los elementos del manipulador.
PDF original: ES-2531440_T3.pdf

Fragmento de la descripción:
Dispositivo de transporte
La invención se refiere a un dispositivo de transporte para piezas de trabajo, en particular piezas de chapa, con las características del preámbulo de la reivindicación principal.
Un dispositivo de transporte de este tipo es conocido a partir del documento JP 26-13518 A. Éste da a conocer un dispositivo de transporte para piezas de chapa entre prensas contiguas. El dispositivo de transporte incluye un robot muItiaxial con una herramienta asidora. El robot guía un dispositivo de transferencia controlable, que contiene un dispositivo de avance y un dispositivo de basculación para la herramienta asidora así como un portaherramientas, que está dispuesto de forma linealmente desplazable y basculante sobre una barra de soporte sujetada por el robot. Él dispositivo de basculación para el portaherramientas tiene aquí un eje de basculación vertical y orientado transversalmente a la barra de soporte. A través de ello, la pieza de chapa asida es girada en su plano principal y movida superando obstáculos en la zona de prensas.
El documento DE 2 27 1 97 U1 muestra otro dispositivo de transporte para piezas de chapa entre prensas contiguas. El dispositivo de transferencia, guiado por un robot, posee un dispositivo de avance, que incluye un carro con la herramienta asidora fijada rígidamente a él, un motor lineal, una placa de base para la fijación a la mano de robot y un acoplamiento de accionamiento entre la platina y el carro. El carro y la herramienta asidora llevan a cabo exclusivamente movimientos relativos lineales respecto a la mano de robot.
El documento JP 8-141969 A muestra un dispositivo de transporte similar para piezas de chapa entre prensas contiguas con un robot multiaxial y con un dispositivo de transferencia guiado por el robot. Este dispositivo tiene un dispositivo de avance que mueve un carro, con la herramienta asidora rígidamente fijada a él, exclusivamente por traslación con relación a la mano de robot.
Otro dispositivo de transporte para piezas de chapa es conocido a partir del documento DE 22 16 13 U1. Está conformado como sistema de transferencia para prensas, con el que las piezas de chapa son transportadas entre prensas de chapa contiguas de una línea de prensas. El dispositivo de transporte incluye un robot multiaxial con una herramienta asidora. La herramienta asidora está dispuesta por el extremo en una pluma unida por brida, de modo solidario en rotación y solidario en desplazamiento, a la mano de robot, y puede ser girada mediante una varilla de empujador en torno a un eje vertical en el extremo de la pluma en caso necesario. El robot puede entrar con la pluma basculante en las prensas y recoger o dejar ahí las piezas de chapa, en que la mano de robot puede permanecer fuera de la prensa. Durante el transporte de piezas de trabajo entre las prensas, la pieza de trabajo puede ser girada en el extremo de la pluma. El robot lleva a cabo durante el transporte de piezas de trabajo movimientos de elevación y movimientos de basculación horizontales y transporta la pieza de trabajo sobre una trayectoria curva.
A partir de la práctica son conocidos otros sistemas de transferencia para prensas, que en el espacio libre entre prensas contiguas incluyen una unidad de transposición dispuesta encima del plano de transporte de piezas de trabajo. Ésta consta de un vehículo impulsor que puede moverse lineal y transversalmente a la línea de prensas con una columna de elevación, en cuyo extremo está dispuesto un carro telescópico de tres piezas que puede desplegarse linealmente por ambos lados, el cual incluye en el último carro telescópico un vehículo de transporte desplazable con un dispositivo basculante para un portaherramientas de una herramienta asidora. Con la columna de elevación en el vehículo impulsor, el carro telescópico puede ser elevado y bajado. La cinemática de este sistema de transferencia para prensas es limitada y condiciona el complicado dispositivo de carro telescópico. Es necesaria por un lado para la consecución de una gran longitud saliente para intervenir dentro de las prensas a ambos lados y por otro lado para la formación de una anchura de carro telescópico pequeña en la posición central retraída para el alojamiento sin obstáculos en el espacio libre entre las prensas.
Constituye por ello la tarea de la presente invención proporcionar una técnica de transporte mejorada para piezas de trabajo.
La invención resuelve esta tarea con las características en la reivindicación principal.
La técnica de transporte reivindicada tiene la ventaja de una alta movilidad y flexibilidad. El dispositivo de transporte puede tener ocho o más ejes, que pueden ser controlables individualmente. A través de ello puede conseguirse una cinemática muy flexible y una adaptación a dispositivos de procesamiento diferentes y a sus condiciones de instalación, en particular a prensas en una línea de prensas. El dispositivo de transporte puede ser aplicado para los dispositivos de procesamiento más diferentes. Puede ser adaptado también de modo sencillo a distancias variables entre dispositivos de procesamiento contiguos. Para ello, es suficiente en la mayoría de los casos una reprogramación del robot.
El dispositivo de transporte altamente flexible puede elevar y bajar las piezas de trabajo y puede transportarlas también sobre una trayectoria arbitraria y en particular ampliamente recta entre los dispositivos de procesamiento.
Esta cinemática rápida y potente es conveniente para la consecución de una elevada velocidad de transporte y de una frecuencia de procesamiento, en particular una frecuencia de prensa, correspondientemente alta. El dispositivo de transporte puede por lo demás también reorientar las piezas de trabajo en caso necesario así como transportarlas dado el caso sobre una trayectoria curva.
El dispositivo de transporte reivindicado tiene además ventajas en lo que respecta al tamaño de montaje. El dispositivo de transferencia puede tener una altura de montaje pequeña, lo que es conveniente sobre todo en las zonas extremas, que intervienen dentro del dispositivo de procesamiento, en particular dentro de una prensa. La anchura de apertura necesaria del dispositivo de procesamiento puede mantenerse pequeña para esta intervención, lo que puede contribuir igualmente a una aceleración de la función de la máquina y a un aumento de la frecuencia de trabajo.
Mediante la movilidad giratoria múltiple en torno a ejes de robot y mediante el dispositivo de basculación, la pieza de trabajo puede girar y bascular de diferentes modos. Esto es conveniente para poder manejar rápida y seguramente también piezas de trabajos conformadas de forma complicada con zonas de pieza de trabajo salientes. En particular, piezas de trabajo de este tipo pueden bascular sobre bordes en el interior de la prensa, durante la extracción e introducción en una prensa de chapas, y pueden ser movidas mediante ello con unas necesidades de anchura de apertura claramente reducidas.
El dispositivo de avance y el de basculación pueden ser incorporados como ejes adicionales en el sistema de control de robot y ser controlados directamente. Esto es conveniente para un movimiento rápido y preciso de la herramienta asidora y de la pieza de trabajo sujetada.
Además de ello, el dispositivo de transporte ofrece una elevada precisión de posicionamiento en torno a varios ejes diferentes. La pieza de trabajo puede ser sujetada y fijada con ello en la posición prefijada durante el transporte y en los procesos de manejo al extraerla de o respectivamente introducirla en un dispositivo de procesamiento. Para el dispositivo de basculación puede ser de ayuda un multiplicador, para poder soportar y parar mejor los momentos de reacción de la pieza de trabajo, pudiendo ser descargado el accionamiento de basculación.
El eje de basculación para el movimiento de la pieza de trabajo puede ser dispuesto en función de las necesidades en el lugar deseado en la zona del dispositivo de transferencia o también separadamente de éste en la zona de la pieza de trabajo. Una situación del eje de basculación junto al dispositivo de transferencia y junto a un carro asociado es conveniente para una reducción de la altura de montaje. La movilidad de basculación, limitada en determinadas circunstancias debido a la proximidad de la barra de soporte, puede ser compensada por los ejes rotatorios del robot.
En conjunto, el dispositivo de transporte reivindicado ofrece una alta eficiencia y rentabilidad en conexión con una cinemática optimizada.
En las reivindicaciones subordinadas están indicadas otras estructuraciones ventajosas de la invención.
La invención es representada a modo de ejemplo y esquemáticamente en los dibujos.... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de transporte para piezas de trabajo (2), en particular piezas de chapa, entre depósitos o dispositivos de procesamiento (3, 4) contiguos, en particular prensas, en que el dispositivo de transporte (1) incluye un robot multiaxial (5) con una herramienta asidora (9), en que el dispositivo de transporte (1) incluye un dispositivo de transferencia (6) controlable, guiado por el robot (5), con un dispositivo de avance (7) y con un dispositivo de basculación (8) para la herramienta asidora (9), en que el dispositivo de transferencia (6) incluye un portaherramientas (16), que puede ser movido por traslación y rotación por el dispositivo de avance y el dispositivo de basculación (7, 8) con relación a la mano de robot (1), y en que el dispositivo de transferencia (6) incluye una barra de soporte (11) unida a la mano de robot (1), sobre cuya barra está dispuesto el portaherramientas (16) de forma desplazadle, en particular linealmente móvil, y basculante con relación a la barra de soporte (11), caracterizado porque el portaherramientas (16) tiene un eje de basculación (22), que está orientado transversalmente a su dirección de avance y paralelamente a su plano principal contiguo o plano de guía de herramienta de la barra de soporte (11), en particular paralelamente al lado inferior de la barra de soporte (11).
2. Dispositivo de transporte según la reivindicación 1, caracterizado porque el dispositivo de avance (7) y el dispositivo de basculación (8) están conectados al sistema de control del robot y están conformados o controlados como ejes adicionales del robot (5).
3. Dispositivo de transporte según la reivindicación 1 ó 2, caracterizado porque el robot (5) incluye una mano de robot multiaxial (1), en la cual está dispuesto el dispositivo de transferencia (6).
4. Dispositivo de transporte según la reivindicación 1, 2 ó 3, caracterizado porque el dispositivo de avance (7) incluye un carro (12) para la unión con la mano de robot (1) y un carro (13) para el portaherramientas (16), que están dispuestos y guiados de forma longitudinalmente móvil sobre la barra de soporte (11), en que los carros (12, 13) están soportados de forma desplazable sobre diferentes lados de la barra de soporte (11), en particular sobre su lado superior e inferior, en guías de carriles (14).
5. Dispositivo de transporte según una de las reivindicaciones precedentes, caracterizado porque la barra de soporte (11) está sujeta de forma móvil, en particular desplazable, con relación a la mano de robot (1), en que la barra de soporte (11) está sujeta de tal modo por el robot (5) que el movimiento de avance está orientado a lo largo de la línea de unión (31) entre los dispositivos de procesamiento (3, 4) y de forma esencialmente horizontal, en que el eje de basculación (22) del movimiento de basculación está orientado transversalmente al movimiento de avance y de forma esencialmente horizontal.
6. Dispositivo de transporte según una de las reivindicaciones precedentes, caracterizado porque el dispositivo de avance (7) y el dispositivo de basculación (8) incluyen accionamientos controlables (17, 26), preferentemente con servomotores eléctricos.
7. Dispositivo de transporte según la reivindicación 6, caracterizado porque el accionamiento de avance (17) y el accionamiento de basculación (26) están dispuestos en la mano de robot (1) o en el carro (12) asociado.
8. Dispositivo de transporte según la reivindicación 6 ó 7, caracterizado porque el accionamiento de avance (17) y el accionamiento de basculación (26) están dispuestos, visto en la dirección transversal de la barra de soporte (11), de forma opuesta entre sí y a ambos lados del carro (12).
9. Dispositivo de transporte según la reivindicación 6, 7 u 8, caracterizado porque el accionamiento de avance (17) está unido a la barra de soporte (11) a través de un medio de transmisión (19), en particular una transmisión de cremallera o de correa.
1. Dispositivo de transporte según una de las reivindicaciones 4 a 9, caracterizado porque el eje de basculación (22) está situado en la zona de la barra de soporte (11) o en la zona del carro (13) o con separación en la zona de la pieza de trabajo (2).
11. Dispositivo de transporte según una de las reivindicaciones 4 a 1, caracterizado porque los carros (12, 13) están unidos por un dispositivo de acoplamiento circundante (2) para la transmisión de movimiento.
12. Dispositivo de transporte según una de las reivindicaciones 4 a 1, caracterizado porque el portaherramientas (16) está soportado, de forma giratoria en torno a un eje de basculación (22), en el carro (13) asociado, y está unido al accionamiento de basculación (26) por un medio de transmisión (28) circundante.
13. Dispositivo de transporte según la reivindicación 1 y 11, caracterizado porque los medios de acoplamiento y transmisión (2, 28) circundantes están guiados en un bucle finito o sin fin en torno a elementos de desvío (21, 29) en ambos extremos de la barra de soporte (11).
14. Dispositivo de transporte según una de las reivindicaciones precedentes, caracterizado porque un dispositivo de basculación (8) incluye un medio de transmisión (28) accionado y una rueda de accionamiento (33), unida al medio de forma complementaria en rotación, con un husillo (34), en que el husillo (34) está unido a un cuerpo giratorio (23) a modo de husillo a través de un yugo (35) engranado y axialmente móvil con tuercas de husillo, y
acciona este cuerpo de forma giratoria.
15. Dispositivo de transporte según una de las reivindicaciones precedentes, caracterizado porque la barra de soporte (11) incluye una estructura de soporte (15) en forma de celosía o en forma de un alojamiento a modo de caja con perforaciones para ahorrar peso.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 13 de Mayo de 2020, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; un segundo eslabón acoplado […]
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Robot de instalación de revestimiento, en particular robot de manipulación, del 4 de Septiembre de 2019, de Dürr Systems AG: Robot de instalación de revestimiento, en particular como robot de manipulación para abrir o cerrar una carrocería de vehículo automóvil […]
Tubo hinchable de geometría variable y volumen constante, brazo robotizado y robot, del 22 de Mayo de 2019, de Warein: Tubo hinchable de geometría variable y volumen constante, comprendiendo una envoltura hinchable de material flexible impermeable y poseyendo […]
Dispositivo para el posicionamiento tridimensional de un componente de acoplamiento y sistema de actuadores, del 27 de Marzo de 2019, de AIRBUS HELICOPTERS DEUTSCHLAND GmbH: Dispositivo para el posicionamiento tridimensional de un componente (KK) de acoplamiento que es parte de una estructura (KS) de acoplamiento accionada […]
Seguridad de un robot de carácter humanoide, del 3 de Diciembre de 2018, de Softbank Robotics Europe: Robot de carácter humanoide (10; 10') que comprende dos elementos y una articulación de al menos un grado de libertad que une […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 23 de Noviembre de 2018, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; […]