Dispositivo de agarre para el posicionamiento, la fijación, la modificación de posición y/o el cambio de herramientas sobre una superficie de montaje.
Dispositivo de agarre (1) para el posicionamiento, la fijación,
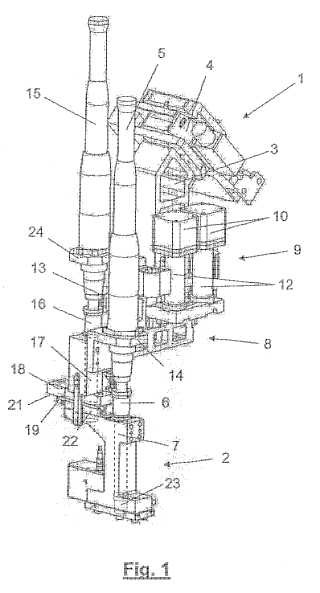
la modificación de posición y/o el cambio deherramientas (2) sobre una superficie de montaje, que es fijable a una disposición de manejo y posee al menos dosatornilladores (5, 15) fijados a un brazo de agarre (3) para la unión separable de la herramienta (2) por un lado al brazode agarre (3) y por otro lado a una superficie de montaje, en que los atornilladores (5, 15) activan respectivamente unhusillo roscado (7, 17).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2010/002911.
Solicitante: ThyssenKrupp System Engineering GmbH.
Nacionalidad solicitante: Alemania.
Dirección: WEIPERTSTRASSE 37 74076 HEILBRONN ALEMANIA.
Inventor/es: STEIN,HANS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J15/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Cabezas de aprehensión.
- B25J15/04 B25J […] › B25J 15/00 Cabezas de aprehensión. › con posibilidad para el levantamiento o el cambio a distancia de la cabeza o de partes de ésta.
PDF original: ES-2423603_T3.pdf
Fragmento de la descripción:
Dispositivo de agarre para el posicionamiento, la fijación, la modificación de posición y/o el cambio de herramientas sobre una superficie de montaje La invención se refiere a un dispositivo de agarre para el posicionamiento, la fijación, la modificación de posición y/o el 5 cambio de herramientas sobre una superficie de montaje.
En el documento DE 20 2006 005 855 U1 encuentran aplicación varias disposiciones de sujeción intercambiables específicas para el tipo en cuestión, que son recibidas por un medio de transporte y pueden ser reemplazadas según las necesidades. La disposición de sujeción tiene interfaces para la unión con un robot de manipulación y con una zona de recepción del medio de transporte. La interfaz es por ejemplo una zona de acoplamiento para la mano del robot y su herramienta intercambiable. Las interfaces sirven aquí para el acoplamiento y el posicionamiento de las disposiciones de sujeción. Por ejemplo, una interfaz en la disposición de sujeción puede constar de dos o más muñones, que engranan en correspondientes interfaces conjugadas conformadas como abertura conjugada en las zonas de recepción del medio de transporte. En caso de un cambio de tipo de las piezas de trabajo/componentes, el robot de manipulación puede cambiar de forma autónoma la disposición de sujeción.
En el documento DE 298 13 669 U1 se describe una estación de trabajo flexible para el tratamiento, en particular para el ensamblaje y la soldadura geométrica de dos o más tipos diferentes de componentes, que consta de al menos un dispositivo de alimentación de componentes, al menos un espacio de tratamiento flexible con varios dispositivos de posicionamiento móviles específicos para el tipo en cuestión, con disposiciones de sujeción así como uno o más dispositivos de tratamiento y al menos un dispositivo de transporte, que transporta los componentes desde el dispositivo de alimentación de componentes a los dispositivos de posicionamiento, en que el dispositivo de transporte tiene varias herramientas de agarre específicas para el tipo en cuestión e intercambiables, para las cuales está (n) prevista (s) de cara al cambio de herramientas una o más bandeja (s) de dispositivos de agarre sobre los componentes, que se encuentran sobre el dispositivo de posicionamiento y/ sobre el dispositivo de alimentación de componentes. Se emplean varios dispositivos de posicionamiento específicos para el tipo en cuestión con disposiciones de sujeción, en que el
dispositivo de transporte tiene varias herramientas de agarre específicas para el tipo en cuestión e intercambiables, para las cuales están previstas de cara al cambio de herramientas una o más bandejas de dispositivos de agarre sobre los componentes. Las herramientas de agarre están conformadas como herramienta superior de la disposición de sujeción y pueden ser unidas a una herramienta inferior en la disposición de posicionamiento. Esta solución es relativamente complicada, siendo desventajoso que las herramientas de agarre sólo puedan emplearse de forma específica para el
tipo en cuestión.
A partir del documento DE 36 36 513 C2 es conocida una disposición de agarre, que acciona una unidad de accionamiento con un motorreductor, que acciona mordazas de agarre intercambiables a través de husillos roscados. Para llevar a cabo procesos de atornillamiento en particular mediante un aparato de manejo, la disposición de agarre puede ser fijada al árbol de salida por tornillos. En este caso, el árbol de salida, situado en el eje de tornillo, del
motorreductor está unido a un engranaje cónico, que mediante los husillos roscados desplaza mordazas de accionamiento en un plano aproximadamente perpendicular al eje de tornillo. Para la transmisión del movimiento de las mordazas de accionamiento a las mordazas de agarre, las mordazas de accionamiento engranan en rebajos en las mordazas de agarre.
A partir del documento US-A-5 281 079 es conocido un dispositivo de agarre para el cambio de herramientas, que es fijable a una disposición de manejo y posee un atornillador fijado a un dispositivo de agarre, cuyo atornillador lleva un husillo roscado.
Es una desventaja de las soluciones previamente citadas que, en caso de desviaciones de posición de las herramientas a cambiar mediante el dispositivo de agarre/robot, su agarre no puede ser garantizado de forma fiable.
Constituye la tarea de la invención desarrollar un dispositivo de agarre, que permita un empleo para herramientas 45 diferentes y garantice una recepción y fijación fiables de las herramientas sobre una superficie de montaje.
Esta tarea es resuelta con las características de la primera reivindicación. Estructuraciones ventajosas resultan de las reivindicaciones subordinadas.
Conforme a la invención se propone un dispositivo de agarre, para el posicionamiento, la fijación, la modificación de posición y/o para el cambio de herramientas sobre una superficie de montaje, que está dispuesto en una disposición de 50 manejo y posee al menos dos atornilladores fijados a un brazo de agarre para la activación de respectivamente un husillo roscado para la unión separable de la herramienta por su lado al brazo de agarre y por otro lado a una superficie de montaje.
La fijación de una herramienta, puesta a disposición preferentemente desde un almacén, sobre una superficie de montaje se produce conforme a la invención mediante el recurso de que la herramienta se mueve, con ayuda de un 55 dispositivo de agarre fijado preferentemente a un manipulador o brazo de robot, hacia la posición de fijación sobre una superficie de montaje y la herramienta es unida a través de una primera interfaz a la superficie de montaje, y el dispositivo de agarre está unido a través de una segunda interfaz a la herramienta. Tras ello, la segunda interfaz puede ser separada y el dispositivo de agarre sin herramienta puede ser retirado.
La primera interfaz está conformada en particular en forma de un primer husillo roscado, dispuesto en el dispositivo de agarre y activable mediante un primer atornillador, con cuyo husillo la herramienta puede ser fijada de forma separable sobre la superficie de montaje. La segunda interfaz está conformada igualmente en forma de un segundo husillo roscado dispuesto en el dispositivo de agarre y activable mediante un segundo atornillador. Con el segundo husillo roscado, la herramienta puede ser unida de forma separable al dispositivo de agarre. El primer husillo roscado es atornillable en este caso en un primer taladro roscado conformado en la superficie de montaje de tal modo que la herramienta es fijable sobre la superficie de montaje al producirse el atornillamiento o mediante el atornillamiento del primer husillo roscado.
El segundo husillo roscado es atornillable en un segundo taladro roscado de la herramienta y la herramienta puede ser sujetada o aplicada, al producirse el atornillamiento o mediante el atornillamiento del segundo husillo roscado, con una segunda superficie de apoyo situada por el lado del dispositivo de agarre contra una superficie de apoyo del dispositivo de agarre. El dispositivo de agarre posee para ello de modo ventajoso un elemento de acoplamiento, en el que está conformada la superficie de apoyo del dispositivo de agarre, en que el segundo husillo roscado es guiado a través de un taladro o abertura a través del elemento de acoplamiento.
El primer husillo roscado es recibido en el dispositivo de agarre por al menos un elemento de soporte, que está soportado de forma móvil y/o flotante ventajosamente para la compensación de desviaciones de posición en un plano rectangular o esencialmente rectangular al eje longitudinal del husillo roscado. Este soporte móvil, desplazable y/o flotante es de modo ventajoso enclavable y desenclavable mecánicamente y está dotado de topes, que están conformados en particular elásticamente, en que los resortes de los topes, soportados elásticamente, del elemento de soporte pueden ser controlados por el lado de fuerza.
En otra forma de realización ventajosa, en el dispositivo de agarre está previsto al menos un elemento de arrastre para el desplazamiento de la herramienta, en que el elemento de arrastre está conformado en particular en el elemento de acoplamiento y tiene una superficie curvada de forma esférica o respectivamente convexa. El dispositivo de agarre puede estar fijado de forma separable a un manipulador o a un brazo de robot. El manipulador puede ser equipado entretanto opcionalmente con el dispositivo de agarre conforme a la invención o con otras disposiciones para llevar a cabo otras tareas de tratamiento.
Las herramientas pueden ser en particular elementos de sujeción y/o elementos para el posicionamiento y/o la fijación de posición de... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de agarre (1) para el posicionamiento, la fijación, la modificación de posición y/o el cambio de herramientas (2) sobre una superficie de montaje, que es fijable a una disposición de manejo y posee al menos dos atornilladores (5, 15) fijados a un brazo de agarre (3) para la unión separable de la herramienta (2) por un lado al brazo de agarre (3) y por otro lado a una superficie de montaje, en que los atornilladores (5, 15) activan respectivamente un husillo roscado (7, 17) .
2. Dispositivo de agarre según la reivindicación 1, caracterizado porque en el brazo de agarre (3) está dispuesto un primer atornillador (5) con un primer husillo roscado (7) , con el cual la herramienta (2) es fijable de forma separable sobre una superficie de montaje, y porque en el brazo de agarre (3) está dispuesto un segundo atornillador (15) con un segundo husillo roscado (17) , con el cual la herramienta (2) es fijable de forma separable al brazo de agarre (3) .
3. Dispositivo de agarre según la reivindicación 1 ó 2, caracterizado porque en la herramienta (2) está dispuesto de forma móvil un elemento de fijación (23) , que es atornillable en un taladro roscado de la superficie de montaje con el primer husillo roscado (7) .
4. Dispositivo de agarre según una de las reivindicaciones 1 hasta 3, caracterizado porque para la unión separable de
la herramienta (2) al brazo de agarre (3) y/o a un elemento de acoplamiento (18) fijado al brazo de agarre (3) el segundo husillo roscado (17) es atornillable en un taladro roscado de la herramienta (2) .
5. Dispositivo de agarre según la reivindicación 4, caracterizado porque para la fijación de la herramienta (2) al elemento de acoplamiento (18) el segundo husillo roscado (17) es guiado a través de un taladro o abertura en el elemento de acoplamiento (18) .
7. Dispositivo de agarre según la reivindicación 6, caracterizado porque el elemento de soporte (8) es enclavable y desenclavable mecánicamente.
9. Dispositivo de agarre según la reivindicación 8, caracterizado porque los topes conformados con resortes (13) son controlables desde el lado de fuerza.
10. Dispositivo de agarre según una de las reivindicaciones 1 hasta 9, caracterizado porque el dispositivo de agarre (1) 30 tiene al menos un elemento de arrastre (19) para el movimiento de la herramienta (2) sobre la superficie de montaje.
11. Dispositivo de agarre según la reivindicación 10, caracterizado porque el elemento de arrastre (19) está dispuesto en el elemento de acoplamiento (18) .
12. Dispositivo de agarre según la reivindicación 10 u 11, caracterizado porque el elemento de arrastre 19 tiene una superficie curvada de forma esférica y/o convexa.
13. Dispositivo de agarre según una de las reivindicaciones 1 hasta 12, caracterizado porque el dispositivo de agarre (1) es fijable de forma separable a un manipulador o brazo de robot.
14. Dispositivo de agarre según una de las reivindicaciones 1 hasta 13, caracterizado porque las herramientas (2) están conformadas como elementos de sujeción y/o como elementos para el posicionamiento y/o la fijación de posición de componentes, en particular de piezas de carrocería, y/o como elementos de detección o medida.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
EXTREMIDAD ROBGTICA, ESLABON DE UNA EXTREMIDAD ROBOTICA Y METODO PARA PROPORCIONAR SOPORTE A UNA EXTREMIDAD ROBOTICA, CON MOVIMIENTO ANTROPOMORFO AJUSTABLE, del 28 de Mayo de 2020, de ORTEGA CARRILLO, Hernando: Extremidad robótíca, Eslabón de una extremidad robótica y Método para proporcionar soport a una extremidad robótica, estando o no energizados, por medio […]
Procedimiento de producción de una pieza, del 13 de Mayo de 2020, de Flex-N-Gate France: Procedimiento de producción de una pieza que incluye, al menos, un elemento de refuerzo fabricado a partir de un inserto fibroso de material […]
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Máquina para llenar y envasar frascos, cartuchos, jeringas y similares, del 1 de Abril de 2020, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Una máquina para llenar y envasar frascos, cartuchos, jeringas y similares, que comprende una pared que separa una cámara operativa en […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
 Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Sistema de laminado automatizado de chapas y método de colocación, del 19 de Febrero de 2020, de THE BOEING COMPANY: Un sistema para la colocación de chapas de compuesto en localizaciones preseleccionadas; que comprende: un robot ; un efector […]