Aparato para transferir recipientes.
Aparato (1) para transferir recipientes que comprende:
- una estructura de soporte (4,
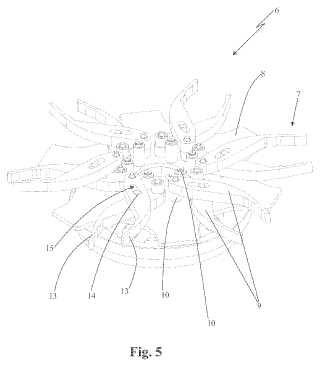
61); - por lo menos un primer eje de accionamiento (5) montado de manera giratoria en dicha estructura de soporte (4, 61), que se extiende a lo largo de un eje vertical (Z) y que puede girar alrededor de dicho eje vertical (Z); - una primera plataforma giratoria (6) fijada centralmente en dicho primer eje (5) para girar alrededor de dicho eje vertical (Z); - una pluralidad de primeras pinzas (7) montadas periféricamente sobre dicha primera plataforma giratoria (6), cada una provista de por lo menos dos primeros brazos (9) que pueden ser accionados por primeros medios de accionamiento (12) para girar alrededor de primeros pivotes diferentes (10) con primeros ejes paralelos (Y, Y') entre por lo menos una primera posición abierta, en la que respectivas primeras zonas de retención (13) de dichos primeros brazos (9) están separadas entre sí para recibir o liberar un recipiente (2), y por lo menos una primera posición cerrada, en la que dichas primeras zonas de retención (13) están juntas entre sí para mantener dicho recipiente (2) entre ellas; caracterizado por el hecho de que: - cada primer brazo (9) de cada una de dichas primeras pinzas (7) está provisto de una ranura (15) alineada con la ranura de por lo menos otro primer brazo (9) de las mismas primeras pinzas (7); - presentando cada primer brazo (9) de cada una de las primeras pinzas (7) un saliente, en un plano horizontal (I), que se cruza con el saliente de por lo menos uno de dicho otro primer brazo (9) de las mismas primeras pinzas (7) en la zona de las citadas ranuras alineadas (15); - estando dichos primeros brazos (9) conectados entre sí por medio de un primer elemento de accionamiento (14) que está acoplado a dichas ranuras alineadas (15) y pueden moverse a través de dichos primeros medios de accionamiento (12) dentro de dichas ranuras alineadas (15) para girar dichos primeros brazos (9) alrededor de dichos primeros pivotes (10) entre dicha primera posición abierta y dicha primera posición cerrada.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09175852.
Solicitante: MBF S.P.A..
Nacionalidad solicitante: Italia.
Dirección: Strada Nuova Padovana, 3/A 37040 Veronella (VR) ITALIA.
Inventor/es: BALZARIN,FRANCO, Boscaro,Giuliano.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G47/84 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › Ruedas con forma de estrellas o dispositivos de correas o cadenas sin fin, estando dotadas las ruedas o dispositivos de elementos que enganchan a los objetos.
PDF original: ES-2379508_T3.pdf
Fragmento de la descripción:
Aparato para transferir recipientes Campo de aplicación [0001] La presente invención se refiere a un aparato para transferir recipientes, en particular botellas o similares, de acuerdo con el preámbulo de la reivindicación principal.
El aparato en cuestión está destinado a utilizarse ventajosamente en plantas industriales de embotellado de bebidas, tales como vino o agua mineral, para transportar los recipientes, de vidrio o de plástico, entre distintas máquinas operativas, tales como máquinas de lavado, de llenado o taponadoras/capsuladoras, o para transportar los recipientes dentro de las mismas máquinas.
Técnica anterior [0003] Tal como es conocido, las plantas embotelladoras industriales que actualmente existen en el mercado suelen utilizar varias máquinas operativas dispuestas en serie para realizar las operaciones de lavado, llenado, taponado/capsulado, etiquetado, etc.
Para ello, las máquinas operativas mencionadas anteriormente incorporan periféricamente, en una plataforma giratoria, una pluralidad de cabezales operativos a los cuales están asociados los recipientes, a lo largo de su recorrido alrededor de la plataforma giratoria, con el fin de someterse a las operaciones que realizan la máquina operativa.
La transferencia de los recipientes entre las distintas máquinas operativas, es decir, alrededor de las mesas giratorias de las citadas máquinas operativas, se realiza utilizando medios de transporte tales como alimentadores de tornillo, ruedas de estrella ranuradas accionadas por motor, pinzas de retención y cintas transportadoras. En el sector hay una necesidad particularmente apremiante de garantizar un funcionamiento versátil de las plantas de embotellado utilizando recipientes de diferentes formas y tamaños. Para ello, los medios de transporte actualmente están adaptados para retener correctamente los recipientes, sustituyendo los alimentadores de tornillo o las pinzas, en particular para centrar los recipientes correctamente respecto a los cabezales de las máquinas operativas. De hecho, si los recipientes varían su posición sobre la base de apoyo de la plataforma giratoria cuando hay una variación de tamaño, es obvio que ya no quedan alineados con los cabezales operativos de las diferentes máquinas.
La adaptación que se requiere cuando se produce un cambio en la producción para utilizar recipientes con una forma diferente, obviamente tiene como resultado una pérdida considerable de tiempo así como tiempos de inactividad en la producción debido a que la planta ha dejado de funcionar, lo cual tiene un efecto negativo sobre la eficacia de la producción global y por lo tanto, los costes.
Con el fin de superar estos inconvenientes se han desarrollado muchos medios de transporte de tipo pinzas capaces de operar con recipientes de tamaños diferentes. Por ejemplo, la patente EP 0366225 describe un aparato para transportar recipientes, equipado con una plataforma giratoria que gira alrededor de un eje central de giro. En dicha plataforma giratoria van montadas periféricamente una pluralidad de pinzas, comprendiendo cada una de estas pinzas un par de brazos que están montados giratorios en un disco de soporte de la plataforma giratoria. El extremo libre de cada brazo está provisto de un saliente para facilitar la sujeción de los recipientes, mientras que el extremo conectado al disco central presenta, encajado en el mismo, una rueda dentada conectada a la rueda dentada del otro brazo de las pinzas. Una barra vertical está conectada en un extremo a uno de los brazos de las pinzas y en el otro extremo a un mecanismo de leva. Este último comprende una leva troncocónica que actúa sobre un seguidor de leva conectado mecánicamente a la barra vertical a través de unos mecanismos de palanca y unos medios elásticos. En términos operativos, la leva provoca un desplazamiento radial del seguidor alejándose o acercándose al eje central, provocando un giro de la barra vertical que, a su vez, provoca la apertura o cierre de los brazos de las pinzas. Este aparato de transporte comprende también un dispositivo de control para regular el ángulo de apertura y cierre de las pinzas con el fin de que estas últimas puedan retener recipientes con una base de diámetro variable. Este dispositivo de control comprende un mecanismo elevador de engranajes que permite bajar o subir la leva troncocónica con el fin de mantener el seguidor de leva más o menos cerca del eje central durante todo el giro de la plataforma giratoria para reducir o aumentar el ángulo máximo de cierre o apertura de las pinzas.
Sin embargo, esta solución en la práctica también tiene una serie de inconvenientes.
Un primer inconveniente consiste en el hecho de que las pinzas de este aparato están destinadas a transportar solamente recipientes de base circular, pero no pueden retener y centrar correctamente recipientes con otras formas que se encuentran comúnmente en el mercado, tales como botellas de base cuadrada, rectangular o triangular.
Otro inconveniente consiste en el hecho de que, no obstante, son necesarias operaciones de ajuste para adaptar las pinzas para que puedan retener recipientes de diferentes diámetros. Estas operaciones requieren detener toda la planta embotelladora con el consiguiente tiempo de inactividad de la producción y una menor eficiencia del proceso de producción.
Además, el ajuste de las pinzas, mediante el dispositivo de control empleado en el aparato de transporte brevemente descrito anteriormente, no resuelve totalmente el problema del desplazamiento radial de los recipientes cuando existe una variación de su forma y tamaño, con el consiguiente riesgo de un desajuste entre la boca de los recipientes y los cabezales de las máquinas operativas.
Otro inconveniente está asociado a la elevada complejidad constructiva del aparato para el transporte de recipientes de tipo conocido, que puede dar lugar a averías o a un mal funcionamiento.
JP 59 0396 14 describe un aparato para transferir recipientes de acuerdo con el preámbulo de la reivindicación 1. Este aparato comprende una pluralidad de pinzas cada una provista de dos brazos de soporte articulados alrededor de un eje de soporte correspondiente. Los brazos de soporte son accionados por una leva entre una posición abierta, con los brazos separados entre sí para recibir o liberar un recipiente, y una posición cerrada, con los brazos cerrados entre sí para sujetar un recipiente entre ellos. Cada brazo de soporte tiene un brazo de conexión. Uno de los brazos de conexión tiene un pivote que se inserta en un orificio formado en el otro brazo de conexión. Además, uno de los brazos de soporte está también fijado rígidamente a un brazo de accionamiento el cual tiene un rodillo montado en el mismo, que se encuentra colocado en contacto con la leva. El aparato según este documento presenta el inconveniente de que tiene complejidad mecánica y no presenta medios de accionamiento simétrico, lo que produce muchas vibraciones en el aparato.
Descripción de la invención [0014] El principal objetivo de la presente invención es, por lo tanto, superar los inconvenientes derivados de las soluciones de tipo conocido consideradas anteriormente disponiendo un aparato para transferir recipientes que permita un uso versátil cuando exista una variación tanto en la forma como en el tamaño de los recipientes, sin necesidad de procedimientos de adaptación laboriosos.
Otro objetivo de la presente invención es disponer un aparato para transferir recipientes que permita mantener los recipientes centrados en sus respectivos asientos en la plataforma giratoria cuando haya una variación de su forma y tamaño.
Otro objetivo de la presente invención es disponer un aparato para transferir recipientes, que sea económico y fácil de fabricar.
Otro objetivo de la presente invención es disponer un aparato para transferir recipientes, que operativamente sea completamente fiable.
Breve descripción de los dibujos [0018] Las características técnicas de la invención, de acuerdo con los objetivos mencionados anteriormente, pueden determinarse claramente por el contenido de las reivindicaciones adjuntas y sus ventajas serán más claras a partir de la siguiente descripción detallada, que se dan con referencia a los dibujos que se acompañan, los cuales ilustran una realización meramente de ejemplo y no limitativa de la misma, en los cuales:
La figura 1 muestra una vista en perspectiva del aparato para transferir recipientes de acuerdo con la invención, asociado a una planta... [Seguir leyendo]
Reivindicaciones:
1. Aparato (1) para transferir recipientes que comprende:
- una estructura de soporte (4, 61) ;
- por lo menos un primer eje de accionamiento (5) montado de manera giratoria en dicha estructura de soporte (4, 61) , que se extiende a lo largo de un eje vertical (Z) y que puede girar alrededor de dicho eje vertical (Z) ;
- una primera plataforma giratoria (6) fijada centralmente en dicho primer eje (5) para girar alrededor de dicho eje vertical (Z) ;
- una pluralidad de primeras pinzas (7) montadas periféricamente sobre dicha primera plataforma giratoria (6) , cada una provista de por lo menos dos primeros brazos (9) que pueden ser accionados por primeros medios de accionamiento (12) para girar alrededor de primeros pivotes diferentes (10) con primeros ejes paralelos (Y, Y') entre por lo menos una primera posición abierta, en la que respectivas primeras zonas de retención (13) de dichos primeros brazos (9) están separadas entre sí para recibir o liberar un recipiente (2) , y por lo menos una primera posición cerrada, en la que dichas primeras zonas de retención (13) están juntas entre sí para mantener dicho recipiente (2) entre ellas; caracterizado por el hecho de que:
- cada primer brazo (9) de cada una de dichas primeras pinzas (7) está provisto de una ranura (15) alineada con la ranura de por lo menos otro primer brazo (9) de las mismas primeras pinzas (7) ;
- presentando cada primer brazo (9) de cada una de las primeras pinzas (7) un saliente, en un plano horizontal (I) , que se cruza con el saliente de por lo menos uno de dicho otro primer brazo (9) de las mismas primeras pinzas (7) en la zona de las citadas ranuras alineadas (15) ;
- estando dichos primeros brazos (9) conectados entre sí por medio de un primer elemento de accionamiento (14) que está acoplado a dichas ranuras alineadas (15) y pueden moverse a través de dichos primeros medios de accionamiento (12) dentro de dichas ranuras alineadas (15) para girar dichos primeros brazos (9) alrededor de dichos primeros pivotes (10) entre dicha primera posición abierta y dicha primera posición cerrada.
2. Aparato (1) para transferir recipientes según la reivindicación 1, caracterizado por el hecho de que las primeras zonas de retención (13) de dichos primeros brazos (9) comprenden:
- por lo menos una primera sección saliente (18) formada en las proximidades de un extremo libre (16) de dichos primeros brazos (9) ,
- por lo menos un segunda sección saliente (19) formada entre dicha primera sección saliente (18) y dicha ranura (15) ,
- definiendo dicha primera (18) y segunda (19) sección saliente entre ellas por lo menos una sección rebajada (20) , en particular plana;
pudiendo recibir y soportar dicha primera (18) y segunda (19) sección saliente y dicha sección rebajada (20) el citado recipiente (2) cuando dichos primeros brazos (9) se encuentran en dicha primera posición cerrada.
3. Aparato (1) para transferir recipientes según la reivindicación 1, caracterizado por el hecho de que cada una de dichas primeras pinzas (7) está provista de tres primeros brazos (9) ; presentando dos de dichos primeros brazos (9) salientes en dicho plano (I) que coinciden sustancialmente entre sí y se cruzan con el saliente del otro primer brazo (9) .
4. Aparato (1) para transferir recipientes según la reivindicación 1, caracterizado por el hecho de que dichos primeros medios de accionamiento (12) comprenden una primera leva (22) que está fijada en dicha estructura de soporte (4, 61) , es coaxial con dicho primer eje (5) y a la cual está acoplado un primer seguidor de leva (23) montado en dicho primer elemento de accionamiento (14) .
5. Aparato (1) para transferir recipientes según la reivindicación 4, caracterizado por el hecho de que comprende primeros medios elásticos (27) capaces de ejercer un empuje radial sobre dicho elemento de accionamiento (14) , presionando dicho primer seguidor de leva (23) contra el perfil de dicha primera leva (22) .
6. Aparato (1) para transferir recipientes según la reivindicación 1, caracterizado por el hecho de que comprende:
- un segundo eje (42) acoplado coaxialmente en el interior de dicho primer eje (5) y restringido de manera giratoria al mismo;
- una segunda plataforma giratoria (41) fijada centralmente en dicho segundo eje (42) y substancialmente paralela a dicha primera plataforma giratoria (6) ;
- una pluralidad de segundas pinzas (44) montadas periféricamente en dicha segunda plataforma giratoria (41) , provista cada una de por lo menos un par de segundos brazos (46) que pueden ser accionados a través de segundos medios de accionamiento (48) para girar alrededor de diferentes segundos pivotes (47) con segundos ejes paralelos entre por lo menos una segunda posición abierta, en la que respectivas segundas zonas de retención (49) de dichos segundos brazos (46) están separadas entre sí para recibir o liberar dicho recipiente (2) , y por lo menos una segunda posición cerrada, en la que dichas segundas zonas de retención (49) están juntas entre sí para sujetar dicho recipiente (2) entre ellas.
7. Aparato (1) para transferir recipientes según la reivindicación 6, caracterizado por el hecho de que comprende medios de regulación (50) capaces de mover de manera deslizante dicho segundo eje (42) a lo largo de dicho eje vertical (Z) para variar la posición vertical de dicha segunda plataforma giratoria (41) .
8. Aparato (1) para transferir recipientes según la reivindicación 6, caracterizado por el hecho de que cada segundo brazo (46) de cada una de dichas segundas pinzas (44) está provisto de un asiento (55) que está dispuesto cerca del correspondiente segundo pivote (47) y que recibe, acoplado en el mismo, un segundo elemento de accionamiento (54) que puede moverse radialmente a través de dichos segundos medios de accionamiento (48) para girar dichos segundos brazos (46) .
9. Aparato (1) para transferir recipientes según la reivindicación 6, caracterizado por el hecho de que dicho segundos medios de accionamiento (48) comprenden una segunda leva (56) que está fijada en dicha estructura de soporte (4, 61) , coaxialmente con dicho segundo eje (42) , y a la cual se acopla un segundo seguidor de leva (57) montado en dicho segundo elemento de accionamiento (54) .
10. Aparato para transferir recipientes según la reivindicación 9, caracterizado por el hecho de que comprende segundos medios elásticos capaces de ejercer un empuje radial sobre dicho segundo elemento de accionamiento (54) , presionando dicho segundo seguidor de leva (57) contra el perfil de dicha segunda leva (56) .
11. Aparato (1) para transferir recipientes según la reivindicación 6, caracterizado por el hecho de que las segundas zonas de retención (49) de dichos segundos brazos (46) definen perfiles cóncavos opuestos destinados a recibir y sujetar el cuello (74) de dicho recipiente (2) en por lo menos dos puntos de contacto; estando configurados dichos perfiles cóncavos opuestos en forma de sobre generado por los puntos de tangencia de dichas segundas zonas de retención (49) con el cuello (74) de dicho recipiente (2) al variar el diámetro de dicho cuello (74) , cuando dichas segundas pinzas (44) se encuentran en dicha segunda posición cerrada.
Patentes similares o relacionadas:
Aparato y método para envasar bolsitas, del 3 de Junio de 2020, de Universal Pack S.r.l: Aparato para el envasado de bolsitas que comprende: - una unidad de envasado primaria configurada para suministrar dichas bolsitas […]
Aparato y método para orientar el cierre de extremo de un recipiente de bebida y aplicación de símbolos en una ubicación predeterminada, del 29 de Abril de 2020, de BALL CORPORATION: Un método para orientar y decorar un cierre de extremo para un recipiente de bebida, que comprende: proporcionar el cierre de extremo que comprende un ribete […]
Aparato para recibir y transportar una corriente de huevos, del 22 de Abril de 2020, de Moba Group B.V: Aparato para recibir y transportar una corriente de huevos, que comprende, - una transportadora para transportar huevos (E) en una dirección de transporte T, […]
Aparato de transporte para una máquina de envasado de pasta alimenticia, productos granulares y similares, del 22 de Abril de 2020, de ALTOPACK S.P.A.: Aparato de transporte capaz de transportar horizontalmente una pluralidad de envases que contienen alimentos, que comprende una cadena de bucle cerrado que se […]
Aparatos de transporte, del 15 de Abril de 2020, de FUJI MACHINERY CO., LTD: Un aparato de transporte que comprende: una sección de soporte configurada para soportar una pluralidad de artículos (P) sobre la misma […]
Un aparato para desplazar artículos que avanzan continuamente a lo largo de una dirección de avance, del 1 de Abril de 2020, de MARCHESINI GROUP S.P.A.: Un aparato para desplazar artículos que avanzan continuamente a lo largo de una dirección de avance (A), teniendo los artículos que ser desplazados y empujados transversalmente, […]
 Un dispositivo de transporte para transportar un elemento de recipiente para recibir artículos farmacéuticos desde una máquina contadora hasta el interior de recipientes de avance continuo, del 29 de Enero de 2020, de MARCHESINI GROUP S.P.A.: Un dispositivo de transporte para transportar un elemento (TC) de recipiente para recibir y transferir artículos, caracterizado por que comprende:
[…]
Un dispositivo de transporte para transportar un elemento de recipiente para recibir artículos farmacéuticos desde una máquina contadora hasta el interior de recipientes de avance continuo, del 29 de Enero de 2020, de MARCHESINI GROUP S.P.A.: Un dispositivo de transporte para transportar un elemento (TC) de recipiente para recibir y transferir artículos, caracterizado por que comprende:
[…]
Dispositivo de transporte y método de producción de artículos ponibles desechables mediante su uso, del 27 de Noviembre de 2019, de ZUIKO CORPORATION: Un dispositivo de transporte para transportar un objeto (A) a una superficie de una lámina (S1, S2), que comprende: un rodillo de entrega […]