Disposición de sensor inercial.
Disposición de sensor inercial, en particular para el montaje en un automóvil,
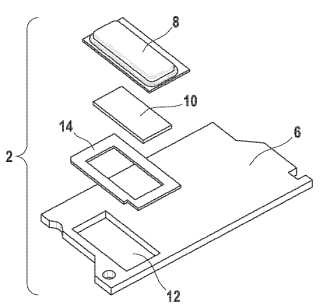
con un módulo sensor (8) colocadoen un soporte (6), que comprende un sensor inercial fabricado de acuerdo con la micromecánica y un circuito deevaluación, en la que el módulo sensor (8) está dispuesto sobre una placa de montaje (10) y está conectado a travésde un elemento de acoplamiento (14) elástico, que está constituido de un material elastómero (14) con el soporte (6)y en la que el sensor inercial es un sensor de la velocidad de giro, que detecta la aceleración de Coriolis de unelemento sensor oscilante, caracterizada porque el soporte (6) presenta una escotadura (12), porque la placa demontaje (10) está dispuesta en la escotadura (12), y porque el soporte (6) y la placa de montaje (10) estánconectadas a lo largo de al menos una parte de sus bordes opuestos a través del material de elastómero (14), yporque el elemento de acoplamiento (14) es solicitado a cizallamiento en el caso de un movimiento relativo delsoporte (6) y de la placa de montaje (10) en una dirección perpendicular a las superficies laterales anchas de laplaca de montaje (10) de acuerdo con la dirección del vector de la aceleración de Coriolis del elemento sensor.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/050373.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 30 02 20 70442 STUTTGART ALEMANIA.
Inventor/es: Ilic,Erich , INGRISCH,KURT, ABENDROTH,MANFRED.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60T8/1755 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60T SISTEMAS DE CONTROL DE FRENOS PARA VEHICULOS O PARTES DE ESOS SISTEMAS; SISTEMAS DE CONTROL DE FRENOS O PARTES DE ESOS SISTEMAS, EN GENERAL (control de sistemas de frenado electrodinámico B60L 7/00; control conjugado de frenos y otras unidades de accionamiento de vehículos B60W ); DISPOSICION DE ELEMENTOS DE FRENADO DE VEHICULOS EN GENERAL; DISPOSITIVOS PORTATILES PARA EVITAR EL MOVIMIENTO INDESEADO DE VEHICULOS; MODIFICACIONES REALIZADAS EN VEHICULOS PARA FACILITAR LA REFRIGERACION DE LOS FRENOS. › B60T 8/00 Disposiciones para adaptar la fuerza de frenado sobre la rueda a las condiciones propias del vehículo o al estado del suelo, p. ej. por limitación o variación de la fuerza de frenado (cambiando el número de cilindros de freno en acción en el sistema de frenado B60T 17/10). › Regulación de los frenos especialmente adaptada para el control de la estabilidad del vehículo, p.ej. teniendo en cuenta el ángulo de oscilación o la aceleración transversal al tomar una curva (sistemas de control de la estabilidad dinámica de los vehículos por otra forma que controlando una subunidad particular B60W 30/02).
- G01C19/56 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 19/00 Giróscopos; Dispositivos sensibles al giro con masas vibratorias; Dispositivos sensibles al giro sin masas móviles; Medida de velocidad angular usando efectos giroscópicos. › Dispositivos sensibles al giro con masas vibratorias, p. ej. sensores de velocidad vibratoria angular sobre la base de las fuerzas de Coriolis.
- G01C21/16 G01C […] › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › mediante la integración de la aceleración o la velocidad, p. ej. navegación inercial.
PDF original: ES-2452818_T3.pdf
Fragmento de la descripción:
Disposición de sensor inercial
La invención se refiere a una disposición de sensor inercial de acuerdo con el preámbulo de la reivindicación 1, en particular para el montaje en un automóvil así como a un aparato de control para un sistema para la regulación de la dinámica de la marcha de un automóvil con una disposición de sensor de este tipo.
En automóviles encuentran una aplicación cada vez más amplia los sistemas de seguridad activos y pasivos, en los que los sistemas de retención, como Airbags, así como los sistemas para la regulación de la dinámica de la marcha, como ESP (Programa electrónico de estabilidad) pertenecen actualmente ya al equipamiento estándar. Un componente esencial de estos sistemas son los sensores inerciales, que se utilizan para la medición de la aceleración o la velocidad de guiñada o bien la velocidad de giro del vehículo. Mientras que los sensores inerciales empleados en sistemas de retención, como Airbags, forman como sensores de aceleración para la medición de la aceleración de impacto o sensores de la velocidad de giro para la detección del vuelco la mayoría de las veces un componente integral de un aparato de control del sistema de retención, los sensores para la medición de la velocidad de guiñada o bien de la velocidad de giro dinámica de la marcha y de la aceleración transversal de sistemas para la regulación de la dinámica de la marcha, como el ESP, están realizados la mayoría de las veces como sensores desmontables y están alojados separados del sistema en un lugar adecuado en la célula de pasajeros. Sin embargo, se tiende también allí a la integración del sensor inercial en un aparato de control integrado.
Una solución técnica económica para la fabricación de sensores de la velocidad de giro son técnicas micromecánicas, en las que se decapa un elemento de medición del sensor, por ejemplo, a partir de un sustrato. En el funcionamiento del sensor se desplaza el elemento de medición a través de una excitación adecuada en un movimiento oscilante, cuya frecuencia está la mayoría de las veces entre 1 y 30 kHz y se mide la aceleración de Coriolis, que aparece en el caso de una rotación del elemento de medición oscilantes y es una medida para la velocidad de giro. Un circuito de evaluación con un desmodulador adecuado determina a partir de la aceleración de Coriolis medida la porción de la señal, que es proporcional a la velocidad de giro y a partir de ella se calcula la velocidad de giro.
Un problema grande en el empleo de tales sensores de la velocidad de giro en automóviles son, sin embargo, las aceleraciones de interferencia, que pueden aparecer de acuerdo con el lugar de montaje de los sensores en una extensión más o menos grande y que, cuando alcanzan un elemento de medición del sensor, tienen una influencia especialmente fuerte sobre su señal de salida especialmente cuando su frecuencia está en la zona de la frecuencia de excitación del sensor. Puesto que el desmodulador o bien el circuito de evaluación no pueden distinguir en este caso ya entre aceleración de Coriolis y aceleración de interferencia, se perturba fuertemente la señal de salida del sensor y de esta manera no es aceptable ya para el sistema para la regulación de la dinámica de la marcha, de manera que puede tener lugar una desconexión del sistema u otras interferencias.
Para reducir al mínimo la acción de las aceleraciones de interferencia, se aplican diferentes sistemas, como la búsqueda de un lugar de montaje, en el que aparezcan solamente aceleraciones de interferencia reducidas, un desacoplamiento técnico de la oscilación del sensor desde el lugar de montaje o combinaciones de ellos. Sin embargo, mientras que la búsqueda se puede revelar difícil y costosa debido a las relaciones estrechas de espacio en turismos modernos y debido a los ensayos de marcha necesarios para ello, el empaquetado de elementos de medición micromecánicos conocidos de sensores inerciales, a pesar de las múltiples formas de construcción, no es adecuado para impedir el desacoplamiento de aceleraciones de interferencia, por lo que actualmente se conecta todo el módulo que contiene el sensor, por ejemplo todo el aparato de control, a través de un miembro de acoplamiento con el lugar de montaje.
Ya se conoce a partir del documento US 2006/0000294 A1 una disposición de sensor inercial del tipo mencionado al principio, en la que el lado inferior del módulo sensor está conectado con el lado superior del soporte a través del elemento de acoplamiento elástico, que está constituido por un elemento adhesivo con viscoelasticidad y que debe proporcionar una absorción de las oscilaciones. Cuando el soporte y la placa de montaje se mueven relativamente entre sí como consecuencia de una aceleración de interferencia, cuya dirección corresponde a la dirección del vector de la aceleración de Coriolis del sensor de la velocidad de giro, este movimiento se realiza en una dirección, que está paralela a las superficies laterales anchas opuestas del módulo sensor y del soporte, de manera que el elemento adhesivo es solicitado a cizallamiento a través de una aceleración de interferencia de este tipo entre las superficies laterales anchas opuestas. Una propiedad de amortiguación predeterminada del elemento adhesivo con una frecuencia de amortiguación predeterminada se puede controlar a través de la modificación de la elasticidad del adhesivo sobre la base de las dimensiones del módulo sensor. No obstante, en muchos materiales elastómeros se reduce la elasticidad como consecuencia de las oscilaciones de la temperatura, lo que conduce a una modificación de la frecuencia de amortiguación.
Además, por ejemplo, se conocen en sí a partir del documento DE 44 31 232 A1 sensores de aceleración o sensores de la velocidad de giro configurar el elemento de medición propiamente dicho fabricado con medios micromecánicos como sistema integrado de masa de resorte con amortiguación, proporcionando a partir del sustrato unas nervaduras elásticas mecanizadas para la acción de resorte y la acción de amortiguación entre elemento de medición y un zócalo formado como el elemento de medición a partir del sustrato.
Se conoce a partir del documento US 2002/0158390 A1 prever en un sistema compacto de aislamiento de las oscilaciones con una carcasa cilíndrica y con una disposición de sensor inercial suspendida en la carcasa y desacoplada de la carcasa, una fijación aislante, que se forma de un elemento de elastómero en forma de anillo, que está dispuesto entre un elemento exterior rígido en forma de anillo y un elemento interior rígido en forma de anillo, de manera que en el caso de un movimiento relativo entre los dos elementos rígidos en dirección, un eje medio longitudinal de la carcasa cilíndrica es solicitado a cizallamiento.
Se conoce a partir del documento DE 199 21 692 A1 prever en una disposición para la protección de unidades funcionales electrónicas o grupos funcionales electrónicos varias carcasas interconectadas, que están conectadas por ejemplo a través de elementos de acoplamiento de amortiguación de las vibraciones con efecto de amortiguación de las vibraciones con la o con las carcasas adyacentes respectivas. La carcasa más interior contiene un sensor de la velocidad de guiñada S1.
La invención tiene el cometido de crear una disposición mejorada del sensor inercial en comparación con el estado de la técnica, un aparato de control integrado mejorado así como un automóvil mejorada.
La disposición de sensor inercial de acuerdo con la invención con las características de la reivindicación 1 permite, a pesar de una utilización de módulos sensores de venta en el comercio, que están constituidos por el sensor inercial y el circuito de evaluación integrado reducir el gato de aplicación en el caso de empleo en automóviles en una medida considerable, puesto que es innecesaria una búsqueda de un lugar de montaje adecuado como también el requerimiento de medidas posteriores para el desacoplamiento de las oscilaciones. Con las medidas de acuerdo con la invención, el sensor proporciona señales seguras y fiables incluso en el caso de una colocación de la disposición de sensor en un entorno fuertemente cargado por aceleraciones de interferencia o por oscilaciones de interferencia en todas las circunstancias.
La invención tiene el cometido de desacoplar el módulo sensor a través de la fijación adecuada de la masa del sistema de masa de resorte, de la resistencia elástica del sistema de masa de resorte así como de su amortiguación de acuerdo con la técnica de oscilaciones fuera del soporte, para reducir en una medida decisiva la sensibilidad a la aceleración o la sensibilidad a la oscilaciones del sensor de la velocidad... [Seguir leyendo]
Reivindicaciones:
1. Disposición de sensor inercial, en particular para el montaje en un automóvil, con un módulo sensor (8) colocado en un soporte (6) , que comprende un sensor inercial fabricado de acuerdo con la micromecánica y un circuito de evaluación, en la que el módulo sensor (8) está dispuesto sobre una placa de montaje (10) y está conectado a través 5 de un elemento de acoplamiento (14) elástico, que está constituido de un material elastómero (14) con el soporte (6) y en la que el sensor inercial es un sensor de la velocidad de giro, que detecta la aceleración de Coriolis de un elemento sensor oscilante, caracterizada porque el soporte (6) presenta una escotadura (12) , porque la placa de montaje (10) está dispuesta en la escotadura (12) , y porque el soporte (6) y la placa de montaje (10) están conectadas a lo largo de al menos una parte de sus bordes opuestos a través del material de elastómero (14) , y
porque el elemento de acoplamiento (14) es solicitado a cizallamiento en el caso de un movimiento relativo del soporte (6) y de la placa de montaje (10) en una dirección perpendicular a las superficies laterales anchas de la placa de montaje (10) de acuerdo con la dirección del vector de la aceleración de Coriolis del elemento sensor.
2. Disposición de sensor inercial de acuerdo con la reivindicación 1, caracterizada porque el módulo sensor (8) forma con el soporte (6) y con el elemento de acoplamiento (14) un sistema de masa de resorte con amortiguación.
3. Disposición de sensor inercial de acuerdo con la reivindicación 1 ó 2, caracterizada porque el material elastómero (14) es un Elastosil.
4. Disposición de sensor inercial de acuerdo con una de las reivindicaciones anteriores, caracterizada porque el material elastómero (14) está moldeado por inyección entre el soporte (6) y la placa de montaje (10) para el módulo sensor (8) .
5. Disposición de sensor inercial de acuerdo con una de las reivindicaciones anteriores, caracterizada porque el módulo sensor (8) está conectado a través de alambres de adhesión con un circuito (16) dispuesto sobre el soporte (6) .
6. Aparato de control integrado para un sistema para la regulación de la dinámica de la marcha de un automóvil, caracterizado por una disposición de sensor inercial integrado de acuerdo con una de las reivindicaciones anteriores.
7. Automóvil, caracterizado por un aparato de control integrado de acuerdo con la reivindicación 6.
Patentes similares o relacionadas:
Generación de estimación de la gravedad de la Tierra, del 3 de Junio de 2020, de Helsingin Yliopisto: Un procedimiento para generar estimaciones de la gravedad de la Tierra para períodos de tiempo secuenciales, en el que el procedimiento, llevado a cabo por un aparato , […]
Procedimiento y dispositivo para determinar parámetros de medición inerciales, del 6 de Mayo de 2020, de MBDA Deutschland GmbH: Procedimiento para determinar los parámetros de medición inerciales mediante una unidad de medición inercial que presenta sensores inerciales , donde al […]
Método y sistema de navegación inercial asistido por GPS, del 18 de Marzo de 2020, de IMI Systems Ltd: Un método de navegación inercial asistido por GPS que comprende: proporcionar múltiples sensores que incluyen múltiples unidades de medición de inercia (IMU) y al menos […]
Dispositivo y procedimiento de mantenimiento de actitud de un portador que utiliza girómetros, del 18 de Marzo de 2020, de Safran Electronics & Defense: Dispositivo de mantenimiento de actitud de un portador, comprendiendo el dispositivo: · tres girómetros primarios dispuestos […]
 Procedimiento de estimación del movimiento de un peatón, del 25 de Diciembre de 2019, de SYSNAV: Procedimiento de estimación del movimiento de un peatón en marcha que comprende las etapas de:
(a) medir una aceleración y una velocidad […]
Procedimiento de estimación del movimiento de un peatón, del 25 de Diciembre de 2019, de SYSNAV: Procedimiento de estimación del movimiento de un peatón en marcha que comprende las etapas de:
(a) medir una aceleración y una velocidad […]
Localización dentro de un entorno usando fusión de sensores, del 4 de Diciembre de 2019, de THE BOEING COMPANY: Un aparato que comprende: una pluralidad de sistemas de datos configurados para generar una pluralidad de flujos de datos en la cual la pluralidad de flujos […]
Procedimiento de gestión automática de un girómetro longitudinal montado en un aparato volador, del 20 de Noviembre de 2019, de MBDA FRANCE: Procedimiento de gestión automática de un girómetro longitudinal que está montado sobre un misil aéreo, susceptible de ser puesto en rotación, procedimiento […]
Ayudas de navegación para sistemas aéreos no tripulados en un entorno sin GPS, del 13 de Noviembre de 2019, de THE BOEING COMPANY: Método para estimar una posición o trayectoria de una aeronave en un entorno sin GPS que comprende: obtener, mediante un sistema de navegación inercial, una […]