(04/04/2018) Un controlador de grúa para el control semiautomático de una grúa giratoria, comprendiendo la grúa al menos un accionador giratorio para crear un movimiento de giro de la grúa y/o un accionador de amantillado para crear un movimiento de amantillado de la grúa, comprendiendo el controlador de grúa
una unidad de entrada que puede ser operada por un operador para proporcionar una velocidad de giro deseada y/o una velocidad de amantillado deseada como una entrada del operador y
un módulo de planificación de trayectoria de referencia predictivo del modelo que comprende una unidad de optimización para calcular una trayectoria de referencia que obedece a la dinámica del sistema y sigue la entrada del operador, y
un controlador de prealimentación que utiliza la trayectoria de referencia para controlar el accionador…
Método para controlar la orientación de una carga de grúa y una grúa de pescante.
Sección de la CIP Técnicas industriales diversas y transportes
(16/08/2017). Solicitante/s: LIEBHERR-WERK NENZING GMBH. Clasificación: B66C13/08, B66C13/06, B66C13/46.
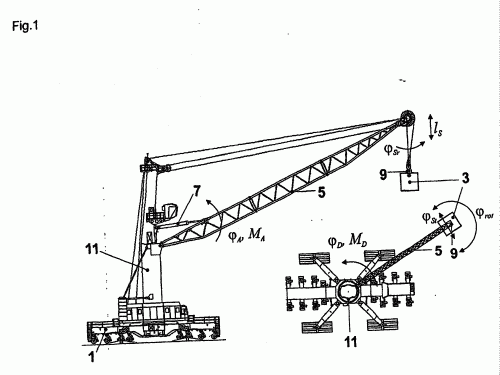
Método para controlar la orientación de una carga de grúa, en donde un manipulador para manipular la carga se conecta a una unidad de rotador a un gancho suspendido sobre cuerdas y un ángulo ηL de inclinación de la carga se controla mediante una unidad de control de la grúa,
Por medio de la cual,
la unidad de control es una unidad de control adaptativa en donde un estado del sistema estimado del sistema de grúa se determina mediante el uso de un modelo no lineal que describe las dinámicas de inclinación durante la operación caracterizada porque la no linealidad del modelo que describe las dinámicas de inclinación se refiere a la relación no lineal entre el ángulo de giro ◊ ≥ η L - φ C - φ D y el torque T reactivo resultante, por medio del cual φ C y φ D respectivamente se refieren al ángulo entre la unidad de rotador y la carga y un ángulo de rotación de la grúa.
PDF original: ES-2647590_T3.pdf
Grúa para sostener una carga suspendida en un cable de carga.
(22/03/2017) Grúa para sostener una carga suspendida en un cable de carga con un mecanismo de giro para girar la grúa, un mecanismo de basculación para la pluma y un mecanismo de elevación para hacer descender o elevar la carga suspendida en el cable de carga, con una unidad de control para el cálculo del accionamiento del mecanismo de giro, el mecanismo de basculación y/o el mecanismo de elevación, presentando la unidad de control una amortiguación de péndulo de carga y teniendo lugar el cálculo de las instrucciones de accionamiento para el accionamiento del mecanismo de giro, el mecanismo de basculación y/o el mecanismo de elevación basándose en un movimiento teórico de la carga indicado en coordenadas cartesianas, caracterizada…
Sistema de control para grúa de pluma.
(11/03/2015) Sistema de control que comprende una grúa de pluma, que tiene una torre y una pluma unida de manera pivotante a la torre , un primer actuador para crear un movimiento de elevación de la pluma , un segundo actuador para hacer rotar la torre , primeros medios para determinar la posición rA y/o la velocidad de la cabeza de la pluma mediante medición, segundos medios para determinar el ángulo de rotación jD y/o la velocidad de rotación de la torre mediante medición, controlando el sistema de control el primer actuador y el segundo actuador,
caracterizado porque
la aceleración de la carga en la dirección radial debida a una rotación de la torre se compensa mediante un movimiento de elevación de la pluma dependiente de la velocidad de rotación de la…
Control de grúa, grúa y procedimiento.
(29/01/2015) Control de grúa para la activación de los mecanismos de regulación de una grúa que tiene al menos unos ramales de cable primero y segundo para elevar la carga , con una amortiguación de oscilaciones de carga para amortiguar oscilaciones pendulares esféricas de la carga , estando previstas unas unidades de sensor primera y segunda que están asignadas a los ramales de cable primero y segundo para la determinación de los respectivos ángulos de cable y/o velocidades de ángulo de cable, caracterizado porque la amortiguación de oscilaciones de carga tiene una regulación no lineal en la que entran los ángulos de cable y/o las velocidades de ángulo de cable determinados por las unidades de sensor primera y segunda, y basándose la regulación no lineal en la inversión…
Grúa con control de grúa.
(28/01/2015) Grúa con una pluma , un control de grúa y al menos un cable para elevar una carga , estando prevista en el control de grúa al menos una unidad de sensor para determinar un ángulo de cable con respecto a la dirección de la fuerza de gravedad, en la que la al menos una unidad de sensor está dispuesta en un elemento de seguimiento de cable y se guía en el cable , caracterizada porque la al menos una unidad de sensor dispuesta en el elemento de seguimiento de cable está conectada con éste a través de una conexión cardán con la pluma de la grúa.
Escalera de placa giratoria.
(18/06/2014) Método para controlar el accionamiento de una escalera de placa giratoria o de una plataforma de mástil telescópico con el fin de suprimir las oscilaciones en las partes de la escalera o en las partes del mástil telescópico, teniendo una parte inferior y una parte superior y comprendiendo
- unidades de accionamiento de las partes de escalera o de las partes del mástil telescópico, y
- sensores de bandas de medición de la expansión para detectar el estado de flexión del conjunto de escalera o del mástil telescópico que se fijan a una parte inferior del conjunto de escalera o mástil telescópico
- un controlador que implementa un control del movimiento de las partes de escalera o de las partes del mástil telescópico, caracterizado por
- un giroscopio fijado a una parte superior de la escalera de placa giratoria o mástil telescópico para…
Escalera articulada o plataforma elevable con control de trayectoria de posición y amortiguación de vibración activa.
(31/10/2013) Escalera orientable o similar, con una unidad de escalera telescópica y, acoplado en el extremo de la unidad deescalera, un brazo articulado que porta una jaula, escalera orientable que contiene un control para mover lassecciones de escalera, estando la escalera orientable caracterizada por que, durante el desplazamiento de la jaula,se suprimen las vibraciones de las secciones de escalera, mediante la realimentación de por lo menos una de lassiguientes variables medidas, la flexión de la unidad de escalera en la dirección horizontal y vertical, el ángulo deelevación, el ángulo de rotación, la longitud de extensión y la torsión de la unidad de escalera por medio de uncontrolador a las variables de control para las unidades…
PROCEDIMIENTO PARA LA MANIPULACION AUTOMATICA DE UNA CARGA DE UNA GRUA CON AMORTIGUACION DEL MOVIMIENTO PENDULAR DE LA CARGA Y DISPOSITIVO PLANIFICADOR DE LA TRAYECTORIA.
(11/05/2010) Procedimiento para la manipulación de una carga, que está colgada en un cable portador de la carga, que pertenece a una grúa o a una excavadora, con un mecanismo giratorio para hacer girar a la grúa o a la excavadora, con un mecanismo de pluma basculante para el alzamiento o bien para la inclinación de un aguilón y con un mecanismo de elevación para levantar o bien para hacer descender la carga, que está colgada del cable, con una regulación controlada por medio de ordenador para la amortiguación del movimiento pendular de la carga, que presenta un dispositivo planificador de la trayectoria, caracterizado porque comprende…
GRUA O EXCAVADORA PARA LA TRANSFERENCIA DE UNA CARGA SUSPENDIDA DE UN CABLE DE CARGA CON GUIA DE DESPLAZAMIENTO OPTIMIZADA.
(16/03/2008) Grúa o excavadora para la transferencia de una carga suspendida de un cable de carga con un mecanismo de rotación para la rotación de la grúa o excavadora, un mecanismo de basculación para el enderezamiento y/o inclinación de un pescante y un mecanismo de elevación para la elevación y/o bajada de la carga suspendida del cable con un sistema de accionamiento, con un control de trayectoria , caracterizada porque en el control de trayectoria trayectorias de control óptimas basadas en un modelo en base a un planteamiento no lineal de modelo se calculan en línea y se actualizan mediante retroalimentación de las variables de estado y porque las variables de salida (UoutD, UoutA, UoutL,…
CONTROL DE ESCALERA ORIENTABLE.
Secciones de la CIP Técnicas industriales diversas y transportes Construcciones fijas
(01/05/2007). Solicitante/s: IVECO MAGIRUS AG. Clasificación: B25J9/16, E06C5/44.
Escalera orientable o similar que comprende una unidad de escalera, una jaula , dispositivos de mando y un medio de control para el desplazamiento de las partes de escalera , caracterizada porque el medio de control está diseñado de tal manera que cuando la jaula se desplaza, vibraciones de las partes de escalera son suprimidas y porque la flexión de la escalera en el sentido horizontal y vertical, es al menos una de las siguientes variables medidas: ángulo de elevación, ángulo de rotación, longitud del despliegue y masa de la jaula, son realimentadas mediante un controlador hacia las variables de control para los dispositivos de mando.
(16/04/2007) Escalera orientable o similar que tiene partes de escalera y una jaula que comprende: - un medio de control para el desplazamiento de dichas partes de escalera y diseñado de tal manera que cuando la jaula se desplaza, las vibraciones de las partes de escalera son suprimidas y la jaula es guiada sobre una trayectoria preestablecida, en la cual el movimiento ideal de la escalera está esquematizado en un modelo dinámico basado en ecuaciones diferenciales, y el medio de control calcula las variables de control de los dispositivos de mando de dichas partes de escalera para un desplazamiento sustancialmente si vibración de la escalera a partir del modelo dinámico; - un módulo de planificación de trayectoria (39 o 41) para producir la trayectoria de desplazamiento de la escalera en un entorno de trabajo; y - un bloque de control de gobierno…
GRUA O EXCAVADORA PARA EL VOLTEADO DE UNA CARGA SUSPENDIDA DE UN CABLE PORTACARGA CON AMORTIGUACION DE LA OSCILACION DE LA CARGA.
Sección de la CIP Técnicas industriales diversas y transportes
(01/11/2006). Ver ilustración. Solicitante/s: LIEBHERR-WERK NENZING GMBH. Clasificación: B66C13/08, B66C13/06.
Grúa o excavadora para el volteado de una carga suspendida de un cable portacarga con un mecanismo giratorio para rotar la grúa o la excavadora, un mecanismo basculante para elevar y/o descender una pluma y un mecanismo de elevación para levantar y/o para bajar la carga suspendida del cable con una regulación controlada por ordenador para la amortiguación de las oscilaciones de la carga, que muestra un módulo de planificación de la trayectoria , un dispositivo de compensación de las fuerzas centrípetas y, al menos, un regulador del eje para el mecanismo giratorio , un regulador del eje para el mecanismo basculante y un regulador del eje para el mecanismo de elevación , caracterizada porque el ángulo de oscilación y la velocidad angular de oscilación de la carga (PhiSr, PhiSt, PhiSr, PhiSt) se calcula a partir de, al menos, un giroscopio.
{kind=link}