19 inventos, patentes y modelos de GORDON, RAPHAEL
Sistemas y métodos para detectar la presión externa.
Secciones de la CIP Necesidades corrientes de la vida Física
(14/06/2017). Solicitante/s: ALCON RESEARCH, LTD.. Clasificación: A61M3/02, G01L1/00.
Una consola quirúrgica , que comprende:
una placa de compresión ; y
un módulo sensor de presión que comprende un sensor de fuerza;
en donde la placa de compresión está configurada para moverse con respecto al módulo sensor de presión; y
en donde el módulo sensor de presión está configurado para medir una fuerza ejercida sobre el módulo sensor de presión por un recipiente flexible entre el módulo sensor de presión y la placa de compresión, en donde la fuerza se utiliza para determinar una presión asociada con el recipiente flexible,
caracterizado por que el módulo sensor de presión comprende una placa de contacto con la bolsa ; en donde el sensor de fuerza mide una fuerza ejercida sobre el sensor de fuerza por la placa de contacto con la bolsa, en donde la fuerza de la placa de contacto con la bolsa es del contacto con el recipiente flexible situado entre la placa de contacto con la bolsa y la placa de compresión.
PDF original: ES-2635075_T3.pdf
Control de presión en un sistema de facoemulsificación.
(21/09/2016) Un método implementado por ordenador para controlar un sistema quirúrgico que posee una vía de flujo de fluido, donde el sistema quirúrgico comprende:
una fuente de fluido de irrigación a presión ;
una línea de irrigación acoplada en relación de circulación de fluido con la fuente de fluido de irrigación a presión;
una pieza de mano acoplada en relación de circulación de fluido con la línea de irrigación; incluyendo la pieza de mano un manguito de irrigación;
un sensor de presión de irrigación situado en o a lo largo de la fuente de fluido de irrigación a presión o de la línea de irrigación; y
un controlador para controlar la fuente de fluido de irrigación…
Control de presión en un sistema de facoemulsificación.
Sección de la CIP Necesidades corrientes de la vida
(03/08/2016). Solicitante/s: ALCON RESEARCH, LTD.. Clasificación: A61F9/007.
Sistema quirúrgico que comprende:
una fuente de fluido de irrigación a presión ;
una línea de irrigación acoplada en relación de circulación de fluido con la fuente de fluido de irrigación a presión;
una pieza de mano acoplada en relación de circulación de fluido con la línea de irrigación; incluyendo la pieza de mano un manguito de irrigación;
un sensor de presión de irrigación situado en o a lo largo de la fuente de fluido de irrigación a presión o de la línea de irrigación; y
un controlador para controlar la fuente de fluido de irrigación a presión;
en el que el controlador está adaptado para controlar la fuente de fluido de irrigación a presión en base a una lectura de sensor de presión de irrigación y a un valor de flujo estimado modificado por un factor de compensación,
caracterizado por que el factor de compensación se basa en la compresión del manguito de irrigación que restringe el flujo de fluido de irrigación.
PDF original: ES-2596455_T3.pdf
Sistema de identificación de fuente de irrigación.
(20/07/2016) Una fuente de irrigación que comprende:
un recipiente para contener una cantidad de fluido de irrigación;
un conector acoplado de forma fluida al recipiente y solidario con él, teniendo el conector una extremidad de salida y un cuello , teniendo el cuello una pluralidad de protuberancias sobre el cuello,
caracterizada por que las protuberancias son seleccionadas de un agrupamiento de protuberancias identificadoras, proporcionando la pluralidad de protuberancias identificadoras un identificador único para el recipiente; y
por que la fuente de irrigación comprende además una característica de alineación y un conector de perforador dispuesto sobre el cuello, estando la característica de alineación y el conector de perforador dispuestos para formar un espacio…
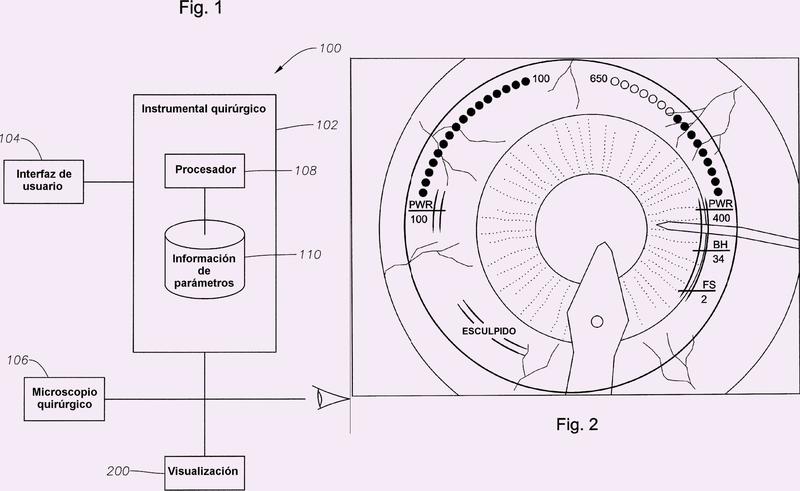
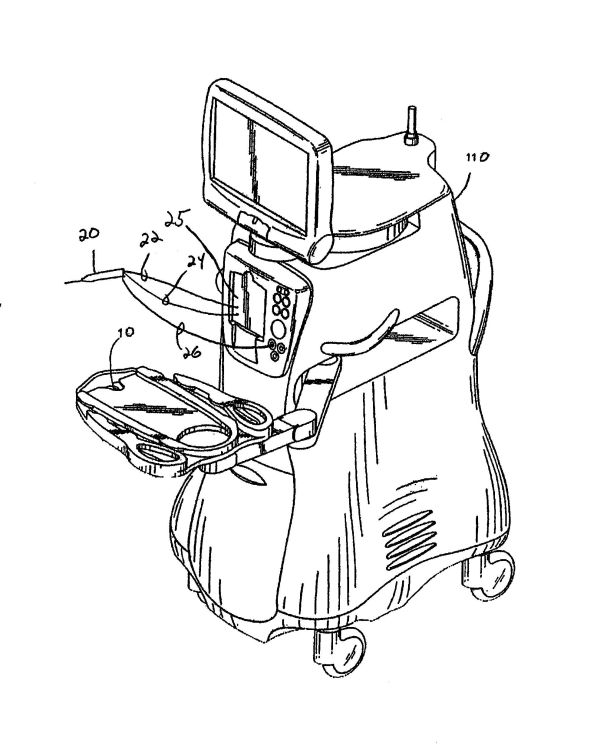
Visualización para consola quirúrgica oftálmica con sectores seleccionables por el usuario.
Sección de la CIP Necesidades corrientes de la vida
(30/12/2015). Ver ilustración. Solicitante/s: ALCON RESEARCH, LTD.. Clasificación: A61F9/008.
Sistema quirúrgico oftálmico , que comprende:
un dispositivo de visualización que puede funcionar para generar una visualización superpuesta sobre una imagen del ojo de un paciente, estando el dispositivo de visualización adaptado para proyectar la visualización en la trayectoria óptica de un microscopio quirúrgico ,
una interfaz de usuario que puede funcionar para recibir una selección de usuario de uno o más parámetros quirúrgicos seleccionables por el usuario que se deben visualizar,
caracterizado por que el dispositivo de visualización puede funcionar para visualizar sobre una imagen del ojo de un paciente una pluralidad de sectores de visualización no solapados que caen dentro de un sector de un círculo centrado en el centro de la visualización, mostrando cada sector de visualización uno de entre una pluralidad de los parámetros quirúrgicos de facoemulsificación y/o vitrectomía seleccionados por el usuario.
PDF original: ES-2559039_T3.pdf
Control de potencia por nivel de vacío para pieza de mano de facoemulsificación.
(13/05/2015) Sistema de facoemulsificación oftálmica, que comprende:
una pieza de mano que incluye una aguja o punta de corte , y unos medios ultrasónicos para hacer vibrar la punta de corte hacia delante y hacia atrás con el fin de producir una carrera de aguja longitudinal, y de hacer vibrar la punta de corte en un movimiento de retorcimiento o torsional;
unos medios para medir una presión de vacío en un conducto de aspiración ;
estando dicho sistema adaptado para proporcionar una serie de impulsos de potencia a la pieza de mano, presentando cada uno de la serie de impulsos de potencia:
una primera parte que produce un…
Sistema y procedimiento para una interfaz de usuario.
(20/08/2014) Dispositivo para presentar información conjuntamente con una consola quirúrgica , que comprende:
un visualizador frontal configurado para ser montado en un microscopio;
comprendiendo dicho visualizador frontal:
un anillo de pieza ocular que puede funcionar para ser encajado en o dentro de una pieza ocular del microscopio,
y que puede funcionar para recibir datos referentes a un conjunto de parámetros quirúrgicos procedentes de la consola quirúrgica y que presenta una respuesta visual correspondiente a un primer parámetro a un usuario ,
caracterizado por que una guía flexible translúcida…
Procedimiento para someter a prueba un sistema quirúrgico.
(11/09/2013) Procedimiento automatizado para someter a prueba un sistema de irrigación/aspiración quirúrgico, comprendiendo dicho sistema;
(a) una pieza de mano quirúrgica que comprende una cámara de prueba ,
(b) una fuente de fluido de irrigación conectada a la pieza de mano,
(c) una fuente o bomba de aspiración conectada a la pieza de mano,
en el que la fuente de fluido de irrigación y la fuente de aspiración están bajo el control de una consola quirúrgica y en el que la cámara de prueba proporciona un trayecto de fluido cerrado desde la fuente de fluido de irrigación a la fuente de aspiración ;
caracterizado porque…
Control de succión para sistema de aspiración de facoemulsificación.
(20/06/2012) Sistema quirúrgico , que comprende:
a) una pieza de mano que tiene una función de aspiración;
b) una consola de control ;
c) una bomba de aspiración por lo menos parcialmente situada en la consola de control, proporcionando labomba de aspiración vacío a la pieza de mano quirúrgica a través de un conducto de aspiración ;
d) una aireación de aspiración en un conducto de aireación de aspiración que proporcionacomunicación fluídica a través de una válvula de aireación entre un depósito de fluido y el conducto deaspiración ; caracterizado porque comprende
e) un dispositivo de entrada ajustable por el usuario conectado a la consola de control, para modificar elfuncionamiento…
SISTEMA PARA CONTROLAR UN SISTEMA QUIRÚRGICO BASADO EN UNA TASA DE CAMBIO DE UN PARÁMETRO DE FUNCIONAMIENTO.
(11/02/2011) Sistema quirúrgico , presentando el sistema quirúrgico una pieza de mano de ultrasonidos , presentando la pieza de mano de ultrasonidos una punta de corte , comprendiendo el sistema unos medios para:determinar un cambio en un primer parámetro de funcionamiento del sistema quirúrgico;determinar un estado de oclusión basándose en el cambio; yajustar una cantidad de potencia suministrada a la punta de corte de la pieza de mano de ultrasonidos sobre la base de la etapa de oclusión determinada,caracterizado porque presenta unos medios para:muestrear una tasa real de cambio en el primer parámetro de funcionamiento durante el funcionamiento del sistema quirúrgico;comparar la tasa de muestreo de cambio con una tasa patrón predefinida de cambio en por lo menos un primer parámetro de funcionamiento; yajustar dicha…
PROCEDIMIENTO DE PRUEBA DE UN SISTEMA QUIRURGICO.
(23/11/2009) Procedimiento de cebado y ajuste de un sistema quirúrgico para controlar la irrigación/aspiración y para determinar una relación de resistencia del trayecto de irrigación en un sistema de irrigación que presenta un sensor de presión de irrigación, que comprende las etapas siguientes:
a) conectar una fuente de fluido de irrigación a una pieza de mano quirúrgica a través de un conducto de irrigación, estando la fuente de fluido de irrigación bajo el control del sistema quirúrgico;
b) conectar una fuente de vacío de aspiración a la pieza de mano quirúrgica a través de un conducto de aspiración, estando la fuente de aspiración bajo…
SISTEMA PARA CONTROLAR UN SISTEMA QUIRURGICO BASADO EN FLUJO DE IRRIGACION.
(23/10/2009) Sistema quirúrgico que presenta una pieza de mano de ultrasonidos , presentando la pieza de mano de ultrasonidos una punta de corte , comprendiendo el sistema unos medios de control para: establecer una temperatura umbral; vigilar una presión de irrigación en un conducto que corre hasta la pieza de mano de ultrasonidos; calcular un caudal de fluido de irrigación; determinar una capacidad de absorción de calor para el caudal calculado de fluido de irrigación; determinar una temperatura de un ojo basándose en una comparación de la capacidad de absorción de calor determinada y una cantidad de potencia que se suministra a la pieza de mano de ultrasonidos; comparar la temperatura determinada del ojo con la temperatura umbral; y si fuera necesario, unos medios para ajustar…
Sección de la CIP Necesidades corrientes de la vida
(26/06/2009). Ver ilustración. Solicitante/s: ALCON, INC. Clasificación: A61F9/007.
Pieza de mano quirúrgica ultrasónica capaz de proporcionar movimiento tanto longitudinal como torsional o de retorcimiento en una punta de pieza de mano, que comprende un transformador o cuerno de impedancia acústica y un núcleo magnetoestrictivo , comprendiendo dicho núcleo magnetoestrictivo: #(a) una pila magnetoestrictiva laminada acoplada al cuerno; #(b) una bobina eléctrica que rodea la pila; y #(c) unos medios adaptados para suministrar una señal de activación seleccionada a la bobina a fin de provocar un movimiento longitudinal de la pila y del cuerno, caracterizada porque dichos medios están adaptados asimismo para suministrar una señal de activación seleccionada a la bobina a fin de provocar un movimiento longitudinal de la pila y el cuerno y a la pila a fin de provocar un movimiento torsional de la pila y del cuerno.
BOMBA PERISTALTICA CON UN CONTROL ADAPTIVO DE VELOCIDAD VARIABLE.
Sección de la CIP Mecánica, iluminación, calefacción, armamento y voladura
(12/06/2009). Ver ilustración. Solicitante/s: ALCON, INC. Clasificación: F04B43/12, F04B49/20.
Bomba peristáltica , que comprende un árbol giratorio y un cabezal de rodillo que soporta una pluralidad de rodillos montados en el árbol y adaptados en su utilización para desplazar fluido a lo largo de un segmento de un canal de fluido flexible , que comprende un control adaptivo de velocidad variable configurado para acelerar la rotación de la bomba a través de puntos de flujo mínimo conocidos y para desacelerar la rotación de la bomba a través de puntos de flujo máximo conocidos, en la que la aceleración y la desaceleración de la bomba peristáltica se basan en un perfil de pulsación de bomba predeterminado, caracterizada porque una identificación del perfil de pulsación de bomba predeterminado está almacenado en un casete , que comprende el segmento de un canal de fluido flexible , para el reconocimiento automático de un casete que se está utilizando con la bomba peristáltica.
(16/02/2009) Sistema quirúrgico, que comprende: a) una consola quirúrgica que presenta una parte receptora de casete ; b) un casete (10, 10'') dimensionado y conformado para ser recibido en la parte receptora de casete de la consola quirúrgica, comprendiendo el casete: un alojamiento (12, 12''); un sensor de presión (40, 50; 40'', 50''); unos medios para identificar el casete y almacenar la información sobre el casete legible por la consola; c) presentando la consola quirúrgica un detector , de manera que la información contenida en los medios de identificación puede ser detectada o recibida por el detector cuando el casete es recibido por…
PROCEDIMIENTO PARA CONTROLAR UN SISTEMA QUIRURGICO BASADO EN UNA CARGA SOBRE EL EXTREMO CORTANTE DE UNA PIEZA DE MANO.
Sección de la CIP Necesidades corrientes de la vida
(01/02/2009). Ver ilustración. Solicitante/s: ALCON, INC. Clasificación: A61B17/32, A61F9/007.
Procedimiento para controlar un sistema quirúrgico presentando el sistema quirúrgico una pieza de mano ultrasónica , pieza de mano ultrasónica que dispone de una punta cortante para cortar tejidos, comprendiendo el procedimiento las etapas siguientes: establecer un nivel umbral de potencia ; monitorizar una carga en la punta cortante de la pieza de mano ultrasónica mediante la monitorización de la tensión y la intensidad eléctricas extraídas por la pieza de mano durante un intervalo (1110a) de potencia de detección diferente de cero , transcurriendo el intervalo de potencia de detección entre intervalos de potencia de corte (1100a, 1100b); comparar la cantidad de potencia extraída por la pieza de mano y el nivel umbral de potencia; y ajustar una cantidad de potencia suministrada a la punta cortante de la pieza de mano ultrasónica si la potencia extraída por la pieza de mano supera el nivel umbral de potencia.
CAMARA DE DETECCION DE PRESION DE FLUIDO.
Sección de la CIP Necesidades corrientes de la vida
(01/09/2008). Ver ilustración. Solicitante/s: ALCON, INC. Clasificación: A61M1/00.
Casete quirúrgico , adaptado para ser recibido en una parte receptora de casete de una consola quirúrgica , que comprende: (a) un cuerpo ; (b) una cámara de detección de presión formada en el cuerpo; y (c) una extensión de tubo que se extiende a través de dicha cámara de detección de presión, definiendo dicha extensión de tubo por lo menos un orificio que se comunica de forma fluídica con la cámara de detección de presión, estando adaptado dicho por lo menos un orificio para permitir el purgado de aire de la cámara durante el cebado inicial del casete, caracterizado porque la extensión de tubo presenta una parte de diámetro reducido con el fin de generar una restricción de flujo en el interior de la extensión de tubo.
Sección de la CIP Necesidades corrientes de la vida
(01/12/2005). Ver ilustración. Solicitante/s: ALCON, INC. Clasificación: A61M1/00, A61B19/00.
Casete quirúrgico adaptado para ser recibido por un sistema quirúrgico, comprendiendo el casete un alojamiento y una pluralidad de pestañas de identificación que sobresalen de la carcasa para disponerse en el camino de una matriz de fuente de luz cuando se recibe por el sistema, caracterizado porque las pestañas varían en su grado de opacidad desde completamente opaco a parcialmente translúcido hasta relativamente diáfano, de forma que la transmisibilidad de la luz a través de las pestañas puede utilizarse para determinar el tipo de casete , basándose en el grado de opacidad de las pestañas de una forma predeterminada, en el que la cantidad de casetes identificables de forma distinta puede incrementarse, sin aumentar la cantidad de pestañas de identificación.
SISTEMA DE IDENTIFICACION PARA UN CASETE QUIRURGICO.
(16/10/2005) Procedimiento para identificar un casete quirúrgico a partir de una pluralidad de casetes quirúrgicos, comprendiendo el procedimiento las etapas siguientes: a)proporcionar una consola quirúrgica que presenta una parte que recibe un casete; b)proporcionar un sistema de control que presenta una pluralidad de diodos luminiscentes y los correspondientes fotodetectores en la parte que recibe el casete de la consola quirúrgica; c)calibrar el sistema de control ajustando la potencia de los diodos luminiscentes hasta que se alcanza un nivel de potencia ajustado en los fotodetectores, caracterizado porque comprende:…
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}