20 inventos, patentes y modelos de GARCIA VACAS,FRANCISCO
Método de regulación para un sistema de aire acondicionado.
(31/01/2018) Método de regulación para un sistema de aire acondicionado donde dicho sistema comprende:
a) una máquina de ciclo térmico para la generación de un flujo de aire a una determinada temperatura, y una presión superior a la presión atmosférica, donde dicha máquina dispone de un interfaz de entrada de señal adaptado para especificar al menos, o la velocidad del ventilador de la máquina Vm, o la temperatura de consigna de la máquina Tm, o ambas; permitiendo la regulación de la potencia térmica y el ajuste del caudal de aire suministrado,
b) un distribuidor que comprende:
- una entrada acoplada a la salida de la máquina ,
- una pluralidad n de salidas para acondicionar una pluralidad…
Válvula que tiene un dispositivo de limitación de apertura o cierre.
(15/11/2017) Una válvula que comprende un obturador , un eje giratorio y un dispositivo de limitación de apertura o cierre, siendo la válvula del tipo que se cierra o abre mediante el giro del obturador en torno al eje giratorio , y comprendiendo el dispositivo de limitación de apertura o cierre:
- un soporte cuya configuración se extiende en un plano principal que se sitúa esencialmente perpendicular al eje longitudinal del eje giratorio , y donde dicho soporte comprende:
o medios de fijación adaptados para fijar dicho soporte al conducto en el que está localizada la válvula,
o un eje para un brazo de regulación para regular el valor máximo…
Dispositivo para la fijación del injerto en mosaicoplastia de tracción.
(27/07/2015) La invención describe un dispositivo para el taladrado y fijación del injerto osteocondral en la técnica quirúrgica de mosaicoplastia de tracción, comprendiendo el dispositivo : un primer cuerpo que tiene un primer orificio cilíndrico pasante para recibir un injerto ; y un segundo cuerpo contiguo al primer cuerpo y que tiene un segundo orificio cilíndrico pasante para recibir una broca o una varilla , donde el primer orificio tiene un diámetro mayor que el segundo orificio , y donde el primer orificio y el segundo orificio son coaxiales entre sí.
KIT PARA MOSAICOPLASTIA DE TRACCIÓN.
Sección de la CIP Necesidades corrientes de la vida
(02/07/2015). Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: A61F2/46.
La invención describe un dispositivo para el taladrado y fijación del injerto osteocondral en la técnica quirúrgica de mosaicoplastia de tracción, comprendiendo el dispositivo : un primer cuerpo que tiene un primer orificio cilíndrico pasante para recibir un injerto ; y un segundo cuerpo contiguo al primer cuerpo y que tiene un segundo orificio cilíndrico pasante para recibir una broca o una varilla , donde el primer orificio tiene un diámetro mayor que el segundo orificio , y donde el primer orificio y el segundo orificio son coaxiales entre sí.
Sistema de dirección con geometría variable.
(25/11/2014) Sistema de dirección con geometría variable que permite un ajuste rápido y sencillo de la geometría de la dirección del vehículo, lo que permite modificar su comportamiento durante la conducción. La dirección de la invención fundamentalmente comprende: una tija superior y una tija inferior esencialmente paralelas; una horquilla de suspensión que comprende al menos una barra conectada entre la tija superior y a la tija inferior ; y un eje de la dirección conectado entre la tija superior y la tija inferior , donde las conexiones entre las tijas superior e inferior y, respectivamente, la al menos una barra de la horquilla de suspensión y el eje de la dirección , están configuradas para permitir un giro y una traslación relativos entre dicha horquilla de suspensión y dicho eje de la dirección .
Dispositivo para la detección y clasificación de óxido residual en líneas de producción de laminados metálicos.
(24/09/2014) Especialmente concebido para realizar de forma totalmente automática la detección de manchas residuales de óxido (cascarilla residual) así como su clasificación en líneas de producción de laminados metálicos sin necesidad de detener la línea, la invención consiste en un bastidor o caja , dotada de medios de desplazamiento sobre la superficie de la lámina metálica a examinar, en cuyo seno se establece una cámara CCD de alta resolución, así como un equipo de iluminación de alta potencia y generador de luz difusa, cámara cuya señal de vídeo es enviada a un PC dotado de un software interno de procesamiento de las imágenesobtenidas que permite la detección y clasificación de…
Dispositivo de infusión de medicamento fluido.
(09/05/2014) Dispositivo de infusión de medicamentos fluidos que tiene un reservorio presurizado de medicamento, un catéter de administración del fármaco al paciente y una válvula dispuesta entre ambos, donde la válvula tiene una cámara intermedia que, en función de la posición de un elemento obturador, se comunica alternativamente bien con el reservorio para ser llenada de medicamento, o bien con el catéter para la administración del mismo. Un émbolo dosificador que tiene una posición extendida donde su extremo este al menos parcialmente introducido en la cámara intermedia se encarga de impulsar el medicamento fluido hacia el catéter. Se mejora la precisión de los dispositivos actuales, ya que puede controlarse con gran precisión el volumen de medicamento administrado al paciente con una gran precisión. El diseño de la…
DISPOSITIVO PARA AJUSTAR EL VOLUMEN DE INYECTABLE DE UNA JERINGA.
(23/05/2012) Dispositivo para ajustar el volumen de inyectable en una jeringa, constituido por un primer y un segundo discos (6 y 7) de igual diámetro, adosados por una de sus bases y montados según un eje común, con facultad de giro independiente sobre el mismo. Estos discos disponen, a partir de la periferia, de escotaduras axiales (15 y 16) alineables y a partir de la base externa y en coincidencia con estas escotaduras de escalones axiales (17 y 18) de altura progresivamente creciente en un sentido, en diferente magnitud en ambos discos. Cada dos escotaduras (15 y 16) alineadas determinan un alojamiento para el vástago de una jeringa, mientras que los escalones definen superficies de apoyo para las alas de la cámara cilíndrica…
NARIZ ELECTRÓNICA DE ALTA FRECUENCIA DE SENSADO Y PROCEDIMIENTO PARA DETERMINAR LA COMPOSICIÓN CUANTITATIVA Y CUALITATIVA DE UN GAS O MEZCLA DE GASES MEDIANTE LA MISMA.
(14/05/2012) Nariz electrónica de alta frecuencia de sensado y procedimiento para determinar la composición cuantitativa y cualitativa de un gas o mezcla de gases mediante la misma. La presente invención se refiere a una nariz electrónica que comprende un conjunto de bloques redundantes de sensores de gas que se alternan en la aspiración del aire a oler, de tal manera que mientras un bloque de sensores realiza la medición, los otros aspiran aire limpio con objeto de recuperar la sensibilidad olfativa, y así poder realizar medidas rápidas. Cada bloque se aloja en una cámara distinta y comprende un conjunto de sensores sensibles a diversas sustancias volátiles, con lo que, además de concentraciones, se puede reconocer una gran variedad de olores. La presente invención también se refiere a un procedimiento para determinar la composición cuantitativa…
NARIZ ELECTRÓNICA DE ALTA FRECUENCIA DE SENSADO Y PROCEDIMIENTO PARA DETERMINAR LA COMPOSICIÓN CUANTITATIVA Y CUALITATIVA DE UN GAS O MEZCLA DE GASES MEDIANTE LA MISMA.
Sección de la CIP Física
(19/04/2012). Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: G01N33/00.
Nariz electrónica de alta frecuencia de sensado y procedimiento para determinar la composición cuantitativa y cualitativa de un gas o mezcla de gases mediante la misma. La presente invención se refiere a una nariz electrónica que comprende un conjunto de bloques redundantes de sensores de gas que se alternan en la aspiración del aire a oler, de tal manera que mientras un bloque de sensores realiza la medición, los otros aspiran aire limpio con objeto de recuperar la sensibilidad olfativa, y así poder realizar medidas rápidas. Cada bloque se aloja en una cámara distinta y comprende un conjunto de sensores sensibles a diversas sustancias volátiles, con lo que, además de concentraciones, se puede reconocer una gran variedad de olores. La presente invención también se refiere a un procedimiento para determinar la composición cuantitativa y cualitativa de un gas o mezcla de gases mediante la utilización de dicha nariz electrónica.
(29/11/2011) Robot esférico, que comprende una carcasa esférica en la que se alojan una base portante y un mecanismo de actuación . La base portante apoya sobre la superficie interna de la carcasa mediante elementos de rodadura y tiene el centro de gravedad situado por debajo del centro geométrico de la carcasa esférica. El mecanismo de actuación esta compuesto por dos ruedas , cada una accionada por un motor, que transmite movimiento a la carcasa
SISTEMA DE FRENADO PARA AUTOMOVIL CON PREDICCION DE ADHERENCIA Y CONTROL CONTINUO DE PRESION DE FRENADA.
(17/08/2011) Sistema de frenado para automóvil con predicción de adherencia y control continuo de presión de frenada, que comprende un circuito hidráulico donde es regulada la presión de frenado mediante el control de una válvula proporcional de presión, la cual mantiene la presión necesaria en el pistón de freno para realizar la frenada adecuada. El control de la frenada es realizado en todo momento por un sistema de control capaz de conocer la adherencia existente en cada instante y establecer las condiciones idóneas de presión en el pistón de frenada, produciéndose en todo instante un control óptimo de dicha presión y consiguiendo que en…
APARATO QUIRURGICO DE LAPAROSCOPIA Y ENDOSCOPIA.
(24/05/2010) Aparato quirúrgico de laparoscopia y endoscopia que puede emplearse en operaciones con una sola incisión. Consta de una camisa que se introduce en el tejido a través de la incisión, sobre la que se fija un cuerpo y, sobre éste, una tapa en la que van insertados un número variable de subconjuntos , cuya misión es servir de acceso y soporte a los instrumentos necesarios para hacer la intervención, a la vez que el sistema de cierre garantiza la estanqueidad de sistema. Lleva una entrada de gas provista con una llave de paso , para la introducción del gas que se desee emplear con objeto de propiciar una atmósfera adecuada en la zona de la intervención
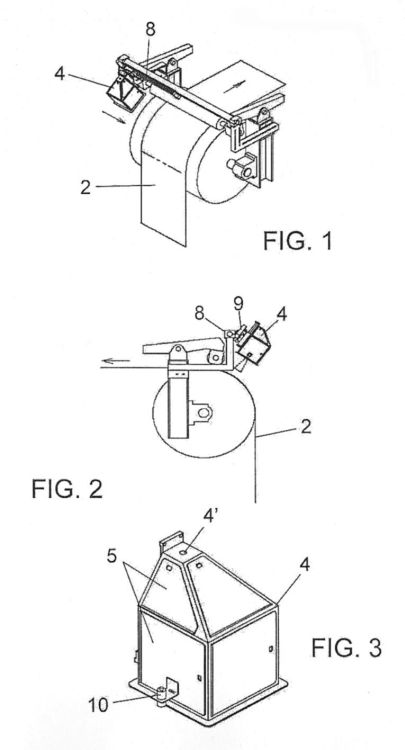
DISPOSITIVO PARA LA DETECCION Y LA CLASIFICACION DE OXIDO RESIDUAL EN LINEAS DE PRODUCCION DE LAMINADOS METALICOS.
Secciones de la CIP Técnicas industriales diversas y transportes Física
(01/04/2009). Ver ilustración. Solicitante/s: ACERINOX, S.A.. Clasificación: B07C5/10, B65H26/00, G01N21/88P, G01N21/88.
Especialmente concebido para realizar de forma totalmente automática la detección de manchas residuales de óxido (cascarilla residual) así como su clasificación en líneas de producción de laminados metálicos sin necesidad de detener la línea, la invención consiste en un bastidor o caja , dotada de medios de desplazamiento sobre la superficie de la lámina metálica a examinar, en cuyo seno se establece una cámara CCD de alta resolución, así como un equipo de iluminación de alta potencia y generador de luz difusa, cámara cuya señal de vídeo es enviada a un PC dotado de un software interno de procesamiento de las imágenes obtenidas que permite la detección y clasificación de las manchas residuales de óxido. El desplazamiento de la citada caja o bastidor esté controlado por un autómata programable , conectado igualmente al citado PC.
BANCO DE HOMOLOGACION DE ENGANCHES.
Sección de la CIP Física
(01/02/2009). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: G01M19/00, G01N3/36B, G01N3/36.
Banco de homologación de enganches, para dispositivos mecánicos de acoplamientos de vehículos de motor, sus remolques y su sujeción a dichos vehículos, llevándose a cabo ensayos de resistencia y de funcionamiento. En los dispositivos de acoplamiento se comprobará la resistencia mediante el ensayo dinámico (ensayo de resistencia). El ensayo dinámico se llevará a cabo con carga aproximadamente senoidal (alternativa o pulsátil), con el número de ciclos que resulte adecuado para el material, no debiéndose producir grietas ni fracturas. El banco comprende una estructura rígida que sustenta el cabezal de transmisión de movimientos al enganche, proporcionando mediante un servocilindro la fuerza en módulo y dirección indicada en la directiva 94/20/CE. El sistema también es capaz de controlar los movimientos y leer de los distintos sensores, a través de un computador central, que además hace de interfaz con el usuario.
SISTEMA MECANICO-ELECTRONICO PARA LA MEDICION POR LASER DEL ESPESOR DE LAMINAS EN MOVIMIENTO CON CORRECCION DE PERPENDICULARIDAD.
Sección de la CIP Física
(01/06/2007). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: G01B11/06.
Sistema mecánico-electrónico para la medición por láser del espesor de láminas en movimiento con corrección de perpendicularidad. Consiste en un cabezal en forma de "C", dos sensores láser y enfrentados, tres sensores sonar , y dispuestos en posición triangular y fijados al cabezal mediante soporte , autómata de control y medios mecánicos para el posicionamiento del cabezal según eje horizontal (x), eje vertical (y), eje rotacional (r) y eje angular (a), mediante los cuales se asegura la perpendicularidad del haz de los sensores láser y con respecto de la superficie del material cuyo espesor (e) se desea medir.
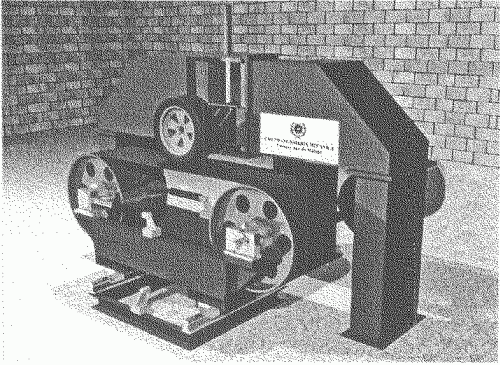
BANCO DE ENSAYO DINAMICO DE NEUMATICOS DE SUPERFICIE PLANA.
Sección de la CIP Física
(01/02/2006). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: G01M17/02.
Banco de ensayo dinámico de neumáticos de superficie plana, el cual permite simular y estudiar el comportamiento dinámico del neumático en condiciones operativas controlables y repetitivas en laboratorio. El banco se compone de una estructura rígida que sustenta el cabezal de transmisión de movimientos al neumático (ángulo de caída y deriva y desplazamiento vertical) y una banda de rodadura flexible de acero inoxidable, sobre la que se apoya el neumático, esta banda gira mediante unos tambores, uno fijo y otro móvil, con un sistema para la corrección de la banda, que evita la salida de está, el carro que soporta la banda está apoyado sobre unas guías lineales permitiendo el movimiento lateral, con lo cual sobre el neumático se pueden aplicar unas cargas verticales y laterales variables con el tiempo. El sistema también es capaz de controlar los movimientos y leer de los distintos sensores, a través de un computador central, que además hace de interfaz con el usuario.
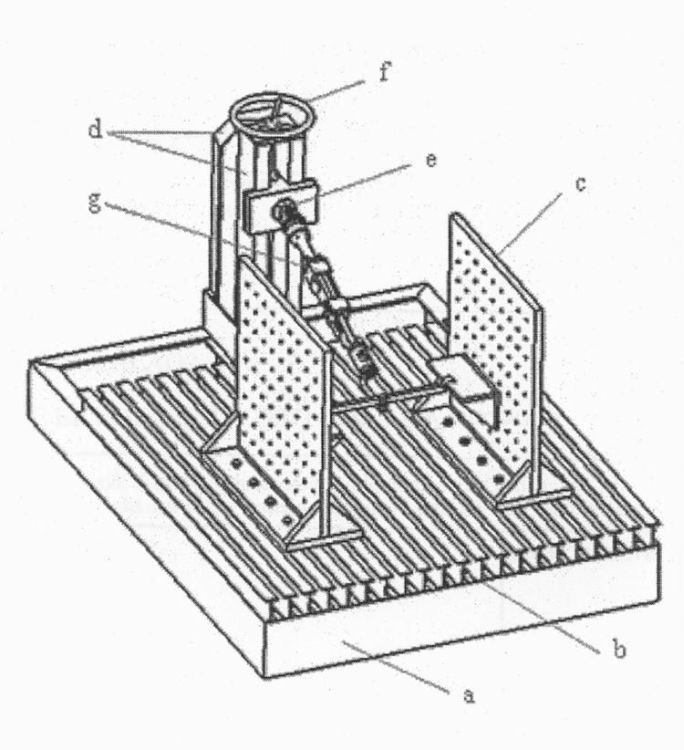
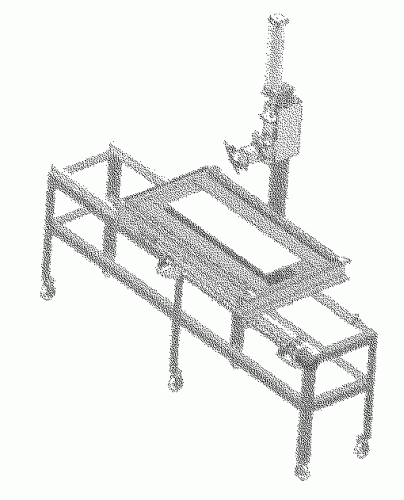
SISTEMA MEDIDOR DE LA DISTRIBUCION DE PRESIONES NORMALES Y DE LA GEOMETRIA DEL CONTACTO EN LA HUELLA DE CONTACTO DE NEUMATICOS CON SU PISTA DE RODADURA.
Sección de la CIP Física
(16/01/2006). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: G01M17/02, G01L17/00.
Sistema medidor de la distribución de presiones normales y de la geometría del contacto en la huella de contacto de neumáticos con su pista de rodadura. El sistema comprende una estructura soporte a modo de mesa sobre la que se instalan el resto de dispositivos. Sobre la mesa se dispone el marco soporte en el que se apoyará una plancha de cristal sobre la que rodará el neumático. Entre el neumático y la plancha de cristal se coloca una lámina de material plástico ajustado a las características del ensayo a realizar. El neumático es cargado mediante un sistema cilindro- pistón. El resto de dispositivos necesarios incluyen un motor eléctrico y guías de rodadura lineal para dotar al marco soporte de desplazamiento lineal así como tubos fluorescentes para la iluminación de las planchas de cristal y todo el sistema de adquisición de imágenes.
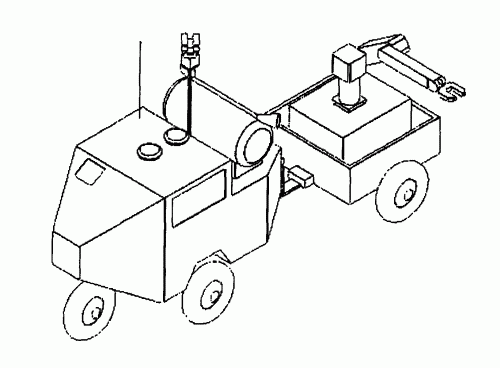
SISTEMA ROBOTIZADO PARA SERVICIO EN INVERNADEROS.
Secciones de la CIP Física Necesidades corrientes de la vida
(16/03/2005). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: G05D1/02, G06T1/00, A01B69/00, G08C21/00.
Sistema robotizado para servicio en invernaderos, caracterizado por una cabeza tractora autónoma, con capacidad sensorial y una estación para carga de pago, y un remolque también para carga de pago. El sistema puede portar diversos equipos necesarios para el trabajo en los invernaderos, como aparatos de fumigación, cámaras de inspección o brazos robot para recolección u otras tareas. El sistema puede moverse dentro del invernadero, bien autónomamente, gracias a un controlador y a sus sensores, entre los que puede contarse un sistema de posicionamiento global, bien según un plan establecido previamente, bien ser controlado remotamente por un operador humano con auxilio de cámaras de a bordo.
SISTEMA DE TELEOPERACION DE ROBOTS PARA RESECCION TRANSURETRAL DE LA PROSTATA.
Sección de la CIP Necesidades corrientes de la vida
(01/02/2005). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: A61B17/00.
Sistema de teleoperación de robots para resección transuretral de la próstata, capaz de mover el resector en respuesta a las órdenes del cirujano. El sistema consta de un robot manipulador de al menos cuatro grados de libertad dotado de un efector final que permite sujetar el resector, un controlador para el robot, y un manipulador maestro que reproduce la forma del resector o que permite engarzar en él un resector real. Opcionalmente, puede contar con un computador que haga de interfaz entre el robot y el manipulador maestro, si la capacidad del controlador del robot utilizado no es suficiente. Como medios alternativos para mover el brazo robot puede contarse con un sistema de reconocimiento de voz o un teclado.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}