9 inventos, patentes y modelos de CINQUIN, PHILIPPE
Dispositivo de membrana artificial biomimética.
(24/06/2019) Celula de combustible que comprende una carcasa y una membrana biomimetica artificial dispuesta dentro de la carcasa para formar dos camaras distintas, en donde
- cada camara esta destinada a contener un liquido de una composicion dada,
- la membrana biomimetica artificial comprende tres capas distintas:
• una membrana lipidica que comprende una pluralidad de moleculas lipidicas dispuestas en una capa;
• una membrana semipermeable de soporte para soportar la membrana lipidica; y
• una membrana de polielectrolito interpuesta entre la membrana semipermeable de soporte y la membrana lipidica;
en donde el combustible…
Sistema de formación de imágenes de visión múltiple para cirugía laparoscópica.
(05/06/2019) Sistema de formación de imágenes de visión múltiple para cirugía laparoscópica, que comprende:
- Un elemento tubular , teniendo dicho elemento tubular un eje longitudinal, un extremo distal y un extremo proximal;
- Un primer dispositivo de formación de imágenes que tiene un cuerpo longitudinal y un extremo activo para la adquisición de imágenes, estando adaptado el primer dispositivo de formación de imágenes para insertarse a través del elemento tubular , con el extremo activo proyectado del extremo distal y pudiendo el primer dispositivo de formación de imágenes moverse en el elemento tubular en traslación a lo largo del eje longitudinal y/o en rotación alrededor del eje longitudinal;
caracterizado porque comprende, además:
- Un…
Dispositivo de prevención de fugas urinarias.
Sección de la CIP Necesidades corrientes de la vida
(08/11/2017). Solicitante/s: Uromems. Clasificación: A61B5/11, A61F2/00, A61B5/20, A61B5/0488.
Dispositivo de prevención de fugas urinarias destinado a ser implantado en un paciente, que comprende:
- unos medios de compresión de la uretra del paciente,
- unos medios de mando electrónico para accionar los medios de compresión ,
caracterizado por que comprende además unos medios de medición de la actividad del paciente acoplados a los medios de mando , funcionando los medios de mando según un modelo predictivo de las fugas urinarias basado en la actividad del paciente, de manera que se anticipe una fuga urinaria eventual en función de la actividad medida del paciente.
PDF original: ES-2656137_T3.pdf
DETECCIÓN AUTOMÁTICA DE UNA HERRAMIENTA QUIRÚRGICA EN UNA IMAGEN PROPORCIONADA POR UN SISTEMA MÉDICO DE FORMACIÓN DE IMAGENES.
(25/01/2012) Dispositivo de detección de una herramienta quirúrgica en una imagen , pasando dicha herramienta quirúrgica por una incisión practicada a nivel de la piel o de un órgano de un paciente, comprendiendo el dispositivo:
un medio de memorización de parámetros de forma de la herramienta quirúrgica;
un medio de determinación de la posición de la proyección (O1, O2) de la incisión en el plano de la imagen (PI);
y un medio de análisis de la imagen para detectar, teniendo en cuenta los parámetros de forma y de la posición de la proyección de la incisión, unos puntos y/o rectas característicos (D1, D1', D2, D2', M1, M2, S1, S2) de la proyección de la herramienta quirúrgica sobre la imagen.
ACTIVACIÓN QUÍMICA DE UN ACCIONADOR O DE UN MOTOR OSMÓTICO.
(25/11/2011) Motor según la reivindicación 9, en el que el segundo medio de suministro comprende un recinto suplementario destinado a recibir un disolvente que contiene urea, conteniendo el recinto suplementario unas enzimas ureasa adaptadas para favorecer la oxidación de la urea para proporcionar unos iones amonio y dióxido de carbono
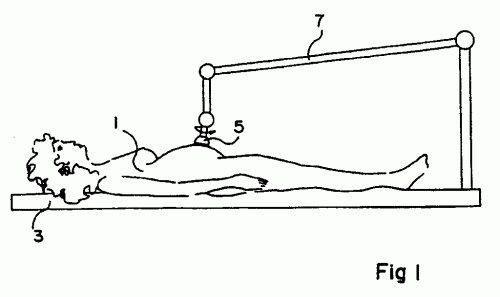
SISTEMA TELECONTROLABLE DE POSICIONAMIENTO SOBRE UN PACIENTE DE UN DISPOSITIVO DE OBSERVACION/INTERVENCION.
Sección de la CIP Necesidades corrientes de la vida
(16/06/2006). Ver ilustración. Solicitante/s: UNIVERSITE JOSEPH FOURIER. Clasificación: A61B8/00, A61B5/00, A61B19/00, A61B6/00.
Sistema telecontrolable de posicionamiento sobre un paciente de un dispositivo de observación y/o de intervención, que comprende: una montura a la que está conectado dicho dispositivo según un cierto número de grados de libertad; unos medios de conexión flexible , cada uno de los cuales está dispuesto entre la montura y un punto solidario del soporte del paciente o del propio paciente, estando unida dicha montura a dichos puntos solamente por dichos medios de conexión flexible sin elemento de guía rígido; unos medios telecontrolados para modificar la longitud/tensión de los medios de conexión; y unos medios de teleobservación del comportamiento del dispositivo.
PROCEDIMIENTO Y DISPOSITIVO PAPRA LA DETERMINACION PREOPERATIVA DE LOS DATOS DE LA POSICION DE PIEZAS DE ENDOPROTESIS.
Sección de la CIP Necesidades corrientes de la vida
(01/07/2003). Solicitante/s: AESCULAP AG & CO. KG. Clasificación: A61F2/30.
Se describe un proceso para la determinación preoperativa de datos de posicionamiento de partes de endoprótesis de una articulación central, con relación a los huesos que forman la articulación central. A fin de detectar la posición de los huesos en el cuerpo sin un proceso complejo, un punto de articulación exterior está determinado porque los huesos se desplazan alrededor de una articulación exterior situada en el extremo de ambos huesos, lejos de la articulación central, un punto de la articulación está determinado para cada hueso en la región de la articulación central, una dirección característica para ambos huesos está determinada interconectando los dos puntos de la articulación así detectados para cada hueso con una línea recta, y se determina la orientación de las partes de la endoprótesis con relación a esta dirección característica. Se describe también un dispositivo para poner en práctica este proceso.
PROCEDIMIENTO DE DETERMINACION DE LA POSICION DE UN ORGANO.
Sección de la CIP Necesidades corrientes de la vida
(16/05/2001). Solicitante/s: UNIVERSITE JOSEPH FOURIER. Clasificación: A61B8/08, A61B8/14.
LA PRESENTE INVENCION CONCIERNE A UN PROCESO DE DETERMINACION DE LA POSICION DE UN ORGANO DE UN PACIENTE EN RELACION A AL MENOS DOS DISPOSITIVOS DE FORMACION DE IMAGEN. EL PRIMER DISPOSITIVO DE FORMACION DE IMAGEN ES UN DISPOSITIVO QUE SUMINISTRA UNA IMAGEN DE PUNTOS DE LA SUPERFICIE DEL ORGANO O DE UNA REGION CUTANEA DEL PACIENTE. EL PROCESO COMPRENDE LAS ETAPAS QUE CONSISTEN EN DETERMINAR LA POSICION DEL PRIMER DISPOSITIVO EN RELACION AL REFERENCIAL DEL SOPORTE DEL PACIENTE: EFECTUAR AL MENOS UNA TOMA DE VISTA CON EL PRIMER DISPOSITIVO, DE DONDE RESULTA QUE SE OBTIENE UNA PRIMERA IMAGEN CORRESPONDIENTE A UNA NUBE DE PUNTOS DE LA SUPERFICIE DEL ORGANO O DE LA REGION CUTANEA; TOMAR AL MENOS UNA IMAGEN TRIDIMENSIONAL DEL ORGANO Y DE SU SUPERFICIE O DE LA SUPERFICIE DE LA REGION CUTANEA CON LA AYUDA DE UN SEGUNDO DISPOSITIVO DE FORMACION DE IMAGEN; Y FUSIONAR LAS PRIMERA Y SEGUNDA IMAGENES.
PROCESO DE DETERMINACION DEL PUNTO DE ANCLAJE FEMORAL DE UN LIGAMENTO CRUZADO DE LA RODILLA.
Secciones de la CIP Necesidades corrientes de la vida Física
(16/10/1998). Solicitante/s: UNIVERSITE JOSEPH FOURIER. Clasificación: A61B19/00, G01B11/02.
LA PRESENTE INVENCION CONCIERNE A UN PROCESO DE DETERMINACION DE LA POSICION DE UN PUNTO F1 DE UN FEMUR EN RELACION A UN PUNTO T1 DE UNA TIBIA TAL QUE LA DISTANCIA ENTRE F1 Y T1 SEA SENSIBLEMENTE INVARIANTE. ESTE PROCESO HACE USO DE UN SISTEMA DE REFERENCIA TRIDIMENSIONAL DE TRIPLETES DE ELEMENTOS EMISORES QUE COMPRENDEN EN PARTICULAR UN ANOTADOR REFERENCIABLE POR ESTE SISTEMA Y COMPRENDE LAS ETAPAS QUE CONSISTEN EN UNIR UN PRIMER TRIPLETE A LA TIBIA: ANOTAR CON EL ANOTADOR LA POSICION DEL PUNTO T1 Y REFERENCIAR ESTA POSICION EN RELACION A LA DEL PRIMER TRIPLETE; ANOTAR CON EL ANOTADOR LAS POSICIONES DE UN CONJUNTO DE SEGUNDO PUNTOS (FI) SITUADOS EN UNA ZONA (A) DEL FEMUR DONDE ES SUSCEPTIBLE DE ENCONTRARSE EL PUNTO INVARIANTE; CALCULAR LAS DISTANCIAS (DI) ENTRE EL PUNTO T1 Y CADA UNO DE LOS PUNTOS FI; DESPLAZAR LA TIBIA EN RELACION AL FEMUR Y CALCULAR LAS VARIACIONES DE DICHAS DISTANCIAS; Y SELECCIONAR EL PUNTO F1 PARA EL CUAL DICHA DISTANCIA ES INVARIANTE.
{kind=link}