16 patentes, modelos y diseños de SCHNEIDER AUTOMATION
Procedimiento y dispositivo de configuración de un módulo de automatismo en una red TCP/IP.
(07/05/2013) Procedimiento de configuración de un módulo de automatismo en una red TCP/IP a la cual estáconectado también al menos un equipo de automatismo , comprendiendo el procedimiento de configuración deforma sucesiva las siguientes etapas:
- una etapa preliminar de atribución (A) de un nombre de aplicación único en la red TCP/IP para elmódulo de automatismo ;
- una etapa de direccionamiento (B) en la cual el módulo de automatismo emite hacia un servidor DHCP una petición de solicitud de dirección en la red TCP/IP que contiene el nombre de aplicación del módulo de automatismo y de acuerdo con el protocolo DHCP, recibiendo el módulo de automatismo del servidor DHCP una respuesta a la petición de solicitud de dirección que contiene undireccionamiento IP así como…
BLOQUE DE FUNCION WEB EN UN EQUIPO DE AUTOMATISMO.
(25/05/2010) Sistema de comunicación de un equipo de automatismo en una red TCP/IP , cuyo equipo de automatismo controla una aplicación de automatismo desarrollando un programa aplicación escrito en uno o varios lenguajes conformes a la norma IEC1131-3 donde el sistema de comunicación comprende:
- una función servidor WEB implementada en el interior del programa aplicación ,
- medios de intercambio que comprenden al menos un bloque función WEB de recepción y al menos un bloque función WEB de emisión que están integrados en el programa aplicación y que interactúan con el programa aplicación ,
- una interfaz HTTP en el equipo de automatismo capaz de conducir los mensajes procedentes de la red TCP/IP a un bloque función WEB de recepción identificado por una dirección…
EQUIPO DE AUTOMATISMO CONECTADO DIRECTAMENTE A UNA RED DE COMUNICACIO N TCP/IP.
Secciones de la CIP Electricidad Física
(01/11/2007). Ver ilustración. Inventor/es: GENIN, JEAN-JACQUES, GODICKE, THOMAS, GORISSE, FRANCOIS. Clasificación: H04L29/06, G05B19/418.
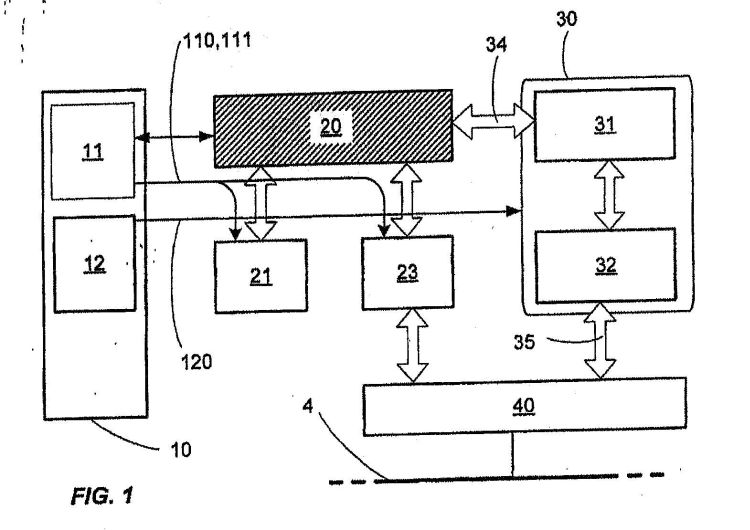
Equipo de automatismo que comprende una unidad central que posee al menos una memoria que comprende un sistema de procesamiento en tiempo real y un programa de aplicación encargado de efectuar las funciones de control o de comando en una aplicación de automatismo, caracterizado porque el equipo de automatismo incluye un controlador de red TCP/IP que está integrado directamente en la unidad central sin pasar por una vía de fondo de cesta, comprendiendo el sistema de procesamiento de la unidad central un módulo de gestión de las comunicaciones sobre la red TCP/IP y una tarea de servidumbre encargada de someter la ejecución del módulo de gestión de las comunicaciones a las características de la aplicación de automatismo para no perturbar el funcionamiento del programa de aplicación.
DISPOSITIVO Y CAJA PARA ACOPLAR A UNA RED LOCAL.
Sección de la CIP Electricidad
(16/06/2007). Inventor/es: PELLEGRINO, MICHAEL DOMINIQUE, PIGNAULT, BERNARD. Clasificación: H04L12/40, H04L12/44.
Dispositivo de acoplamiento asociado a una estación , destinado a acoplar dicha estación a una red local de transmisión de datos de tipo Ethernet que une al menos tres estaciones unas a continuación de las otras, dicha red local teniendo la topología de un bus pasivo y teniendo un soporte físico que comprende un cable de enlace que comprende dos pares simétricos , caracterizado por el hecho de que el dispositivo de acoplamiento no comprende medios de regeneración de las señales transmitidas en la red local, y comprende un circuito que efectúa la puesta en paralelo de los dos pares simétricos , el circuito siendo adaptado para proporcionar un valor de impedancia del soporte físico formado por los dos pares de aproximadamente 50 Ohms.
SISTEMA DE COMUNICACION PARA UN EQUIPO DE AUTOMATISMO BASADO EN EL LENGUAJE WSDL.
(16/08/2006) Sistema de comunicación en una red IP entre un equipo de automatismo que comprende al menos una unidad de tratamiento capaz de ejecutar al menos un programa para proporcionar funciones de automatismo y uno o varios aparatos distantes que ejecutan una o varias aplicaciones informáticas, caracterizado por el hecho de que: el sistema de comunicación es conforme al lenguaje WSDL (Web Services Description Language) con el objetivo de proporcionar a un aparato distante funciones de vigilancia, de visualización, de control; de configuración o de programación del equipo de automatismo , el sistema de comunicación utiliza al menos un documento de descripción de…
PROCEDIMIENTO DE PROGRAMACION DE UNA APLICAICON DE AUTOMATISMO.
(16/07/2006) Procedimiento de programación de un programa de aplicación de automatismo en una estación de programación de un equipo de automatismo, que comprende: - una etapa de definición de una pluralidad de objetos de tipo estructurado que representa cada uno un canal de entradas-salidas de un módulo de entradas-salidas del equipo de automatismo, la definición de cada tipo estructurado comprendiendo al menos un elemento característico que corresponde a una información de entradas-salidas intercambiada entre el módulo de entradas-salidas y el programa de aplicación y para cada elemento la dirección topológica relativa de la información de entradas-salidas, - una etapa de escritura del programa de aplicación , declarando variables simbólicas…
UN BUS INTERNO DE AUTOMATIZACION QUE SOPORTA EL PROTOCOLO TCP/IP.
Secciones de la CIP Electricidad Física
(01/03/2006). Ver ilustración. Inventor/es: GENIN, JEAN-JACQUES, GODICKE, THOMAS, GORISSE, FRANCOIS. Clasificación: H04L29/06, H04L12/40, G05B19/42.
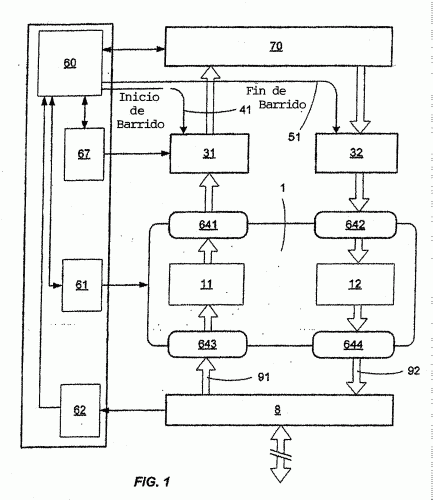
Sistema de comunicación en un autómata programable modular que comprende varios módulos inteligentes dotados de una unidad de tratamiento propia y que comprende un bus de comunicación interno que permite que los módulos del autómata programable comuniquen entre ellos, caracterizado porque para comunicar según el protocolo de comunicación TCP/IP en el bus de comunicación interno , un módulo inteligente del autómata programable posee una dirección IP propia y una pila TCP/IP ejecutable por la unidad de tratamiento del módulo inteligente , y porque el bus de comunicación interno posee varios canales de comunicación separados que permiten hacer circular simultáneamente tramos según el protocolo TCP/IP con tramos según otros protocolos.
SISTEMA DE AUTOMATISMO DISTRIBUIDO.
(01/03/2006) La presente invención se refiere a un sistema de automatismo distribuido que comprende un autómata programable (API-1), conectado a autómatas programables (API-2, API-3, API-4) y equipado con una unidad central (UC1) y acopladores (CS1) que comunican mediante la barra ómnibus del fondo de panel con la mencionada unidad central, estando unido uno de los acopladores (CS1) por una barra ómnibus (B) a uno de los equipos asociados (P, SAP, C, M) caracterizado por el hecho de que el acoplador (CS1) se puede comunicar gracias a una función servidor con los equipos asociados (P, C, M, SAP) bajo el protocolo TCP/IP y está provisto de una memoria de masa (MS) que comprende por un lado objetos soporte lógico de la información denominados "con variables autómatas" (OV) que generan el acceso a las variables…
EQUIPO DE AUTOMATISMO PROVISTO DE UN ENLACE TIPO USB.
Sección de la CIP Física
(01/03/2006). Ver ilustración. Inventor/es: GENIN, JEAN-JACQUES. Clasificación: G05B19/05.
Equipo de automatismo que ejecuta un programa de aplicación con el fin de efectuar una o varias funciones de control o de comando en una aplicación de automatismo, que incluye una memoria viva y un conectador de tipo USB unido mediante un circuito de direccionamiento de bus USB a un bus interno del equipo de automatismo, caracterizado porque incluye una tarea lógica encargada de someter el flujo de comunicaciones intercambiadas por el conectador USB entre el equipo de automatismo y equipos remotos, a las características del programa de aplicación ejecutado en el equipo de automatismo, y porque la citada tarea lógica aprovecha una primera zona de memoria variable de la memoria viva , declarada como pila de recepción de tramas de entrada y como pila de recepción de mensajes de salida, estando el tamaño de la primera zona de memoria definido por construcción para la pila de recepción de tramas de entrada y por parametrado para la pila de recepción de mensajes de salida.
DISPOSITIVO DE CONEXION ELECTRICA DE APARATOS O MODULOS ELECTRONICOS.
(01/10/2005) Dispositivo de conexión eléctrica de, al menos, dos aparatos o módulos electrónicos (30, 30') constituido por un cable de unión multiconductor que enlaza los aparatos entre sí, una primera extremidad del cual comprende un conectador de tipo 2, moldeado sobre el cable , comprendiendo el otro extremo del cable una caja de derivación incorporada, por ejemplo moldeada sobre el cable , recibiendo esta caja de derivación dos conectadores: un primer conectador de tipo 1 para permitir la conexión a un dispositivo de conexión adyacente (10') y un segundo conectador para permitir la conexión con un conectador de un aparato , garantizando así la caja de derivación la continuidad, hilo a hilo del conjunto de conductores del cable , y caracterizado por el hecho de que el segundo conectador de la caja de derivación es…
SISTEMA DE TELECARGA Y DE TELEMANTENIMIENTO DE UNA TARJETA ELECTRONICA.
Sección de la CIP Física
(16/05/2005). Ver ilustración. Inventor/es: OLLIVE, MICHEL, CARPINE, ALAIN, CHAPIER, PASCAL, MOLINARD, JEAN-LUC. Clasificación: G05B19/042, G05B23/02.
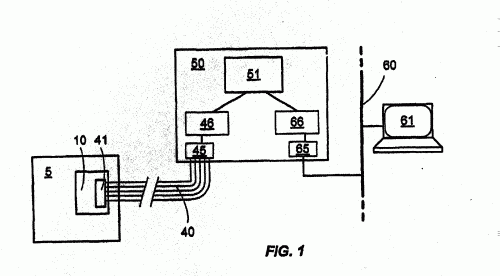
Sistema de telecarga y de telemantenimiento de una tarjeta electrónica perteneciente a un equipo de automatismo y que comprende, al menos, una unidad de tratamiento , una línea común de datos interna y un controlador de recursos dotado de uno o más registros de interconexión JTAG accesibles para lectura y grabación por un servidor JTAG exterior al equipo de automatismo, por medio de señales que responden a la norma JTAG, caracterizado por el hecho de que el controlador de recursos contiene una máquina de estado que es capaz de interpretar y ejecutar las instrucciones almacenadas en memoria en la o en las interconexiones JTAG de registros y que es susceptible de acceder a los recursos (21a, 21b, 21i) gestionados por el controlador de recursos con el fin de realizar la telecarga y el telemantenimiento de la tarjeta electrónica sin intervención de la unidad de tratamiento de la tarjeta electrónica.
SISTEMA DE AUTOMATISMO REDUNDANTE.
(01/09/2004) Sistema de automatismo redundante que comprende un conjunto de robots con redundancia (AR) constituido por un par de robots (AP-A, AP-B) cada uno equipado con dos interruptores de comunicación (CC1-A, CC2-A y CC1- B, CC2-B), el primer interruptor (CC1-A) del primer robot viene conectado al primer interruptor (CC1-B) del segundo robot por medio de una primera red Ethernet (BE1), el segundo interruptor (CC2-A) del primer robot viene conectado al segundo interruptor (CC2-B) del segundo robot por una segunda red Ethernet (BE2) que los une a por lo menos un equipo remoto (S), caracterizado por el hecho de que cada uno de los robots…
PROCEDIMIENTO DE CARGA DE UN SISTEMA OPERATIVO.
Sección de la CIP Física
(16/07/2003). Inventor/es: GODICKE, THOMAS, IANNI, GIOVANNI. Clasificación: G06F9/445.
METODO DE CARGA DE UN SISTEMA OPERATIVO APLICADO A UN EQUIPO DE TRATAMIENTO DE LA INFORMACION FORMADO POR UNA FUENTE DE ALIMENTACION CON RESERVA DE ENERGIA, UN MICROPROCESADOR, UNA MEMORIA DE TIPO FLASH EPROM QUE SE PUEDE BORRAR, UNA MEMORIA RAM PROTEGIDA, UN DISPOSITIVO DETECTOR DE CORTES DE LA ALIMENTACION ELECTRICA Y UNA CONEXION CON UNA CONSOLA O CON UNA MEMORIA DE GRAN CAPACIDAD PARA ACTUALIZAR EL SISTEMA OPERATIVO; SE CARACTERIZA PORQUE DURANTE LA ACTUALIZACION, EL SISTEMA OPERATIVO TRANSFIERE EL PROGRAMA DE ARRANQUE QUE SE CONSERVA EN LA RAM PROTEGIDA Y A CONTINUACION EJECUTA DICHO PROGRAMA DE ARRANQUE CONSERVADO EN LA RAM, QUE BORRA LA MEMORIA FLASH EPROM Y A CONTINUACION CARGA, A PARTIR DE LA CONEXION CON LA CONSOLA O CON LA MEMORIA DE GRAN CAPACIDAD, EL NUEVO SISTEMA OPERATIVO EN LA MEMORIA FLASH EPROM.
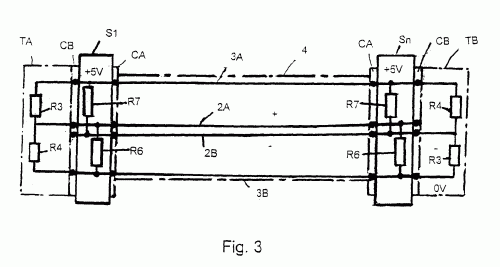
BUS DE COMUNICACION NUMERICO ASEGURANDO LA CONEXION DE MODULOS ELECTRONICOS.
Sección de la CIP Física
(16/04/2003). Ver ilustración. Inventor/es: PIGNAULT, BERNARD, ING. Clasificación: G06F13/40.
LA INVENCION SE REFIERE A UN BUS DE COMUNICACION DIGITAL ENTRE MODULOS ELECTRONICOS (SI, SN) CONSTITUIDO POR AL MENOS UN PAR DE LINEAS DE TRANSMISION DE DATOS (2A, 2B) Y ACABADO EN TERMINACIONES DE LINEAS (TA, TB), Y SE CARACTERIZA POR QUE VA PROVISTO, POR EJEMPLO EN LAS DOS TERMINACIONES DE LINEA (TA, TB), DE COMPONENTES (R6, R7, R3, R4) QUE IMPONEN LA TRANSMISION CON POLARIZACION E INVIERTEN LA POLARIZACION TAN PRONTO UNA DE LAS TERMINACIONES DE LINEA FALTA O NO ESTA CONECTADA AL BUS, O EL BUS ESTA ABIERTO.
SISTEMA DE AUTOMATISMO PROTEGIDO.
(16/09/2002) LA PRESENTE INVENCION SE REFIERE A UN SISTEMA DE AUTOMATISMO PROTEGIDO CONSTITUIDO POR DOS AUTOMATAS (PLC-A, PLC_B) EQUIPADOS POR UNA PARTE DE ACOPLADORES DE REDUNDANCIA (CR-A Y CR-B) CONECTADOS UNO A OTRO POR UNA CONEXION INTERCADENA (LIC) Y POR OTRA PARTE ACOPLADORES ANALOGICOS (CA-A Y CA-B) QUE RECIBEN CADA UNO UNA DE LAS DOS VIAS DE ENTRADA (A, B) DE UNA MISMA SEÑAL ANALOGICA PROPORCIONADA POR UN DETECTOR O APARATO SIMILAR, Y CARACTERIZADO POR EL HECHO DE QUE CONSISTE EN REALIZAR UN MUESTREO FISICO DE LAS SEÑALES DE ENTRADA EN LOS ACOPLADORES ANALOGICOS (CA-A, CA-B), EN INTERCAMBIARLOS CON LA MEMORIA (MA) DE LOS AUTOMATAS, EN TOMAR, EN LA MEMORIA (MA), LOS VALORES MUESTREADOS A LA FRECUENCIA DE MUESTREO…
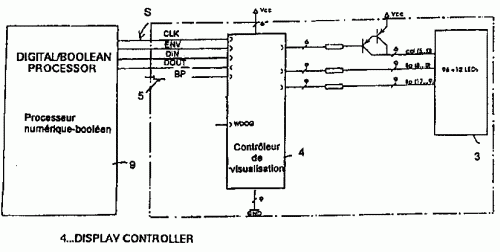
DISPOSITIVO DE VISUALIZACION PARA AUTOMATA PROGRAMABLE.
Sección de la CIP Física
(01/08/1999). Ver ilustración. Inventor/es: CARPINE, ALAIN, MEURLAY, ALAIN, CHABERT, JEAN-MARIE, GODICKE, ANTONIA, GOSSEAUME, CHRISTIAN. Clasificación: G09F9/33.
LA PRESENTE INVENCION SE REFIERE A UN DISPOSITIVO DE VISUALIZACION MONTADO SOBRE LA CARA DELANTERA DE UN CONTROLADOR EQUIPADO CON MODULOS O ACOPLADORES DE ENTRADAS SE CARACTERIZA PORQUE ESTA CONSTITUIDO POR UNA MATRIZ DE DIODOS CONTROLADOS POR UN CIRCUITO INTEGRADO DE CONTROL DE VISUALIZACION CONECTADO POR UN ENLACE EN SERIE (S) AL PROCESADOR DIGITAL.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}