8 patentes, modelos y diseños de KABUSHIKI KAISHA SANKYO SEIKI SEISAKUSHO
MECANISMO DE SOPORTE DE CABEZA MAGNETICA.
(01/05/2000) UNA CABEZA MAGNETICA 4 ES EMPUJADA EN LA DIRECCION DE LA FLECHA D PARA QUE DE CONTRA LA SUPERFICIE DE REGISTRO MAGNETICA 2A DE UN MEDIO DE REGISTRO Y ES SOPORTADA DE FORMA OSCILANTE EN LAS DIRECCIONES DE LA FLECHA X PERPENDICULARES A LAS DIRECCIONES DE LA FLECHA Z EN LAS QUE SE MUEVE EL MEDIO DE REGISTRO, SIGUIENDO ASI LA SUPERFICIE DE REGISTRO MAGNETICO 2A. DEL GRUPO QUE CONSISTE EN UN SOPORTE 23 Y UNAS PALANCAS OSCILANTES 20 Y 21 QUE QUEDAN SOPORTADAS CON LA AYUDA DE UNA SECCION DE ACOPLAMIENTO, EL SOPORTE 23 SOPORTA DE FORMA OSCILANTE LA CABEZA MAGNETICA 4. LAS PALANCAS OSCILANTES 20 Y 21 QUEDAN SOPORTADAS DE FORMA OSCILANTE SOBRE UNOS BASTIDORES 10A Y 18. LA LONGITUD DE LA DISTANCIA DEL FULCRO INTEROSCILANTE L2 ENTRE LA SECCION DE ACOPLAMIENTO Y LA CABEZA…
UN APARATO DE GRABACION-REPRODUCCION MAGNETICA.
Sección de la CIP Física
(16/07/1986). Clasificación: G11B19/20.
APARATO PARA GRABAR Y REPRODUCIR MAGNETICAMENTE, DE PEQUEÑAS DIMENSIONES. CONSTA DE: UN BLOQUE DE CABEZA MAGNETICA QUE TIENE UN BORDE LATERAL , UNA PRIMERA SUPERFICIE DE REFERENCIA , Y UN CUERPO DE BLOQUE DOTADO CON UNA CABEZA MAGNETICA , UNA CABEZA DE BARRIDO , UN BRAZO ELASTICO CON UNA PORCION DE ENGANCHE Y UNA PORCION DESLIZANTE ; UNA PORCION DE CREMALLERA QUE ENCAJA EN UN REBAJE , LLEVA UN AGUJERO CON UN PIÑON DE CREMALLERA Y TIENE UNA PORCION ESCALONADA Y UNA PORCION DE CONTACTO DESLIZANTE ; UN CORDON DE ARROLLAMIENTO ; UN MIEMBRO DE CAMBIO DE MODO . SE UTILIZA EN JUGUETERIA.
UN APARATO PARA CONTROLAR LOS MOVIMIENTOS Y LAS POSICIONES DE TRABAJO DE UN ROBOT INDUSTRIAL.
Sección de la CIP Técnicas industriales diversas y transportes
(16/11/1983). Clasificación: B25J13/00.
APARATO DE CONTROL DE ROBOT INDUSTRIAL.CONTROLA EL MOVIMIENTO DE UN BRAZO DE ROBOT CON RESPECTO A UNA PIEZA TRANSPORTADA EN UNA BANDEJA QUE DESCIENDE POR UNA CADENA DE PRODUCCION, EN EL QUE LA POSICION DEL BRAZO DEL ROBOT SE COMPENSA SEGUN LA POSICION DE LA PIEZA. UNA MEMORIA DE POSICION DE REFERENCIA MEMORIZA DICHA POSICION DE LA BANDEJA O PIEZA. UN DETECTOR DE POSICION INDICA LA POSICION EN QUE SE SUJETA LA BANDEJA O PIEZA A LO LARGO DE LA CADENA DE MONTAJE. SE UTILIZA LA DIFERENCIA ENTRE LAS SALIDAS DE LA MEMORIA DE POSICION DE REFERENCIAY EL DETECTOR DE POSICION PARA CORREGIR UN VALOR MEMORIZADO EN UNA MEMORIA DE POSICION DE TRABAJO PARA FACILITAR ASI LOS DATOS DE SALIDA QUE CONTROLAN EL MOVIMIENTO DEL BRAZO DEL ROBOT.
APARATO DE CONTROL PARA ROBOT INDUSTRIAL.
Sección de la CIP Física
(16/08/1983). Clasificación: G05B19/405.
METODO Y APARATO DE CONTROL PARA ROBOT INDUSTRIAL. EL APARATO CONSTA DE UNA UNIDAD DE PROGRAMACION QUE INCLUYE UN DISPOSITIVO DE ENTRADA PARA INTRODUCIR LOS DATOS DE PROGRAMA, UN PROCESADOR ARITMETICO DE EDICION DE PROGRAMA, UNA MEMORIA DE TIPO RAM , UNA MEMORIA EXTERNA , UNA UNIDAD DE PRESENTACION Y UN CIRCUITO DE COMUNICACION ; Y DE UNA UNIDAD DE CONTROL DE ROBOT QUE INCLUYE UN CIRCUITO DE COMUNICACION , UNA PLURALIDAD DE MEMORIAS DE PROGRAMA DE TRABAJO QUE ALMACENAN UNA PLURALIDAD DE PROGRAMAS DE TRABAJO CALCULADOS, UNA UNIDAD SELECTORA , UNA UNIDAD DE CONTROL DE FUNCIONAMIENTO DE ROBOT Y UN CIRCUITO DE REGLAJE DE MODALIDAD QUE FIJA LA MODALIDAD DE FUNCIONAMIENTO DESEADA.
UN PROCEDIMIENTO DE MEDICION DE PUNTOS PARA UN ROBOT.
Sección de la CIP Técnicas industriales diversas y transportes
(16/06/1983). Clasificación: B25J9/18.
PROCEDIMIENTO DE MEDICION DE PUNTOS PARA UN ROBOT. CONSTA DE UNA UNIDAD PROGRAMADORA Y UNA UNIDAD DE CONTROL . LA UNIDAD PROGRAMADORA INCLUYE UN TECLADO , UNA UNIDAD CENTRAL DE PROCESO , UNA MEMORIA , UNA UNIDAD DE VISUALIZACION , UNA IMPRESORA Y UN CIRCUITO DE COMUNICACION . LA UNIDAD DE CONTROL SE COMPONE DE UN CIRCUITO DE COMUNICACION , UNA MEMORIA , UNA UNIDAD SELECTORA , UN CIRCUITO DE CONTROL Y OTRO DE ENTRADAS Y SALIDAS , UN CIRCUITO DE ACCIONAMIENTO Y OTRO DE POSICION DE MODOS.
UN APARATO DE CONTROL DEL FUNCIONAMIENTO DE UN ROBOT INDUSTRIAL.
Sección de la CIP Física
(01/06/1983). Clasificación: G05B19/407.
APARATO DE CONTROL DEL FUNCIONAMIENTO DE UN ROBOT INDUSTRIAL. COMPRENDE UNA PLURALIDAD DE MEMORIAS OPERATIVAS PARA MEMORIZAR LOS PROGRAMAS OPERATIVOS COMPLETOS COPILADOS POR UN PROGRAMADOR SEPARADO, UNA MEMORIA DE CONFIGURACIONES DE LA VELOCIDAD , UN GENERADOR DE SEÑALES DE CAMBIO QUE OBEDECE A UN PARAMETRO DEL ROBOT O A UN CONMUTADOR DE CAMBIO MANUAL, Y UN CIRCUITO DE CAMBIO PARA SELECCIONAR LA VELOCIDAD OPTIMA COMO RESPUESTA A LA SEÑAL.
"UN DISPOSITIVO REGULADOR DE LA VELOCIDAD PARA UNA CAJA DE MUSICA".
Sección de la CIP Técnicas industriales diversas y transportes
(01/05/1983). Clasificación: B41N1/14.
DISPOSITIVO REGULADOR DE LA VELOCIDAD PARA UNA CAJA DE MUSICA. EL REGULADOR DE LA VELOCIDAD CONSTA DE UN TORNILLO SIN FIN ACCIONADO POR UN TREN DE ENGRANAJES, UN EJE DE TORNILLO SIN FIN , UN ROTOR SITUADO EN EL EJE ANTERIORMENTE MENCIOANDO, MEDIANTE CONEXIONES QUE PUEDEN SOMETERSE A UNA DEFORMACION ELASTICA Y UN ELEMENTO DE FRENO CAPAZ DE DESLIZARSE EN EL ROTOR.
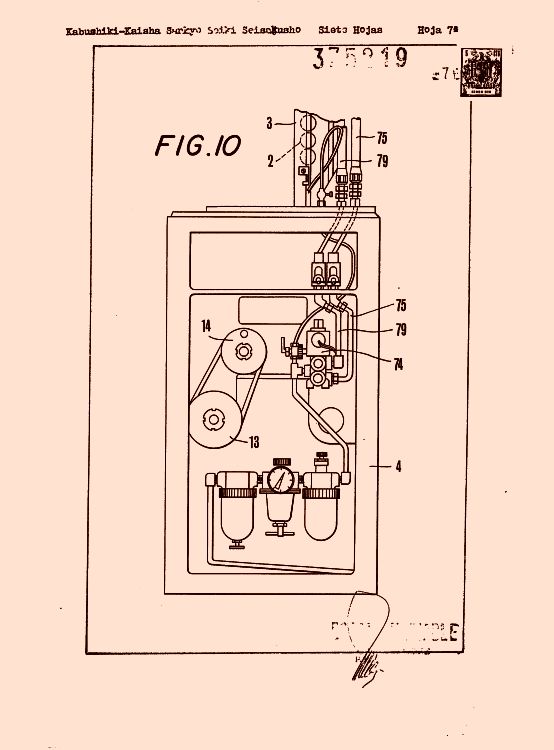
MAQUINA PARA APLICAR MATERIAL DE JUNTA ESTANCA PARA TAPONES CORONA Y SEMEJANTES.
Sección de la CIP Técnicas industriales diversas y transportes
(01/03/1972). Ver ilustración. Clasificación: B21D51/46, B21D51/00.
Resumen no disponible.
{kind=link}