MÉTODO Y SISTEMA PARA COMPENSAR ABERRACIONES ÓPTICAS EN UN TELESCOPIO.
Método y sistema para compensar aberraciones ópticas en un telescopio.
El método está aplicado a un telescopio donde el elemento receptor de un haz primario es un dispositivo de adquisición de imágenes (3), y comprende utilizar un algoritmo sin sensor de procesamiento de imágenes para:
a) detectar unas aberraciones ópticas que afectan al foco primario, mediante el análisis de las imágenes adquiridas por el dispositivo de adquisición de imágenes (3),
b) calcular y generar unos primeros valores de corrección posicionales, mediante el procesamiento de los valores de las aberraciones ópticas detectadas,y
comprende también una etapa c) consistente en mover, de manera controlada, al dispositivo de adquisición de imágenes (3) aplicando unas señales de control adecuadas generadas a partir de dichos primeros valores de corrección posicionales.
El sistema está adaptado para implementar el método propuesto.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201001030.
Solicitante: UNIVERSITAT POLITECNICA DE CATALUNYA.
Nacionalidad solicitante: España.
Inventor/es: ROYO ROYO,SANTIAGO, SUC,Vincent.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G02B23/06 FISICA. › G02 OPTICA. › G02B ELEMENTOS, SISTEMAS O APARATOS OPTICOS (G02F tiene prioridad; elementos ópticos especialmente adaptados para ser utilizados en los dispositivos o sistemas de iluminación F21V 1/00 - F21V 13/00; instrumentos de medida, ver la subclase correspondiente de G01, p. ej. telémetros ópticos G01C; ensayos de los elementos, sistemas o aparatos ópticos G01M 11/00; gafas G02C; aparatos o disposiciones para tomar fotografías, para proyectarlas o para verlas G03B; lentes acústicas G10K 11/30; "óptica" electrónica e iónica H01J; "óptica" de rayos X H01J, H05G 1/00; elementos ópticos combinados estructuralmente con tubos de descarga eléctrica H01J 5/16, H01J 29/89, H01J 37/22; "óptica" de microondas H01Q; combinación de elementos ópticos con receptores de televisión H04N 5/72; sistemas o disposiciones ópticas en los sistemas de televisión en colores H04N 9/00; disposiciones para la calefacción especialmente adaptadas a superficies transparentes o reflectoras H05B 3/84). › G02B 23/00 Telescopios o lentes de aproximación, p. ej. gemelos (telescopios de medida G01B 9/06 ); Periscopios; Instrumentos para ver el interior de cuerpos huecos (instrumentos de diagnóstico A61B ); Visores (objetivos G02B 9/00, G02B 11/00, G02B 15/00, G02B 17/00; oculares G02B 25/00 ); Apuntado óptico o aparatos de mira (aspectos no ópticos de apuntado de armas o de aparatos de mira F41G). › que tiene una acción de enfoque, p. ej. espejo parabólico.
- G02B26/08 G02B […] › G02B 26/00 Dispositivos o sistemas ópticos que utilizan elementos ópticos móviles o deformables para controlar la intensidad, el color, la fase, la polarización o la dirección de la luz, p. ej. conmutación, apertura de puerta o modulación (elementos móviles de dispositivos de iluminación para el control de la luz F21V; dispositivos o sistemas especialmente adaptados para medir las características de la luz G01J; dispositivos o sistemas cuyo funcionamiento óptico se modifica por el cambio de las propiedades ópticas del medio que constituyen estos dispositivos o sistemas G02F 1/00; control de la luz en general G05D 25/00; control de las fuentes de luz H01S 3/10, H05B 39/00 - H05B 47/00). › para controlar la dirección de la luz (en guías de luz G02B 6/35).
Fragmento de la descripción:
Método y sistema para compensar aberraciones ópticas en un telescopio.
Sector de la técnica La presente invención concierne, en un primer aspecto, a un método para compensar aberraciones ópticas en un telescopio, y más particularmente a un método que comprende llevar a cabo dicha compensación de aberraciones ópticas mediante el desplazamiento controlado de un dispositivo de adquisición de imágenes.
Un segundo aspecto de la invención concierne a un sistema capaz de implementar el método propuesto por el primer aspecto.
Estado de la técnica anterior
Existen sistemas aplicados a distintas clases de telescopios, profesionales y amateur, para compensar diversas clases de aberraciones, en algunos casos provocadas por flexiones mecánicas y en otros por diferentes tipos de aberraciones ópticas, en general de bajo orden.
A día de hoy, algunos sistemas usados por observatorios astronómicos profesionales han sido adaptados y democratizados para telescopios de dimensiones más reducidas de tipo amateur. Algunos ejemplos de tales adaptaciones son los siguientes:
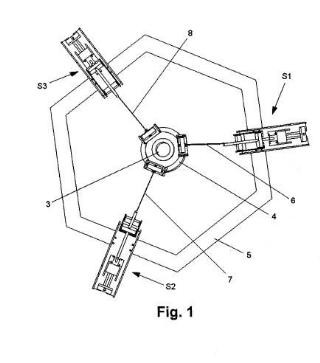
-“Bisque software”: Propone implementar un modelo de apuntado, o “tpoint” en la interfaz de sus sistemas de control vía el software “thesky”. El “tpoint” permite modelar las aberraciones de flexiones mecánicas y corregir la posición de la montura dándole un desplazamiento, u “offset”, dependiendo del resultado previo. Este sistema permite modelar y corregir el apuntado del telescopio sin tener en cuenta ni corregir las aberraciones ópticas incluidas por las flexiones del telescopio. Tampoco permite ajustar o actuar sobre el alineamiento óptico del telescopio.
-“Maxim”: Propone un sistema similar al de “bisque software” basado en ecuaciones más simplificadas, pero limitado también solamente a modelizaciones mecánicas.
-“Meade”: En sus modelos de telescopios más avanzados propone un sistema de colimación electrónica que permite mover uno de los espejos sobre dos ejes para asegurar el alineamiento en el centro del sensor. Esta función no asegura el centrado ni el alineamiento correcto de la óptica en todo el sensor.
A nivel profesional existen sistemas de compensación de aberraciones a gran escala pero muy complejos, debido al tamaño de los instrumentos en los cuales se deben aplicar.
Tal es el caso de los telescopios de “Magellan” (6 m de diámetro) , en los cuales existe un sistema de posicionamiento para posicionar el espejo secundario del telescopio compuesto de cuatro puntos de soporte, que requiere del uso de ocho actuadores, que implica un diseño mecánico complejo, no deseable de extrapolar al diseño de telescopios más pequeños (de por ejemplo 50 cma1mde diámetro) .
La mayoría de los telescopios de gran tamaño corrigen aberraciones ópticas de alineamiento mediante lo que se conoce como “wafefront sensing”, o sensado de frente de onda, mediante la utilización, en general, de un sensor “Shack Hartmann”. Esto permite corregir muchos modos ópticos donde la corrección se hace por actuadores debajo del espejo, pero obliga a tener un sistema de alto costo que no tiene interés implementar en telescopios pequeños debido a la pérdida de energía luminosa que supone un sensor adicional en un telescopio de diámetro pequeño.
A continuación se citan diferentes documentos de patente que describen propuestas de compensación de aberraciones ópticas en telescopios, de mayor o menor complejidad.
La solicitud EP0252034A2 describe un método para corregir, mediante medios electrónicos, los defectos de curvatura en las imágenes captadas, el cual es aplicable a telescopios de espejos de gran diámetro. El método se basa en ajustar la curvatura del espejo primario, el cual es parcialmente elástico, mediante la regulación de la presión de un gas en contacto con una de sus caras, bajo el control de un sistema electrónico en colaboración con dispositivos detectores de temperatura, presión y, opcionalmente con sistemas láser de monitorización de la curvatura del espejo primario.
La patente EP1208402B1 propone un sistema semi activo de compensación térmica y de enfoque de un telescopio reflector anastigmático de tres espejos oscurecido centralmente, donde el espejo secundario se encuentra montado sobre una estructura formada por unos puntales de soporte deformables térmicamente. El sistema comprende una serie de sensores de temperatura dispuestos en diferentes puntos o elementos del telescopio, y unos elementos calefactores dispuestos en los puntales de soporte, y opcionalmente en el espejo secundario, y está previsto para, en función de las temperaturas detectadas, controlar a los elementos calefactores para calentar selectivamente a los puntales para controlar la posición del espejo secundario en relación al espejo primario y, opcionalmente, para controlar también al espejo secundario para modificar su curvatura. De esta manera se mantienen sustancialmente constantes las curvaturas relativas entre el espejo secundario y el primario, así como la separación entre los mismos, con el fin de mantener al telescopio correctamente enfocado.
En EP1208402B1 no se indica la posibilidad de controlar la posición de otro elemento óptico que no sea el referido espejo secundario, ni de corregir otra clase de aberraciones más que las relativas al desenfoque.
Los siguientes dos antecedentes contemplan la posibilidad de analizar las imágenes adquiridas por un dispositivo de adquisición de imágenes para detectar aberraciones ópticas y actuar sobre un elemento óptico móvil del telescopio, con el fin de corregir dichas aberraciones ópticas.
En la solicitud internacional WO2006127986 se describe un aparato y unos métodos para el enfoque y colimación de telescopios, mediante una electrónica de control que, en función de información referente a los elementos ópticos,
Según un ejemplo de realización de WO2006127986, la información sobre la cual basar el referido control es la incluida en una imagen captada por una cámara, y ésta es procesada para determinar si el telescopio está bien enfocado
No se indica ni se sugiere en WO2006127986 actuar sobre otros elementos del telescopio que no sean la lente o el referido espejo secundario, ni corregir otra clase de aberraciones más que las relativas al desenfoque y colimado.
La patente US7130127B2 propone un telescopio terrestre con cámara digital que incluye un grupo de lentes de enfoque móviles según un eje óptico y un dispositivo de adquisición de imágenes dispuesto para recibir la luz que atraviesa a dichas lentes y a un elemento de reflexión/transmisión de luz dispuesto entre ambos.
Para un ejemplo de realización de US7130127B2 se propone procesar las imágenes adquiridas por el dispositivo de adquisición de imágenes con diversos fines, entre los que se incluye el de corregir el enfoque generando y aplicando las correspondientes señales de control sobre el grupo de lentes móviles para desplazarlas a lo largo del referido eje óptico.
Tampoco se indica en US7130127B2 la posibilidad de controlar la posición de otro elemento óptico que no sea el referido grupo de lentes ni de corregir otra clase de aberraciones más que las relativas al desenfoque.
Aparece necesario ofrecer una alternativa al estado de la técnica que cubra las lagunas halladas en el mismo, en particular las referidas a la ausencia de propuestas relativas a la compensación de aberraciones ópticas mediante el desplazamiento de un dispositivo de adquisición de imágenes de un telescopio, utilizable también para detectar dichas aberraciones ópticas.
Explicación de la invención La presente invención constituye tal alternativa al estado de la técnica, para lo cual concierne, en un primer aspecto, a un método para compensar aberraciones ópticas en un telescopio, que comprende realizar las siguientes etapas de manera automática:
a) detectar unas aberraciones ópticas que afectan al foco primario de un telescopio, mediante el análisis de una o más imágenes adquiridas por un dispositivo de adquisición de imágenes, tal como una cámara;
b)...
Reivindicaciones:
1. Método para compensar aberraciones ópticas en un telescopio, del tipo que comprende realizar las siguientes etapas de manera automática:
a) detectar unas aberraciones ópticas que afectan al foco primario de un telescopio, mediante el análisis de al menos una imagen adquirida por un dispositivo de adquisición de imágenes (3) ;
b) calcular, a partir de dichas aberraciones ópticas detectadas en a) , con el fin de compensarlas, unos primeros valores de corrección posicionales, y
c) mover, de manera controlada, al menos un elemento receptor de un haz primario, tras ser reflejado por un espejo primario o refractado por una lente objetivo de dicho telescopio, mediante la aplicación de unas señales de control adecuadas generadas a partir de dichos primeros valores de corrección posicionales,
estando el método caracterizado porque está aplicado a un telescopio donde dicho elemento receptor de un haz primario a mover en c) es dicho dispositivo de adquisición de imágenes (3) , y porque comprende utilizar un algoritmo sin sensor de procesamiento de imágenes para llevar a cabo dicha etapa a) , mediante dicho análisis de al menos una imagen adquirida por dicho dispositivo de adquisición de imágenes (3) , y para llevar a cabo dicha etapa b) , mediante el procesamiento de los valores de las aberraciones ópticas detectadas y la generación de dichos primeros valores de corrección posicionales como resultado de dicho procesamiento.
2. Método según la reivindicación 1, caracterizado porque dicho algoritmo sin sensor es un algoritmo de óptica adaptativa sin sensor.
3. Método según la reivindicación1ó2, caracterizado porque comprende realizar un proceso de calibración consistente en realizar una pluralidad de etapas a) para una correspondiente pluralidad de posiciones de dicho telescopio, correlacionar los datos de las aberraciones ópticas detectadas con los de las posiciones del telescopio para las que han sido detectadas, y registrar dichas correlaciones en un registro de corrección de aberraciones.
4. Método según la reivindicación 3, caracterizado porque dicho proceso de calibración comprende también realizar una pluralidad de dichas etapas b) para dicha pluralidad de posiciones del telescopio, y correlacionar los datos de primeros valores de corrección posicionales calculados con los datos relativos a las aberraciones ópticas detectadas y con los de las posiciones del telescopio correspondientes, e incluir dichos datos de primeros valores de corrección posicionales en dicho registro de corrección de aberraciones.
5. Método según la reivindicación 3, caracterizado porque comprende orientar el telescopio hacia unas coordenadas determinadas, consultar dicho registro de corrección de aberraciones para buscar en él los datos de la posición del telescopio una vez así orientado y los datos correlacionados de las aberraciones ópticas detectadas, y mover, en la etapa c) , el dispositivo de adquisición de imágenes (3) en función de los datos de aberraciones ópticas obtenidos como resultado de dicha consulta de dicho registro de corrección de aberraciones.
6. Método según la reivindicación 4, caracterizado porque comprende orientar el telescopio hacia unas coordenadas determinadas, consultar dicho registro de corrección de aberraciones para buscar en él los datos de la posición del telescopio una vez así orientado y los datos correlacionados de primeros valores de corrección posicionales, y mover, en la etapa c) , el dispositivo de adquisición de imágenes (3) de acuerdo con los datos de los primeros valores de corrección posicionales extraídos de dicho registro de corrección de aberraciones.
7. Método según la reivindicación5ó6, caracterizado porque comprende, con el fin de precisar dicha orientación del telescopio hacia dichas coordenadas determinadas, corregir errores de posicionamiento en relación a su sistema de montaje detectando al menos los valores de dichos errores de posicionamiento, directa y/o indirectamente, y utilizando un algoritmo de apuntado para procesar dichos valores y suministrar, como resultado de dicho procesamiento, unos segundos valores de corrección posicionales.
8. Método según la reivindicación 7, caracterizado porque comprende realizar dicha corrección de errores de posicionamiento, detectando también unos valores de uno o más parámetros no posicionales que tienen influencia en la generación de dichos errores de posicionamiento, y utilizar dicho algoritmo de apuntado para procesar también dichos valores de dichos parámetros no posicionales.
9. Método según la reivindicación 8, caracterizado porque comprende realizar un proceso de entrenamiento consistente en detectar valores de dichos errores de posicionamiento para una pluralidad de posiciones del telescopio, en relación a su sistema de montaje, en detectar y/o calcular valores de dichos parámetros no posicionales para al menos cada una de dicha pluralidad de posiciones del telescopio y/o para distintas temperaturas de trabajo a las que es sometido el telescopio, y en utilizar dicho algoritmo de apuntado para procesar todos dichos valores, suministrar y correlacionar los correspondientes segundos valores de corrección posicionales con los valores de errores de posicionamiento y de parámetros no posicionales, y registrar dichas correlaciones en un registro de apuntado.
10. Método según la reivindicación 8 ó 9, caracterizado porque de entre dicho o dichos parámetros no posicionales que tienen influencia en la generación de dichos errores de posicionamiento, el método comprende suministrar los valores del o los parámetros no posicionales que influyen también en el sistema óptico del telescopio, a dicho algoritmo sin sensor, y procesarlos mediante éste, junto con los valores de las aberraciones ópticas detectadas, para calcular, en la etapa b) , dichos primeros valores de corrección posicionales.
11. Método según la reivindicación 10, caracterizado porque dicho proceso de calibración comprende también al menos detectar y/o calcular valores de dichos parámetros no posicionales para al menos cada una de dicha pluralidad de posiciones del telescopio y/o para distintas temperaturas de trabajo a las que es sometido el telescopio, e incluir dichos valores detectados en dicho registro de corrección de aberraciones, así como utilizarlos para el cálculo, en dicha pluralidad de etapas b) , de dichos datos de primeros valores de corrección posicionales e incluirlos en dicho registro de corrección de aberraciones correlacionados también con los valores detectados y/o calculados de dichos parámetros no posicionales.
12. Método según la reivindicación 11, caracterizado porque comprende orientar el telescopio hacia unas coordenadas determinadas, consultar dicho registro de corrección de aberraciones para buscar en él los datos de la posición del telescopio una vez así orientado, los valores de dichos parámetros no posicionales detectados y/o calculados, y los datos correlacionados de primeros valores de corrección posicionales y mover, en la etapa c) , el dispositivo de adquisición de imágenes (3) de acuerdo con los datos de los primeros valores de corrección posicionales consultados en dicho registro de corrección de aberraciones.
13. Método según la reivindicación 12 cuando depende de la 9, caracterizado porque comprende, con el fin de obtener, respecto a una región del espacio situada en unas coordenadas determinadas, imágenes que estén sustancialmente libres de la influencia de aberraciones ópticas y de errores de posicionamiento, realizar las siguientes acciones:
-detectar, para la posición del telescopio, respecto a su sistema de montaje, correspondiente a dichas coordenadas, los valores de errores de posicionamiento y la temperatura de trabajo y detectar y/o calcular los valores de dichos parámetros no posicionales correspondientes a dicha posición y temperatura de trabajo;
-consultar los valores detectados de errores de posicionamiento y los detectados y/o calculados de parámetros no posicionales en dicho registro de apuntado, obtener los segundos valores de corrección posicionales correlacionados y utilizarlos para orientar el telescopio hacia dichas coordenadas de manera precisa;
-consultar dicho registro de corrección de aberraciones para buscar en él los primeros valores de corrección posicionales correlacionados con los datos de la posición del telescopio correspondientes a dichas coordenadas y con los valores de dichos parámetros no posicionales detectados y/o calculados, y
-mover, en la etapa c) , el dispositivo de adquisición de imágenes (3) de acuerdo con los datos de los primeros valores de corrección posicionales obtenidos en dicha consulta del registro de corrección de aberraciones.
14. Método según una cualquiera de las reivindicaciones anteriores, caracterizado porque dicha etapa b) comprende calcular también, a partir de al menos dichas aberraciones ópticas detectadas en a) , con el fin de compensarlas, unos terceros valores de corrección posicionales para un elemento receptor de un haz reflejado por un espejo secundario del telescopio, y porque dicha etapa c) comprende también mover a dicho elemento receptor de dicho haz reflejado por dicho espejo secundario, mediante la aplicación de unas señales adecuadas generadas a partir de dichos terceros valores de corrección posicionales.
15. Método según una cualquiera de las reivindicaciones anteriores, caracterizado porque comprende utilizar dicho algoritmo sin sensor ajustando la anchura del espectro frecuencial a analizar y procesar para limitar los efectos relativos a las sombras debidas a las obstrucciones que aparecen en la imagen o imágenes, provocadas por la interposición de dicho dispositivo de adquisición de imágenes (3) , y/o de otro elemento, entre la luz incidente y el espejo primario.
16. Método según la reivindicación 15, caracterizado porque dicho espectro frecuencial a analizar y procesar por parte del algoritmo sin sensor está entre un 0, 5 y un 20% del espectro frecuencial total de las imágenes adquiridas.
17. Método según una cualquiera de las reivindicaciones anteriores, caracterizado porque dichas aberraciones a compensar son al menos una del grupo que incluye las siguientes aberraciones ópticas de bajo orden: desenfoque, alabeo, inclinación, coma, o una combinación de las mismas.
18. Método según una cualquiera de las reivindicaciones8a13, caracterizado porque:
-dichos parámetros no posicionales son uno o más parámetros del grupo que incluye los siguientes parámetros no posicionales: coeficientes de dilatación por temperatura, flexión del soporte de un espejo, flexión de un soporte del dispositivo de captación de imágenes, flexión del tubo del telescopio, flexión del sistema de montaje o montura del telescopio, o una combinación de los mismos,
-y porque dichos errores de posicionamiento hacen referencia a al menos uno de los siguientes parámetros posicionales relativos al sistema de montaje del telescopio: parámetro de desplazamiento delta y parámetro de desplazamiento alfa de la referencia de cada eje, parámetro de no perpendicularidad delta y parámetro de no perpendicularidad alfa de los ejes, parámetro de error de alineamiento horizontal y parámetro de error de alineamiento vertical al polo, para un sistema de montaje o montura ecuatorial, o al punto cenital, para un sistema de montaje o montura alt-Azimutal, o una combinación de los mismos.
19. Método según una cualquiera de las reivindicaciones anteriores, caracterizado porque comprende mover dicho dispositivo de adquisición de imágenes (3) moviendo un soporte (4) del mismo según diferentes grados de libertad.
20. Sistema para compensar aberraciones ópticas en un telescopio, donde dicho telescopio comprende al menos un elemento receptor de un haz primario, tras ser reflejado por un espejo primario o refractado por una lente objetivo de dicho telescopio, siendo el sistema del tipo que comprende:
-unos primeros medios de detección que comprenden al menos un dispositivo de adquisición de imágenes (3) , y que están previstos para detectar unas aberraciones ópticas que afectan al foco primario de dicho telescopio mediante el análisis de al menos una imagen adquirida por dicho dispositivo de adquisición de imágenes (3) ; y
-un sistema electrónico en conexión o integrando al menos parte de dichos primeros medios de detección y en conexión con al menos dicho elemento receptor de un haz primario, estando dicho sistema electrónico previsto para calcular, a partir de las aberraciones ópticas detectadas, con el fin de compensarlas, unos primeros valores de corrección posicionales, para generar, a partir de éstos, unas señales de control, y para aplicarlas sobre al menos un mecanismo de accionamiento de dicho elemento receptor de un haz primario, o de un soporte móvil (4) del mismo, con el fin de moverlo de manera controlada;
estando el sistema caracterizado porque está aplicado a un telescopio donde dicho elemento receptor de un haz primario a mover de manera controlada es dicho dispositivo de adquisición de imágenes (3) , porque dichos primeros medios de detección se encuentran integrados en parte en dicho sistema electrónico, y porque dicho sistema electrónico implementa un algoritmo sin sensor de procesamiento de imágenes para llevar a cabo dicha detección de aberraciones mediante dicho análisis de al menos una imagen adquirida por dicho dispositivo de adquisición de imágenes (3) , para procesar los valores de las aberraciones ópticas detectadas y para generar dichos primeros valores de corrección posicionales y dichas señales de control.
21. Sistema según la reivindicación 20, caracterizado porque dicho algoritmo sin sensor implementado en dicho sistema electrónico es un algoritmo de óptica adaptativa sin sensor.
22. Sistema según la reivindicación 20, caracterizado porque dicho soporte móvil (4) del dispositivo de adquisición de imágenes (3) está montado en una estructura de sustentación y posicionamiento dispuesta sobre el telescopio y prevista para desplazar al soporte móvil (4) , y con él al dispositivo de adquisición de imágenes (3) , según al menos los siguientes movimientos:
-movimiento lineal en alejamiento/acercamiento a lo largo de la dirección del eje longitudinal del tubo del telescopio, para compensar aberraciones de desenfoque;
-movimiento de rotación con respecto a dos ejes, perpendiculares entre sí y respecto a dicho eje longitudinal del tubo del telescopio, para compensar aberraciones de alabeo e inclinación; y
-movimiento lateral a lo largo de un plano perpendicular al eje longitudinal del telescopio, para compensar aberraciones de coma.
23. Sistema según la reivindicación 22, caracterizado porque dicha estructura de sustentación y posicionamiento comprende al menos tres mecanismos de accionamiento (S1, S2, S3) montados en tres respectivos puntos a lo largo del contorno del tubo (5) del telescopio, sobresaliendo hacia fuera del tubo (5) , y cada uno de ellos conectado también a un respectivo punto del soporte móvil (4) a través de un respectivo elemento de unión (6, 7, 8) , estando el sistema electrónico previsto para controlar a dichos mecanismos de accionamiento (S1, S2, S3) , que son al menos tres, mediante la generación y aplicación de dichas señales de control, para provocar un accionamiento combinado que mueva al soporte móvil (4) para compensar las aberraciones ópticas detectadas.
24. Sistema según la reivindicación 23, caracterizado porque dichos tres puntos se encuentran separados entre sí una distancia angular de sustancialmente 120º.
25. Sistema según la reivindicación 23 ó 24, caracterizado porque cada uno de dichos mecanismos de accionamiento (S1, S2, S3) , que son al menos tres, está previsto para mover a su respectivo elemento de unión (6, 7, 8) , y por tanto al soporte móvil (4) , por un respectivo plano que contiene, o es paralelo a un plano que contiene, al eje longitudinal del tubo (5) del telescopio.
26. Sistema según la reivindicación 25, caracterizado porque cada uno de dichos mecanismos de accionamiento (S1, S2, S3) , que son al menos tres, comprende:
-al menos un primer brazo (9) unido por una zona intermedia a dicho elemento de unión (6, 7, 8) y un segundo brazo (10) unido, por un primer extremo (10a) o por una zona próxima a dicho primer extremo (10a) , mediante una primera articulación (A1) , a dicho punto del contorno del tubo (5) del telescopio, y también unido, por dicho primer extremo (10a, ) a un primer extremo (9a) de dicho primer brazo (9) mediante una segunda articulación (A2) , y
-al menos dos motores (M1-M2) , cada uno de ellos conectado cinemáticamente a uno de dichos primer (9) y segundo (10) brazos para desplazarlos, respectivamente, según un movimiento giratorio alrededor de dichas primera (A1) y segunda (A2) articulaciones.
27. Sistema según una cualquiera de las reivindicaciones 23 a 26, caracterizado porque dichos elementos de unión (6, 7, 8) son unas respectivas láminas metálicas dispuestas ocupando unos respectivos planos que contienen,
o son paralelos a unos planos que contienen, al eje longitudinal del tubo del telescopio, con el fin de minimizar la interferencia de las mismas en el camino del haz que se dirige al espejo primario.
28. Sistema según una cualquiera de las reivindicaciones 23 a 27, caracterizado porque dichos elementos de unión (6, 7, 8) se encuentran dispuestos bajo tensión, y porque el sistema electrónico está previsto para controlar a los mecanismos de accionamiento (S1, S2, S3) , que son al menos tres, mediante la aplicación de dichas señales de control en incrementos sucesivos, en cada uno de los mecanismos de accionamiento (S1, S2, S3) , para desplazar al soporte móvil (4) desde un punto de compensación hasta un punto vecino sin que se destensen los elementos de unión (6, 7, 8) .
29. Sistema según una cualquiera de las reivindicaciones 20 a 28, caracterizado porque está previsto para implementar el método según una cualquiera de las reivindicaciones 1 a 19, llevándose a cabo dichas etapas a) y b) mediante el sistema electrónico y el dispositivo de adquisición de imágenes, y dicha etapa c) mediante el sistema electrónico en colaboración con dicho o dichos medios de accionamiento.
Patentes similares o relacionadas:
SISTEMA DE AUTO COLIMACIÓN PARA UN TELESCOPIO; TELESCOPIO REFLECTOR NEWTONIANO; Y MÉTODO PARA COLIMAR UN TELESCOPIO, del 22 de Mayo de 2020, de PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE: Sistema y método de auto colimación para un telescopio, el cual permite mantener el telescopio colimado ante deformaciones que pueda sufrir su estructura en cualquier instante […]
Telescopio anastigmático bifocal con cinco espejos, del 30 de Octubre de 2019, de THALES: Telescopio anastigmático bifocal con cinco espejos asféricos que comprende: - un primer espejo (M1) cóncavo, un segundo espejo (M2) convexo, un tercer espejo (M3) cóncavo […]
Sistema de vigilancia espacial para la vigilancia del espacio próximo, del 20 de Febrero de 2019, de ArianeGroup SAS: Sistema de vigilancia espacial que comprende sistemas ópticos de vigilancia en red, adaptados para escrutar zonas de la órbita terrestre especialmente la capa […]
Procedimiento de realización de un sistema de vigilancia espacial para la vigilancia del espacio próximo, del 4 de Diciembre de 2018, de ArianeGroup SAS: Procedimiento de realización de un sistema de vigilancia espacial en zonas LEO de la órbita terrestre que comprende una etapa de disposición […]
Telescopio de imagenología estereoscópico compacto, del 21 de Junio de 2017, de THALES: Dispositivo de imagenología estereoscópico compacto que consta de un dispositivo óptico de formación de imagen y un dispositivo de detección optoelectrónico que tiene dos […]
Telescopio que comprende un espejo activo y medios de supervisión interna de dicho espejo activo, del 19 de Abril de 2017, de THALES: Telescopio que comprende al menos un sistema óptico y medios (D) de análisis de la superficie de onda dispuestos en el plano de focalización de dicho sistema […]
 Instrumento de adquisición espacial con reflector(es) desplegable(s) y alta compacidad, del 16 de Julio de 2014, de THALES: Instrumento de adquisición espacial (IO), que comprende un reflector primario desplegable, un reflector secundario (RS) y unos medios de adquisición (MA) adecuados […]
Instrumento de adquisición espacial con reflector(es) desplegable(s) y alta compacidad, del 16 de Julio de 2014, de THALES: Instrumento de adquisición espacial (IO), que comprende un reflector primario desplegable, un reflector secundario (RS) y unos medios de adquisición (MA) adecuados […]
SISTEMA CATÓPTRICO GRAN ANGULAR, del 7 de Julio de 2011, de THALES: Sistema catóptrico gran angular de campo rectangular para la astronomía o la observación de la Tierra, que comprende un primer espejo M1, […]