DISPOSITIVO DE EMPUÑADURA PARA EL MANDO DE LOS MOVIMIENTOS DE APERTURA O DE CIERRE DE UNA PIEZA DE TELEMANIPULADOR.
Dispositivo de empuñadura, para el mando de los movimientos de apertura o de,
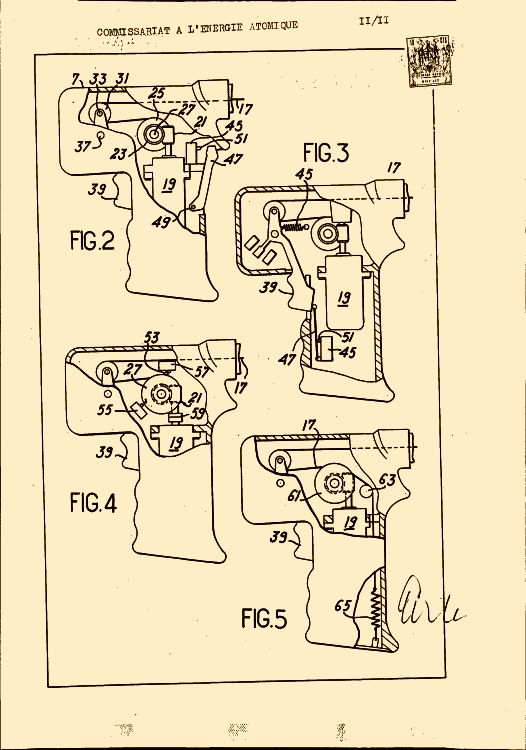
cierre de una pinza de telemanipulador que incluye una culata hueca; apropiada para ser tenida en la mano de un operador y, dispuestos en el interior de dicha culata, un torno sobre el cual se enrolla un cable de transmisión del movimiento, un motor de arrastre de dicho torno, con limitador de par, un disparador de mando de dicho motor, estando constituido dicho disparador accionable por el operador por uno de los extremos de una palanca que pivota alrededor de un eje fijo con relación a dicha culata, llevando el otro extremo de dicha palanca, asociado a un resorte antagonista, una polea de inversión sobre la cual pasa dicho cable de transmisión, y dos órganos de finales de carrera asociados, a dicha palanca y que mandan la marcha del motor en el sentido conveniente.
Tipo: Resumen de patente/invención.
Solicitante: COMMISSARIAT A PENERGIE ATOMIQUE.
Fecha de Publicación: .
Clasificación PCT:
- B25J13/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 13/00 Controles para manipuladores (controles por programa B25J 9/16). › Medios de control por aprehensión manual.
Clasificación antigua:
- B25J B25 […] › MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
Patentes similares o relacionadas:
Guante de exoesqueleto, del 15 de Abril de 2020, de ADJUVO MOTION B.V: Guante de exoesqueleto provisto al menos de un mecanismo de vinculación individual para cada dedo, en el que el mecanismo […]
MÉTODO DE MANEJO DE UN SISTEMA ROBÓTICO PARA CIRUGÍA MÍNIMAMENTE INVASIVA, del 28 de Diciembre de 2017, de UNIVERSIDAD DE MALAGA: Método de manejo de un sistema robótico para cirugía mínimamente invasiva que comprende: planificar una posición y orientación de un efector a partir del desplazamiento […]
SISTEMA ROBÓTICO QUIRÚRGICO Y MÉTODO PARA MANEJAR UN SISTEMA ROBÓTICO QUIRÚRGICO, del 28 de Diciembre de 2017, de FUNDACION TECNALIA RESEARCH & INNOVATION: Un sistema robótico quirúrgico que comprende: unidades robóticas, cada una de las cuales es independiente de las demás y comprende un soporte […]
Método de control para un dispositivo de elevación de equilibrio y un dispositivo de equilibrado de elevación, del 19 de Julio de 2017, de Terex MHPS GmbH: Procedimiento de control para un polipasto de equilibrado que comprende un motor de elevación que puede accionarse por medio de un sistema de control […]
DISPOSITIVO DE REALIDAD AUMENTADA HAPTICO PARA FACILITAR LAS ACCIONES SOBRE UNA PÉRTIGA DE REPOSTAJE EN VUELO, del 30 de Marzo de 2017, de DEFENSYA INGENIERÍA INTERNACIONAL, S.L: Dispositivo de realidad aumentada háptico para facilitar las acciones de control de la pértiga en pleno vuelo, permitiendo el control sobre el boom […]
MÉTODO DE MANEJO DE UN SISTEMA ROBÓTICO PARA CIRUGÍA MÍNIMAMENTE INVASIVA, del 29 de Marzo de 2017, de UNIVERSIDAD DE MALAGA: Método de manejo de un sistema robótico para cirugía mínimamente invasiva que comprende: planificar una posición y orientación de un efector a partir del desplazamiento […]
DISPOSITIVO DE REALIDAD AUMENTADA HAPTICO PARA FACILITAR LAS ACCIONES SOBRE UNA PÉRTIGA DE REPOSTAJE EN VUELO, del 22 de Agosto de 2016, de DEFENSYA INGENIERÍA INTERNACIONAL, S.L: Dispositivo de realidad aumentada háptico para facilitar las acciones sobre una pértiga de repostaje en vuelo. Dispositivo de realidad aumentada háptico para facilitar […]
 Aplicador médico servoasistido, del 6 de Abril de 2016, de WAVELIGHT GMBH: Procedimiento para el posicionamiento de un dispositivo médico con los pasos:
detección de una fuerza que actúa sobre un dispositivo de guía […]
Aplicador médico servoasistido, del 6 de Abril de 2016, de WAVELIGHT GMBH: Procedimiento para el posicionamiento de un dispositivo médico con los pasos:
detección de una fuerza que actúa sobre un dispositivo de guía […]