Procedimiento de determinación de una distancia de visibilidad para un conductor de vehículo.
Procedimiento de determinación de una distancia de visibilidad (D) para un conductor de un vehículo en presencia de un elemento (BR) que perturba la visibilidad del conductor,
que comprende las siguientes etapas:
- registro de al menos una imagen (I1, I2) de un campo del espacio (4) situado delante del vehículo, definiéndose dicha imagen mediante un conjunto de píxeles (PIX) y de líneas de exploración (BL),
- separación de dicha imagen (I1, I2) en dos partes por una primera línea (7) que pasa por un punto predeterminado (PD),
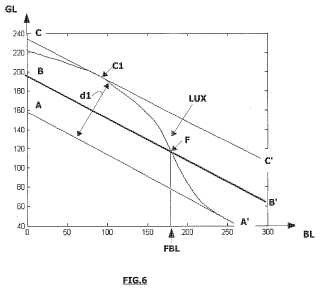
- determinación de la luminosidad de los píxeles (PIX) de dicha primera línea (7), dando como resultado una curva de luminosidad (LUX),
caracterizado porque comprende además las siguientes etapas:
- determinación de una primera tangente (AA') a la curva de luminosidad (LUX) tangente a un lugar de dicha curva representativo de una región de luminosidad sensiblemente independiente del elemento perturbador (BR),
- determinación de una segunda tangente (CC') a la curva de luminosidad (LUX) tangente a un lugar de dicha curva representativo de una estabilización de la luminosidad,
- determinación de una línea de exploración (FBL) en función de la primera tangente (AA') y segunda tangente (CC'), siendo dicha línea de exploración (FBL) representativa de la distancia de visibilidad (D).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07290693.
Solicitante: VALEO VISION.
Nacionalidad solicitante: Francia.
Dirección: 34, RUE SAINT-ANDRÉ 93012 BOBIGNY CEDEX FRANCIA.
Inventor/es: LELEVE, JOEL, Rebut,Julien.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60R16/023 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60R VEHICULOS, EQUIPOS O PARTES DE VEHICULOS, NO PREVISTOS EN OTRO LUGAR (prevención, limitación o extinción de incendios especialmente adaptadas a los vehículos A62C 3/07). › B60R 16/00 Circuitos eléctricos o circuitos de fluidos especialmente adaptados a vehículos y no previstos en otro lugar; Disposiciones de elementos de circuitos eléctricos o circuitos de fluido especialmente adaptados a vehículos y no previstos en otro lugar. › para la transmisión de señales entre partes o subsistemas del vehículo.
- G01N21/53 FISICA. › G01 METROLOGIA; ENSAYOS. › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › G01N 21/00 Investigación o análisis de los materiales por la utilización de medios ópticos, es decir, utilizando rayos infrarrojos, visibles o ultravioletas (G01N 3/00 - G01N 19/00 tienen prioridad). › en una corriente de fluido, p. ej. en el humo.
- G01S11/12 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 11/00 Sistemas para determinar la distancia o la velocidad que no utilizan la reflexión o la rerradiación (establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia G01S 5/00). › que utilizan ondas electromagnéticas que no sean ondas de radio.
- G06T7/00 G […] › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Análisis de imagen.
- G06T7/60 G06T […] › G06T 7/00 Análisis de imagen. › Análisis de los atributos geométricos.
PDF original: ES-2380819_T3.pdf
Fragmento de la descripción:
Procedimiento de determinación de una distancia de visibilidad para un conductor de vehículo
5 Campo de la invención
La presente invención se refiere a un procedimiento de determinación de una distancia de visibilidad para un conductor de un vehículo en presencia de un elemento que perturba la visibilidad del conductor. El elemento perturbador es, por ejemplo, la niebla, y el vehículo, por ejemplo, un vehículo automóvil.
Estado de la técnica
De acuerdo con un estado de la técnica conocido, documento EP 1422663 A1, un procedimiento de determinación de este tipo comprende las siguientes etapas:
- registro de al menos una imagen de un campo del espacio situado delante del vehículo, definiéndose dicha imagen mediante un conjunto de píxeles,
- separación de dicha imagen en dos partes por una línea que pasa por un punto predeterminado,
- determinación de la luminosidad de los píxeles de dicha línea, dando como resultado una curva de luminosidad,
- determinación de un punto de inflexión de la curva de luminosidad mediante cálculo de la derivada de dicha curva,
- determinación de la distancia de visibilidad del conductor de dicho vehículo en función de la posición del punto de inflexión sobre dicha imagen.
Tal solución presenta los siguientes inconvenientes.
En primer lugar, el cálculo de la derivada conduce a dificultades de interpretación, imprecisiones y serios errores, en particular si existe un obstáculo en la carretera por la que se desplaza un vehículo, por ejemplo otro vehículo, un puente... En efecto, tal obstáculo originará, desde el mismo cálculo de la derivada, una pluralidad de puntos de inflexión, de ahí la dificultad de discriminar los diferentes puntos de inflexión si están cercanos entre sí y de elegir el correcto punto de inflexión correspondiente a la distancia de visibilidad buscada.
En segundo lugar, el cálculo de la derivada amplifica el ruido generado en la curva de luminosidad, originando incertidumbres sobre la propia curva.
Finalmente, el cálculo de la derivada representa una elevada carga de cálculo.
Objeto de la invención
La presente invención pone remedio a estos inconvenientes del estado de la técnica.
45 En efecto, se refiere ésta, de acuerdo con un primer objeto, a un procedimiento de determinación de una distancia de visibilidad para un conductor de un vehículo en presencia de un elemento que perturba la visibilidad del conductor, que comprende las siguientes etapas:
- registro de al menos una imagen de un campo del espacio situado delante del vehículo, definiéndose dicha imagen mediante un conjunto de píxeles y de líneas de exploración,
- separación de dicha imagen en dos partes por una primera línea que pasa por un punto predeterminado,
- determinación de la luminosidad de los píxeles de dicha primera vertical, dando como resultado una curva de 55 luminosidad,
caracterizado porque comprende además las siguientes etapas:
- determinación de una primera tangente a la curva de luminosidad tangente a un lugar de dicha curva representativo de una región de luminosidad sensiblemente independiente del elemento perturbador,
- determinación de una segunda tangente a la curva de luminosidad tangente a un lugar de dicha curva representativo de una estabilización de la luminosidad,
65. determinación de una línea de exploración en función de la primera tangente y de la segunda tangente, siendo dicha línea de exploración representativa de la distancia de visibilidad.
Como se verá más adelante con detalle, la determinación de la distancia de visibilidad tan sólo hace intervenir combinaciones lineales simples, por lo que esta determinación es más rápida que aquella de la técnica anterior. Además, elimina las incertidumbres relacionadas con el ruido generado por el cálculo de la derivada del estado de la técnica, puesto que ya no hay cálculo de derivada. Finalmente, este procedimiento puede ser utilizado con la presencia de obstáculos en la carretera, sin que la determinación de la distancia se vea por ello perturbada.
De acuerdo con formas de realización no limitativas, el procedimiento de determinación de la distancia de visibilidad presenta las siguientes características suplementarias:
- La primera línea es una línea recta vertical. Así, la determinación de tal línea recta vertical es rápida.
- Dicho elemento de perturbación es la niebla. Así, el procedimiento es útil en condiciones de niebla. 15 - El procedimiento comprende además:
• una etapa de búsqueda de las zonas de dicha imagen que responden cada una de ellas a un predicado de homogeneidad,
• una determinación del centro de gravedad de cada una de dichas zonas,
• una determinación del centro de gravedad global de cada uno de dichos centros de gravedad de dichas zonas, siendo dicho centro de gravedad global dicho punto predeterminado.
Así, el centro de gravedad global G es la resultante de centros de gravedad de dos zonas homogéneas en la carretera y en el cielo. Al buscar estas zonas, se limita el riesgo de medidas perturbadas por obstáculos (márgenes de carretera, mediana, árboles, etc.) . Esto es útil en las curvas.
- La segunda tangente es paralela a la primera tangente. Esto permite tener un cálculo simple y rápido.
- La línea de exploración es calculada en función de un punto de intersección entre la curva de luminosidad y una paralela a la primera tangente a una distancia determinada de la primera tangente y de la segunda tangente.
- La distancia determinada es la distancia entre la primera tangente y la segunda tangente dividida por dos. 35
- La distancia de visibilidad es determinada a partir de la línea de exploración encontrada y por medio de una tabla de consulta o por medio de un cálculo trigonométrico. La determinación de la distancia de visibilidad mediante lectura de una tabla de consulta es muy rápida.
- El cálculo trigonométrico es el siguiente: la distancia de visibilidad es igual a una altura respecto al suelo de un elemento que efectúa el registro de la imagen, dividida por la tangente de:
• el valor de un ángulo de visión de la línea de exploración más elevada, más 45 • un campo angular total dividido por el número de línea de exploración más elevada, todo ello multiplicado por • ese número de línea más elevada menos la línea de exploración correspondiente al punto de intersección calculado.
La invención se refiere, de acuerdo con un segundo objeto, a un dispositivo de determinación de una distancia de visibilidad para un conductor de un vehículo en presencia de un elemento que perturba la visibilidad del conductor, que incorpora:
- medios para recibir al menos una imagen registrada a partir de un campo del espacio situado delante del vehículo, 55 definiéndose dicha imagen mediante un conjunto de píxeles y de líneas de exploración,
- medios para separar dicha imagen en dos partes por una primera línea que pasa por un punto predeterminado,
- medios para determinar la luminosidad de los píxeles de dicha primera línea, dando como resultado una curva de luminosidad,
caracterizado porque incorpora además:
- medios para determinar una primera tangente a la curva de luminosidad tangente a un lugar de dicha curva 65 representativo de una región de luminosidad sensiblemente independiente del elemento perturbador,
- medios para determinar una segunda tangente a la curva de luminosidad tangente a un lugar de dicha curva representativo de una estabilización de la luminosidad, y
- medios para determinar una línea de exploración función de la primera tangente y de la segunda tangente, siendo dicha línea de exploración representativa de la distancia de visibilidad.
De acuerdo con formas de realización no limitativas, el dispositivo incorpora las siguientes características suplementarias:
- El dispositivo va integrado en una cámara a bordo del vehículo.
- La línea de exploración es calculada en función de un punto de intersección entre la curva de luminosidad y una
paralela a la primera tangente y a la segunda tangente a una distancia determinada de la primera tangente y de la 15 segunda tangente.
- La distancia determinada es la distancia entre la primera tangente y la segunda tangente dividida por dos.
- La distancia de visibilidad es determinada a partir de la línea de exploración encontrada y por medio de una tabla 20 de consulta o por medio de... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de determinación de una distancia de visibilidad (D) para un conductor de un vehículo en presencia de un elemento (BR) que perturba la visibilidad del conductor, que comprende las siguientes etapas: 5
- registro de al menos una imagen (I1, I2) de un campo del espacio (4) situado delante del vehículo, definiéndose dicha imagen mediante un conjunto de píxeles (PIX) y de líneas de exploración (BL) ,
- separación de dicha imagen (I1, I2) en dos partes por una primera línea (7) que pasa por un punto predeterminado (PD) ,
- determinación de la luminosidad de los píxeles (PIX) de dicha primera línea (7) , dando como resultado una curva de luminosidad (LUX) ,
caracterizado porque comprende además las siguientes etapas:
- determinación de una primera tangente (AA') a la curva de luminosidad (LUX) tangente a un lugar de dicha curva representativo de una región de luminosidad sensiblemente independiente del elemento perturbador (BR) ,
- determinación de una segunda tangente (CC') a la curva de luminosidad (LUX) tangente a un lugar de dicha curva representativo de una estabilización de la luminosidad,
- determinación de una línea de exploración (FBL) en función de la primera tangente (AA') y segunda tangente (CC') ,
siendo dicha línea de exploración (FBL) representativa de la distancia de visibilidad (D) . 25
2. Procedimiento según la reivindicación 1, caracterizado porque dicho elemento de perturbación es la niebla.
3. Procedimiento según una de las reivindicaciones 1 ó 2, caracterizado porque la primera línea (7) es una línea recta vertical.
4. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque comprende además:
- una etapa de búsqueda de las zonas de dicha imagen que responden cada una de ellas a un predicado de
homogeneidad, 35
- una determinación del centro de gravedad (G1, G2) de cada una de dichas zonas,
- una determinación del centro de gravedad global (G) de cada uno de dichos centros de gravedad (G1, G2) de dichas zonas, siendo dicho centro de gravedad global (G) dicho punto predeterminado (PD) .
5. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque la segunda tangente (CC') es paralela a la primera tangente (AA') .
6. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque la línea de exploración (FBL)
45 es calculada en función de un punto de intersección (F) entre la curva de luminosidad (LUX) y una paralela (BB') a la primera tangente (AA') a una distancia (d1/2) determinada de la primera tangente (AA') y de la segunda tangente (CC') .
7. Procedimiento según la reivindicación precedente, caracterizado porque la distancia determinada (d1/2) es la distancia entre la primera tangente (AA') y la segunda tangente (CC') dividida por dos.
8. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque la distancia de visibilidad (D) es determinada a partir de la línea de exploración (FBL) encontrada y por medio de una tabla de consulta (TAB) o por medio de un cálculo trigonométrico.
9. Procedimiento según la reivindicación precedente, caracterizado porque el cálculo trigonométrico es el siguiente: la distancia de visibilidad es igual a una altura (h) respecto al suelo (6) de un elemento (2) que efectúa el registro de la imagen, dividida por la tangente de:
- el valor de un ángulo de visión (α0) de la línea de exploración más elevada (BL256) , más
- un campo angular total (A) dividido por el número (256) de línea de exploración más elevada (BL256) , todo ello multiplicado por
65. ese número de línea más elevada (256) menos la línea de exploración (FBL) correspondiente al punto de intersección (F) calculado.
10. Dispositivo de determinación (PRO) de una distancia de visibilidad (D) para un conductor de un vehículo en presencia de un elemento (BR) que perturba la visibilidad del conductor, que incorpora:
- medios (S1) para recibir al menos una imagen (I1, I2) registrada a partir de un campo del espacio (4) situado delante del vehículo, definiéndose dicha imagen mediante un conjunto de píxeles (PIX) y de líneas de exploración (BL) ,
- medios (S2) para separar dicha imagen (I1, I2) en dos partes por una primera línea (7) que pasa por un punto 10 predeterminado (PD) ,
- medios (S3) para determinar la luminosidad de los píxeles de dicha primera línea (7) , dando como resultado una curva de luminosidad (LUX) ,
caracterizado porque incorpora además:
- medios (S4) para determinar una primera tangente (AA') a la curva de luminosidad (LUX) tangente a un lugar de dicha curva representativo de una región de luminosidad sensiblemente independiente del elemento perturbador (BR) ,
- medios (S5) para determinar una segunda tangente (CC') a la curva de luminosidad (LUX) tangente a un lugar de dicha curva representativo de una estabilización de la luminosidad, y
- medios (S6) para determinar una línea de exploración (FBL) función de la primera tangente (AA') y de la segunda 25 tangente (CC') , siendo dicha línea de exploración representativa de la distancia de visibilidad (D) .
11. Dispositivo (PRO) según la reivindicación precedente, caracterizado porque va integrado en una cámara (2) a bordo del vehículo (1) .
12. Dispositivo (PRO) según una de las precedentes reivindicaciones 10 u 11, caracterizado porque la línea de exploración (FBL) es calculada en función de un punto de intersección (F) entre la curva de luminosidad (LUX) y una paralela (BB') a la primera tangente (AA') a una distancia (d1) determinada de la primera tangente (AA') y de la segunda tangente (CC') .
13. Dispositivo (PRO) según la reivindicación precedente, caracterizado porque la distancia determinada (d1) es la distancia entre la primera tangente (AA') y la segunda tangente (CC') dividida por dos.
14. Dispositivo (PRO) según una de las precedentes reivindicaciones 10 a 13, caracterizado porque incorpora además medios (S7) para determinar la distancia de visibilidad (D) a partir de la línea de exploración encontrada 40 (FBL) y por medio de la tabla de consulta (TAB) o por medio de un cálculo trigonométrico.
15. Producto de programa de ordenador que comprende una o varias secuencias de instrucciones para poner en práctica, cuando dicho programa es ejecutado por un procesador, el procedimiento según una cualquiera de las precedentes reivindicaciones 1 a 9.
Patentes similares o relacionadas:
Método, sistema y producto del programa informático para determinar la presencia de microorganismos e identificar dichos microorganismos, del 29 de Julio de 2020, de BIOMERIEUX: Un método para determinar la presencia de al menos un microorganismo determinado en una placa de Petri que comprende una o más colonias de microorganismos y un medio de […]
Detección de daño de pantalla para dispositivos, del 8 de Julio de 2020, de Hyla, Inc: Un procedimiento para identificar una condición de una o más pantallas de un dispositivo electrónico, comprendiendo el procedimiento: recibir una solicitud […]
PROCEDIMIENTO DE IDENTIFICACIÓN DE IMÁGENES ÓSEAS, del 29 de Junio de 2020, de UNIVERSIDAD DE GRANADA: Procedimiento de identificación de imágenes óseas. La presente invención tiene por objeto un procedimiento para asistir en la toma de decisiones a un experto forense […]
Distribución controlada de muestras sobre sustratos, del 27 de Mayo de 2020, de Roche Diagnostics Hematology, Inc: Un procedimiento para distribuir una muestra de líquido sobre un sustrato , comprendiendo el procedimiento: obtener una […]
Procedimientos, sistemas y dispositivos para analizar datos de imágenes pulmonares, del 27 de Mayo de 2020, de Pulmonx Corporation: Procedimiento para analizar datos de tomografía computarizada de un pulmón, comprendiendo el procedimiento: recibir mediante un dispositivo […]
Sistema y procedimiento de control de calidad de platos preparados, del 14 de Mayo de 2020, de BEABLOO, S.L: Sistema y procedimiento de control de calidad de platos preparados. El sistema comprende medios de detección para detectar los ingredientes […]
Registro de imagen de catéter del seno coronario, del 13 de Mayo de 2020, de Biosense Webster (Israel), Ltd: Un aparato que comprende: un catéter cardíaco adaptado para su introducción en un seno coronario de un corazón de un sujeto vivo; una pantalla ; un dispositivo […]
Sistema y aplicación para visualizar la realidad exterior mientras se utilizan teléfonos y dispositivos móviles, del 11 de Mayo de 2020, de YAGÜE HERNANZ, Ricardo: 1. Sistema y aplicación para ver en los teléfonos y terminales móviles la realidad exterior a la vez que se usan y se visualizan sus […]