13 inventos, patentes y modelos de MUÑOZ MARTINEZ,VICTOR FERNANDO
SISTEMA ROBÓTICO QUIRÚRGICO Y MÉTODO PARA MANEJAR UN SISTEMA ROBÓTICO QUIRÚRGICO.
(28/12/2017) Un sistema robótico quirúrgico que comprende: unidades robóticas, cada una de las cuales es independiente de las demás y comprende un soporte y un conjunto de brazo robótico ; dicho soporte comprende medios de movimiento y está configurado para cambiar la posición y la orientación del soporte con respecto a la mesa ; dicho conjunto de brazo robótico comprende: un brazo robótico , una herramienta quirúrgica acoplada a este y un sensor de fuerza configurado para recibir la medición de las fuerzas y de los pares aplicados por la herramienta . El sistema comprende también una consola de control configurada para manejar a distancia dichas unidades robóticas, que comprende: un medio de computación ; dispositivos…
MÉTODO DE MANEJO DE UN SISTEMA ROBÓTICO PARA CIRUGÍA MÍNIMAMENTE INVASIVA.
Secciones de la CIP Técnicas industriales diversas y transportes Necesidades corrientes de la vida
(28/12/2017). Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: B25J13/02, A61B34/37.
Método de manejo de un sistema robótico para cirugía mínimamente invasiva que comprende: planificar una posición y orientación de un efector a partir del desplazamiento de un dispositivo háptico, de coordenadas de referencia y modeladas del efector y de estimación de posición del fulcro; obtener posiciones y velocidades articulares para que la unidad robótica localice la siguiente posición y orientación del efector; mover el efector; medir fuerzas y pares ejercidos por dicho efector y por un instrumento mínimamente invasivo al realizar dicho movimiento; determinar la contribución de dicha medición debida a la interacción con el punto de fulcro y con el tejido interno; estimar la distancia exterior a que se encuentra el punto de fulcro respecto del efector modelado; estimar la rigidez del tejido en contacto con el instrumento y calcular una fuerza de reacción simulada; enviarla al dispositivo háptico y a su vez a la mano del cirujano.
MÉTODO DE MANEJO DE UN SISTEMA ROBÓTICO PARA CIRUGÍA MÍNIMAMENTE INVASIVA.
Secciones de la CIP Técnicas industriales diversas y transportes Necesidades corrientes de la vida
(29/03/2017). Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: B25J13/02, A61B34/37.
Método de manejo de un sistema robótico para cirugía mínimamente invasiva que comprende: planificar una posición y orientación de un efector a partir del desplazamiento de un dispositivo háptico, de coordenadas de referencia y modeladas del efector y de estimación de posición del fulcro; obtener posiciones y velocidades articulares para que la unidad robótica localice la siguiente posición y orientación del efector; mover el efector; medir fuerzas y pares ejercidos por dicho efector y por un instrumento mínimamente invasivo al realizar dicho movimiento; determinar la contribución de dicha medición debida a la interacción con el punto de fulcro y con el tejido interno; estimar la distancia exterior a que se encuentra el punto de fulcro respecto del efector modelado; estimar la rigidez del tejido en contacto con el instrumento y calcular una fuerza de reacción simulada; enviarla al dispositivo háptico y a su vez a la mano del cirujano.
PDF original: ES-2607227_B2.pdf
PDF original: ES-2607227_A1.pdf
Sistema robótico de asistencia a la cirugía mínimamente invasiva de puerto único capaz de acomodar su movimiento a la anatomía de la pared abdominal.
(30/09/2015) Sistema robótico de asistencia a la cirugía mínimamente invasiva de puerto único con mecanismo de orientación activa capaz de acomodar su movimiento a la anatomía de la pared abdominal que comprende un robot extra-abdominal, que a su vez comprende un efector final que, mediante campos magnéticos, permite posicionar y orientar un dispositivo médico para uso intra-abdominal El robot extra-abdominal comprende además un controlador software capaz de implementar un método para el guiado automático del dispositivo médico para uso intra-abdominal que permite su adaptación a la anatomía de la pared abdominal; y un sistema interfaz de comunicación y control que permite ordenar las acciones deseadas al sistema. Preferentemente, el sistema comprende además un dispositivo médico para uso intra-abdominal, más preferentemente un robot inta-abdominal…
DISPOSITIVO ENDOSCÓPICO MAGNÉTICO.
Sección de la CIP Necesidades corrientes de la vida
(05/06/2014). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: A61B19/00.
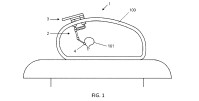
Dispositivo endoscópico magnético formado por una porción interna dotada de un instrumento quirúrgico , que una vez se encuentra en el interior de una cavidad del paciente permite manejar dicho instrumento a un cirujano y coger, cortar, etc. un órgano interno , y una porción externa que se encuentra en el exterior de dicha cavidad. La porción interna se maneja desde el exterior por medio de la porción externa gracias a un conjunto de pares de imanes que mantienen ambas porciones magnéticamente conectadas, no requiriendo por tanto de un puerto de entrada para su funcionamiento. El dispositivo permite manejar, a una persona o robot, diferentes tipos de instrumento quirúrgico desde el exterior del paciente y obtener diferentes ángulos de acceso a la región de interés (triangulación).
Dispositivo endoscópico magnético.
(08/04/2013) Dispositivo endoscópico magnético formado por una porción interna dotada de un instrumento quirúrgico , que una vez se encuentra en el interior de una cavidad del paciente permite manejar dicho instrumento a un cirujano y coger, cortar, etc. un órgano interno , y una porción externa que se encuentra en el exterior de dicha cavidad. La porción interna se maneja desde el exterior por medio de la porción externa gracias a un conjunto de pares de imanes que mantienen ambas porciones magnéticamente conectadas, no requiriendo por tanto de un puerto de entrada para su funcionamiento. El dispositivo permite manejar, a una persona o robot, diferentes tipos de instrumento quirúrgico desde el exterior del paciente y obtener diferentes ángulos de acceso a la región de interés (triangulación).
SISTEMA ROBOTICO CON CAPACIDAD TODOTERRENO Y BRAZO MANIPULADOR MULTIPLE, Y ELEMENTOS DE CONTROL Y SENSORIALES SEPARABLES Y AL MISMO TIEMPO FUNCIONALES.
(17/08/2011) Sistema robótico con capacidad todoterreno y brazo manipulador múltiple, y elementos de control y sensoriales separables y al mismo tiempo funcionales. El sistema consta de una plataforma móvil con tracción por medio de orugas, un sistema de control a bordo, un conjunto de sensores que obtienen información tanto del entorno como de la actitud del sistema robótico en su conjunto y un brazo manipulador múltiple. Este brazo permite al sistema manipular con destreza cargas de interés, como elementos peligrosos o víctimas de desastre. Gracias a que el sistema de control y el sistema sensorial son separables del sistema robótico pero mantienen su funcionalidad y comunican sus consignas y la información del entorno mediante enlaces por radio, la carga de pago del sistema…
SISTEMA DE SEGURIDAD PARA EL CONTROL DE USO DE EQUIPOS DE PROTECCION LABORAL INDIVIDUAL.
(08/04/2011) Sistema de seguridad para el control de uso de equipos de protección laboral individual.La presente invención se refiere a un sistema que vela por la seguridad de los trabajadores obligados al uso equipos reglamentarios de protección individual. El sistema de seguridad comprende los elementos que componen el equipo de protección individual (EPI) del usuario, un sistema de control central que permite determinar si cada sujeto usa todos los elementos que componen el EPI, y elementos que permitan en última instancia la comunicación entre los elementos del EPI y el sistema de control central . La no presencia o falta de uso de uno o más elementos del EPI determina en última instancia la emisión de una señal de alarma, que alerta al responsable del control de la seguridad e…
SISTEMA ROBOTIZADO PARA SERVICIO EN INVERNADEROS.
Secciones de la CIP Física Necesidades corrientes de la vida
(16/03/2005). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: G05D1/02, G06T1/00, A01B69/00, G08C21/00.
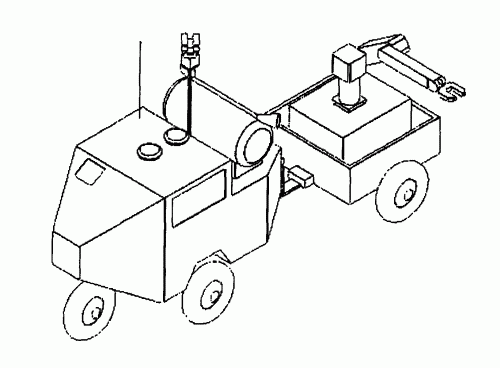
Sistema robotizado para servicio en invernaderos, caracterizado por una cabeza tractora autónoma, con capacidad sensorial y una estación para carga de pago, y un remolque también para carga de pago. El sistema puede portar diversos equipos necesarios para el trabajo en los invernaderos, como aparatos de fumigación, cámaras de inspección o brazos robot para recolección u otras tareas. El sistema puede moverse dentro del invernadero, bien autónomamente, gracias a un controlador y a sus sensores, entre los que puede contarse un sistema de posicionamiento global, bien según un plan establecido previamente, bien ser controlado remotamente por un operador humano con auxilio de cámaras de a bordo.
SISTEMA DE TELEOPERACION DE ROBOTS PARA CIRUGIA LAPAROSCOPICA.
(01/03/2005) Sistema de teleoperación de robots para cirugía laparoscópica, capaz de mover un instrumento quirúrgico en respuesta a las órdenes de un cirujano presente en el quirófano o situado en una localización distante. El sistema consta de un robot manipulador dotado de un efector final que permite sujetar un instrumento quirúrgico, un controlador para el robot integrado en la estructura del mismo, y un sistema de interfaz para ordenar las acciones deseadas al sistema. Este sistema de interfaz consta de un módulo anexo al controlador del robot, que interpreta las órdenes que el usuario desea que ejecute el robot, y unos medios para emitir dichas órdenes. Estos medios de entrada pueden encontrarse físicamente dentro del quirófano en el que se realiza la operación, o pueden situarse en un punto remoto, comunicado con el resto del sistema…
SISTEMA DE TELEOPERACION DE ROBOTS PARA RESECCION TRANSURETRAL DE LA PROSTATA.
Sección de la CIP Necesidades corrientes de la vida
(01/02/2005). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: A61B17/00.
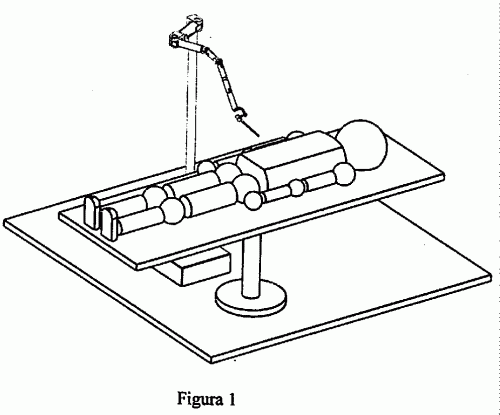
Sistema de teleoperación de robots para resección transuretral de la próstata, capaz de mover el resector en respuesta a las órdenes del cirujano. El sistema consta de un robot manipulador de al menos cuatro grados de libertad dotado de un efector final que permite sujetar el resector, un controlador para el robot, y un manipulador maestro que reproduce la forma del resector o que permite engarzar en él un resector real. Opcionalmente, puede contar con un computador que haga de interfaz entre el robot y el manipulador maestro, si la capacidad del controlador del robot utilizado no es suficiente. Como medios alternativos para mover el brazo robot puede contarse con un sistema de reconocimiento de voz o un teclado.
SISTEMA ROBOTICO ASISTENTE PARA CIRUGIA LAPAROSCOPICA.
Sección de la CIP Necesidades corrientes de la vida
(01/04/2004). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: A61B1/00, A61B17/00.
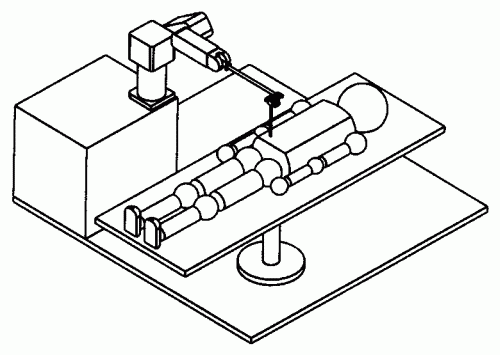
Sistema robótico asistente para cirugía laparoscópica, capaz de mover un instrumento quirúrgico en respuesta a las órdenes de un cirujano. El sistema consta de un robot dotado de un efector final que permite sujetar un instrumento quirúrgico, un controlador para el robot y un computador que permite interpretar las órdenes emitidas por el cirujano, bien mediante un sistema de reconocimiento de voz, bien mediante un teclado adosado al brazo robot.
SISTEMA ROBOTICO ASISTENTE PARA CIRUGIA LAPAROSCOPICA.
Sección de la CIP Necesidades corrientes de la vida
(16/08/2001). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Clasificación: A61B1/00, A61B17/00.
Sistema robótico asistente para cirugía laparoscópica, capaz de mover un instrumento quirúrgico en respuesta a las órdenes de un cirujano. El sistema consta de un robot industrial dotado de un efector final que permite sujetar un instrumento quirúrgico, un controlador para el robot industrial y un computador que permite interpretar las órdenes emitidas por el cirujano, bien mediante un sistema de reconocimiento de voz, bien mediante un teclado adosado al brazo robot.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}