Sistema de cambio de palé para una máquina herramienta.
(15/04/2020) Sistema de cambio de palé para una máquina herramienta (MT), que comprende:
- una estación de depósito y recogida de palés y una estación de carga y descarga de palés, separadas horizontalmente entre sí a lo largo de una primera dirección horizontal (A-A);
- una unidad de manipulación de palés, que incluye: o medios de guía horizontales que se extienden a lo largo de dicha primera dirección horizontal (A-A) entre la estación de depósito y recogida de palés y la estación de carga y descarga de palés,
• un par de montantes motorizados , que son movibles conjuntamente de una manera controlada 10 en dicha primera dirección horizontal (A-A) a lo largo de dichos medios de guía horizontales entre la estación de depósito…
Dispositivo para corrección de errores para máquinas CNC.
(30/10/2019) Un método para determinar un error de posicionamiento de una máquina CNC, en donde la máquina CNC está equipada con un elemento de calibración , estando el elemento de calibración en una primera posición, comprendiendo el método las etapas de:
leer primero datos de sensor emitidos por al menos un sensor mientras que el elemento de calibración se encuentra en la primera posición,
en donde los datos de sensor corresponden a una distancia entre un punto en la superficie del elemento de calibración y el al menos un sensor , o
en donde un elemento de contacto del al menos un sensor es desviado por el elemento de calibración y los datos de sensor corresponden a una distancia en la que se desvía el elemento de contacto;
…
Método y sistema para verificar la precisión de posicionamiento de una máquina CNC.
(26/06/2019) Método para verificar la precisión de posicionamiento de una máquina CNC , en particular, de una máquina de pórtico, con un cabezal de la máquina herramienta y una mesa de máquina , utilizando un sistema de coordenadas x, y, z, donde la coordenada z es la coordenada perpendicular a la superficie de la mesa de la máquina, comprendiendo el método las siguientes etapas:
a) disponer una pluralidad de recipientes en la mesa de la máquina, donde los recipientes están en conexión fluida entre sí para formar un sistema de recipientes de comunicación, donde el sistema de recipientes de comunicación se llena con un líquido ,
b) montar un sensor de distancia en el cabezal de la máquina herramienta,
c) colocar el cabezal de la máquina herramienta en una posición perpendicular…
Método para mover una herramienta de una máquina de CNC sobre una superficie.
Sección de la CIP Física
(31/05/2017). Solicitante/s: FIDIA S.P.A.. Clasificación: G05B19/416, G05B19/404, G05B19/401.
Método para mover una herramienta de una máquina de CNC sobre una superficie en el que la máquina de CNC está dotada de una unidad de sensor , que comprende las etapas de:
(a) mover la herramienta sobre la superficie en una dirección predeterminada y/o a lo largo de una trayectoria predeterminada,
(b) tratar la superficie mediante la herramienta según un valor predeterminado de un parámetro de tratamiento,
(c) determinar, mediante la unidad de sensor , un valor de respuesta que indica una respuesta de la herramienta al tratamiento de la superficie,
(d) determinar una nueva dirección y/o una nueva trayectoria basándose en el valor de respuesta,
estando el método caracterizado porque,
la etapa (d) se basa en un modelo de la superficie que se deriva de una medición llevada a cabo mientras se mueve la herramienta sobre la superficie, y
el modelo se basa en datos de trayectoria de la herramienta.
PDF original: ES-2636015_T3.pdf
Cabezal portaherramientas para máquinas herramientas.
(10/02/2016) Cabezal portaherramientas para una máquina herramienta, que comprende una primera estructura portadora en forma de horquilla , que tiene dos ramales o puntas (2a, 2b) enfrentados entre sí; una segunda estructura portadora , montada de manera giratoria entre los ramales (2a, 2b) de la estructura en forma de horquilla , alrededor de un primer eje (A-A) que es esencialmente ortogonal a los ramales o puntas (2a, 2b); una tercera estructura portadora montada de manera giratoria con respecto a la segunda estructura , alrededor de un segundo eje (B-B) que es ortogonal al primer eje (A-A); un huso portaherramientas montado de manera giratoria en la tercera estructura portadora alrededor de un tercer eje (C-C) que es ortogonal al segundo eje (B-B); y unos medios primeros…
SISTEMA Y PROCESO PARA MEDIR, COMPENSAR Y COMPROBAR CABEZALES DE UNA MAQUINA HERRAMIENTA CONTROLADA NUMERICAMENTE Y/O MESAS.
(16/02/2008) Sistema para medir, compensar y comprobar los cabezales de una máquina herramienta controlada numéricamente y/o mesas, caracterizado porque comprende: - al menos una base soporte equipada con una pluralidad de sensores de distancia ; - al menos un dispositivo del tipo herramienta de calibración compuesto por un cilindro alargado , estando equipado dicho cilindro en uno de sus extremos con un medio de conexión para dichos cabezales y estando equipado en el extremo opuesto con una bola , estando situada dicha bola próxima a dichos sensores de modo que son capaces, siempre y en cualquier posición, de medir la distancia que les separa desde dicha bola ; - en el que dicho sistema está acoplado…
SISTEMA DE CONEXION OPTICA.
(01/06/2005) Sistema ópticamente conectado para intercambiar datos entre dispositivos de automatización industrial que comprende una pluralidad de elementos de conexión (7, 9, 9´´, ..., 9N), caracterizado porque cada uno de dichos elementos de conexión (7, 9, 9´´, ..., 9N) con por lo menos dos pares de medios transmisores y receptores ópticos , estando compuesto cada par por un medio transmisor óptico dispuesto en el lado principal de cada uno de los elementos de conexión (7, 9, 9´´, ..., 9N) y de un medio receptor óptico colocado en un lado principal opuesto de cada uno de dichos elementos de conexión (7, 9, 9´´, ..., 9N), estando…
PROCEDIMIENTO Y APARATO PARA CREAR SECUENCIAS PARA MAQUINAS-HERRAMIENTAS CONTROLADAS NUMERICAMENTE.
(01/04/2004) Procedimiento para la creación de secuencias de directivas de trabajo para máquinas herramientas a control numérico, dicho procedimiento comprende las fases de: - Lectura de una descripción matemática de un objeto que se debe maquinar; - Preparación de una zona de trabajo para dicho objeto por un modelo matemático preestablecido; - Definición de los parámetros de maquinado basándose en el objeto que se debe maquinar y en la zona de trabajo preparada; - Creación de recorridos de maquinado basándose en dicha zona de trabajo preparada y en los parámetros de maquinado que han sido creados por el operador o modificados por el usuario final; y - Uso del control de máquina herramienta para dirigirla según los recorridos de maquinado creados por el operador o modificados por el usuario final; Caracterizado por el hecho…
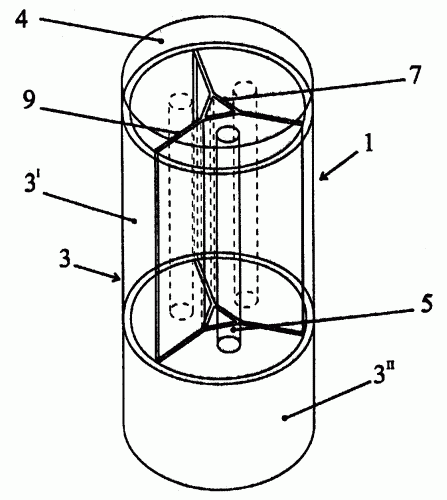
DISPOSITIVO DE ALUMBRADO Y SISTEMA DE ALUMBRADO QUE UTILIZA EL DISPOSITIVO.
Sección de la CIP Mecánica, iluminación, calefacción, armamento y voladura
(01/03/2003). Ver ilustración. Solicitante/s: MORFINO, GIUSEPPE. Clasificación: F21V7/00, F21S8/08, F21V21/30, F21V23/04.
SE DESCRIBE UN DISPOSITIVO DE ILUMINACION QUE COMPRENDE BASICAMENTE UNA ESTRUCTURA DE SOPORTE COMPUESTA AL MENOS PARCIALMENTE DE MATERIAL TRANSPARENTE; AL MENOS DOS MEDIOS DE ILUMINACION DISPUESTOS EN EL INTERIOR DE LA ESTRUCTURA , Y ALIMENTADOS ELECTRICAMENTE Y ACTIVADOS CADA UNO DE ELLOS CON INDEPENDENCIA DE LOS OTROS; UN ELEMENTO SEPARADOR Y REFLECTOR CONTENIDO EN EL INTERIOR DE LA ESTRUCTURA DE SOPORTE , ADAPTADO PARA SEPARAR ENTRE SI LOS MEDIOS DE ILUMINACION Y ADAPTADO TAMBIEN PARA REFLEJAR DE FORMA SELECTIVA AL EXTERIOR DEL DISPOSITIVO LA LUZ PROCEDENTE DEL MEDIO DE ILUMINACION . TAMBIEN SE DESCRIBE UN DISPOSITIVO DE ILUMINACION QUE COMPRENDE DICHO DISPOSITIVO.
PROCEDIMIENTO Y SISTEMA PARA COMPENSAR ERRORES ESTATICOS EN MAQUINAS HERRAMIENTAS CONTROLADAS NUMERICAMENTE.
(01/11/2002) Un procedimiento para realizar una Compensación de Error Estático en máquinas, particularmente máquinas herramienta controladas numéricamente, que comprende las siguientes operaciones: a. conectar un dispositivo láser de medición a un dispositivo de control de una máquina controlada numéricamente; b. posicionar un reflector de dicho dispositivo láser de medición en un punto cuya distancia absoluta es conocida, siendo llamado dicho punto, punto 0 para medidas, y enviar automáticamente el punto 0 de dicha máquina desde dicho dispositivo de control a dicho dispositivo láser de medición; c. enviar una orden para tomar un punto de medida de dicha máquina a partir de dicho dispositivo de control a dicho dispositivo láser de medición; d. detectar automáticamente dicho punto de medida por dicho dispositivo láser de medida después de…
{kind=link}