CIP-2021 : G05D 1/03 : que utilizan sistemas de transmisión por proximidad de campo, p. ej. del tipo de bucle inductivo.
CIP-2021 › G › G05 › G05D › G05D 1/00 › G05D 1/03[2] › que utilizan sistemas de transmisión por proximidad de campo, p. ej. del tipo de bucle inductivo.
G FISICA.
G05 CONTROL; REGULACION.
G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F).
G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
G05D 1/03 · · que utilizan sistemas de transmisión por proximidad de campo, p. ej. del tipo de bucle inductivo.
CIP2021: Invenciones publicadas en esta sección.
DISPOSITIVO DE SEGURIDAD PARA CICLISTAS.
(13/11/2014) 1. Dispositivo de seguridad para ciclistas caracterizado porque comprende:
- Un dispositivo emisor de una sola frecuencia, que será llevado por un ciclista y,
- un segundo dispositivo receptor de la frecuencia emitida anterior, de manera que el receptor al detectar o entrar en el radio de cobertura de la frecuencia emitida del dispositivo emisor, el receptor, emitiera una señal de aviso auditiva y/o luminosa, y que estará ubicado en un vehículo.
Donde el dispositivo emisor comprende:
- unos medios indicadores del estado de la alimentación y del estado de funcionamiento.
- Un pulsador de marcha/paro
- Unos medios de alimentación basado en baterías reemplazables o recargables,
- Unos…
(16/12/2006). Solicitante/s: SAAB AB. Inventor/es: HOLTER, HENRIK.
Una cinta transportadora sin fin para una planta de climatización, en la que la cinta transportadora se extiende de forma helicoidal, a lo largo de parte de su longitud, que comprende varillas transversales y elementos laterales , caracterizada porque los elementos laterales están conectados en pares, a solo dos varillas , que están conectadas de manera fija con los mencionados elementos laterales y forman, con estos, unos medios de conexión que tienen una estructura de armazón rígida en torsión, y los medios de conexión colindantes están articulados entre sí, mediante un elemento de acoplamiento que está dispuesto entre ambos, y está conectado de forma rotatoria con las varillas vecinas de los elementos de conexión colindantes.
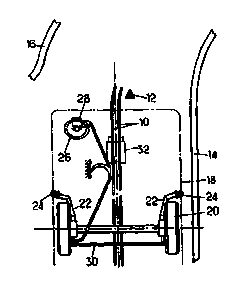
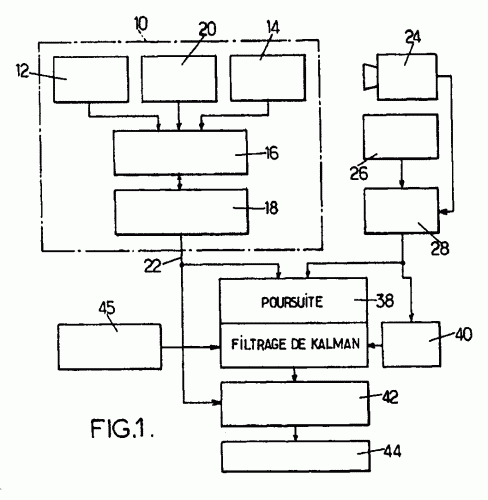
PROCEDIMIENTO Y DISPOSITIVO DE LOCALIZACION Y GUIADO DE UN MOVIL PROVISTO DE UNA CAMARA LINEAL.
(16/10/2004) Procedimiento de localización de un móvil provisto de una cámara tomavistas de tipo de formación lineal de elementos fotosensibles (CA), orientada en dirección conocida con relación a ejes de referencia relacionados con el móvil, medios de tratamiento de las imágenes, así como medios de captura de informaciones (ODO) relativas al desplazamiento del móvil (M), caracterizado porque comprende las etapas que consisten en: - a) repartir en la zona de evolución del móvil balizas (B1, B2) fijas, iluminadas intermitentemente de forma activa y/o pasiva, - b) a nivel del móvil (M), tomar a una cadencia seleccionada un par de imágenes lineales (IL1 e IL2) diferentes del mismo campo de imagen, una en la cual la o las balizas están iluminadas, otra en la cual la o las balizas no están iluminadas, - c) tratar…
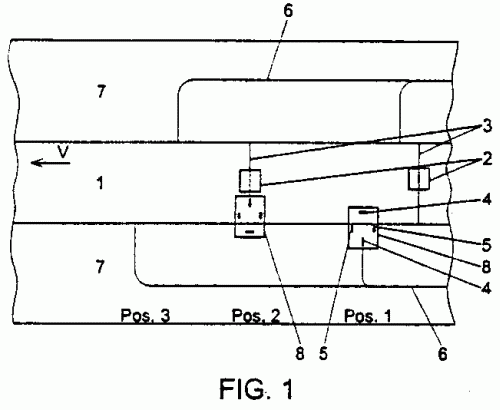
PROCEDIMIENTO Y DISPOSITIVO PARA LA DETECCION DE LA POSICION DE UN VEHICULO EN UNA ZONA ESPECIFICADA.
(01/02/2004) Procedimiento para la detección de la posición de un vehículo (F1-F4) en una zona especificada , en particular en una instalación de almacenamiento, que comprende estas etapas: detección de la magnitud y el ángulo de los vectores de movimientos incrementales del movimiento del vehículo (F1-F4) por medio de un primer dispositivo captador ; determinación automática de una posición de referencia respectiva del vehículo (F1-F4) en lugares predeterminados (O1-O4) dentro de la zona especificada cada vez que el vehículo (F1-F4) pasa por un lugar correspondiente (O1-O4); y detección de la posición actual del vehículo…
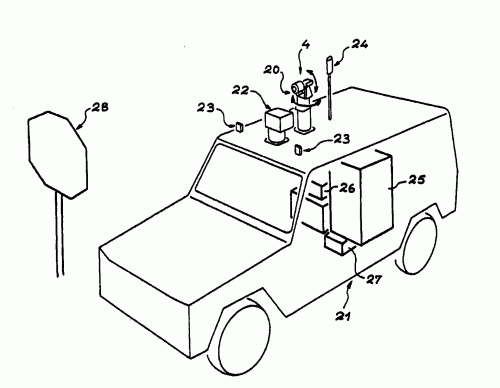
SISTEMA DE TRANSPORTE SIN CONDUCTOR.
(01/11/2003). Ver ilustración. Solicitante/s: INDUMAT GMBH & CO. KG. Inventor/es: DR. BOCKER,HEINER.
Sistema de transporte sin conductor para el transporte de cargas por medio de, como mínimo, un vehículo de transporte sin conductor FTF desde un suelo de transporte hasta encima de una cinta de montaje de desplazamiento relativo respecto al suelo, donde el FTF tiene tres ejes, pudiendo pivotar el eje anterior y el eje posterior (ruedas pivotantes 4). De esta forma el FTF puede subir parcialmente sobre la cinta , esperar y, finalmente, subirse por completo, sin modificar su dirección.
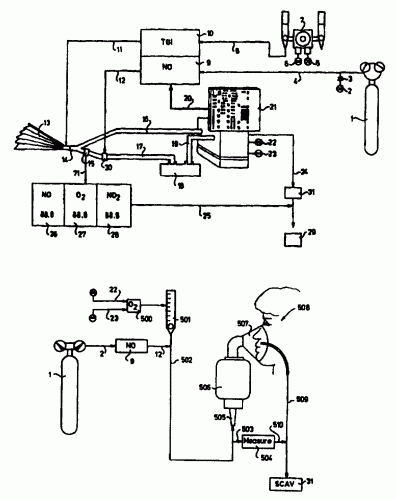
SISTEMA DE RESPIRACION CON UN MODULO DE ADMINISTRACION DE GAS ADICIONAL.
(01/08/2003). Ver ilustración. Solicitante/s: KOSTER, HENK W. Inventor/es: LUGTIGHEID, GERARD, GROOTENDORST, ALBERT.
UN SISTEMA DE VENTILACION PARA VENTILAR PACIENTES QUE COMPRENDE UN MODULO DE ADMINISTRACION DE GAS PARA ADMINISTRAR UNA CANTIDAD PREDETERMINADA DE UN GAS ADICIONAL, TAL COMO NO, A DICHO PACIENTE, COMPRENDIENDO DICHO MODULO DE ADMINISTRACION DE GAS UN NUMERO PREDETERMINADO DE ELEMENTOS DE VALVULA PARALELOS (42/50, ..., 49/57) TENIENDO CADA UNO DE ELLOS UNA VALVULA REGULADORA Y UNA VALVULA CONTROLADA EN SERIE, SIENDO EL VOLUMEN INTERNO ENTRE LA VALVULA REGULADORA Y LA VALVULA CONTROLADA TAN PEQUEÑO QUE NO PUEDAN TENER LUGAR EFECTOS INTERFERENTES DEBIDO A LA ABERTURA O CIERRE DE LA VALVULA CONTROLADA A UNA FRECUENCIA INFERIOR A LA FRECUENCIA MAXIMA. PREFERENTEMENTE, EL SISTEMA COMPRENDE TAMBIEN UN MODULO DE INSUFLACION TRAQUEAL DE GAS (TGI) Y UN SISTEMA DE MEDICION PARA MEDIR LA CONCENTRACION DEL GAS ADICIONAL.
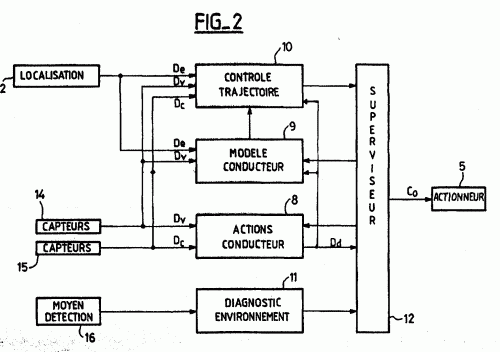
SISTEMA DE MANDO DE UNA DIRECCION INTELIGENTE DE VEHICULO AUTOMOVIL.
(16/07/2003). Ver ilustración. Solicitante/s: RENAULT. Inventor/es: ZALILA, ZYED, BONNAY, FREDERIC, COFFIN, FLORENT, LADREYT, THIERRY.
LA INVENCION SE REFIERE A UN SISTEMA DE CONTROL DE LA DIRECCION DE UN VEHICULO A MOTOR CON UN DISPOSITIVO DE LOCALIZACION Y UNA CALCULADORA ELECTRONICA A BORDO, QUE EMITE UNA CONSIGNA DESTINADA A ACCIONADORES PARA ALCANZAR EL POSICIONAMIENTO OPTIMO DEL VEHICULO EN UNA VIA DE CIRCULACION, Y QUE COMPRENDE: - UN MODULO DE DIAGNOSTICO DEL ESTILO DE CONDUCCION Y ACCIONES VOLUNTARIAS DEL CONDUCTOR. - UN MODULO DE MODELIZACION DEL COMPORTAMIENTO CONDUCTOR, QUE EMITE UNA TRAYECTORIA DE REFERENCIA; - UN MODULO DE CONTROL DE LA TRAYECTORIA QUE CONTROLA AUTOMATICAMENTE EN UNA TRAYECTORIA DE REFERENCIA, MODULO AUTOADAPTATIVO AL ENTORNO Y AL CONDUCTOR MISMO; - UN MODULO DE DIAGNOSTICO DEL ENTORNO VEHICULO/CONDUCTOR; - UN MODULO DE SUPERVISION DE DESENFOQUE , QUE RECIBE Y GARANTIZA EL INTERCAMBIO DE INFORMACION NECESARIA PARA LOS DIFERENTES MODULOS.
SISTEMA DE ASISTENCIA A LA CONDUCCION DE UN VEHICULO, EN PARTICULAR PARA LA APROXIMACION A UN MUELLE.
(01/05/2003) Sistema de ayuda a la conducción de un vehículo sobre una calzada, especialmente, para la aproximación a un muelle de una estación , caracterizado porque comprende: - un marcado codificado que está dispuesto en la calzada a la entrada de la estación y en toda su longitud según un trazado determinado, - un dispositivo de detección del marcado codificado a bordo del vehículo, que suministra informaciones de posición del citado vehículo con respecto al marcado codificado, - un dispositivo de cálculo , para calcular, durante la entrada en estación , la trayectoria del citado vehículo a partir de las informaciones de tipo de estación facilitadas por el marcado, de posición (am,Om) facilitadas por el dispositivo de detección, de velocidad del vehículo y…
PROCEDIMIENTO DE GRADUACION DE LA POSICION Y LA ORIENTACION INICIAL DE UNA O VARIAS CAMARAS MOVILES.
(16/02/2003). Ver ilustración. Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE. Inventor/es: ARNOUL, PATRICK, GUERIN, JEAN-PIERRE, LETELLIER, LAURENT, VIALA, MARC.
PROCEDIMIENTO PARA CALIBRAR UNA CAMARA DISPUESTA EN UN SOPORTE MOVIL . LA CAMARA COMPRENDE UNA IMAGEN DE UNA MIRA FORMADA POR ALMENOS TRES MARCAS QUE APARECEN EN EL CAMPO DE LA CAMARA Y EL ANALISIS DE LA IMAGEN PROPORCIONA LA POSICION Y LA ORIENTACION ORIGINALES DE LA CAMARA RESPECTO A LA DE LA MIRA QUE SE CONOCEN EN UNA APLICACION. EL SOPORTE PUEDE ENTONCES DESPLAZARSE HACIA UN OBJETO CUYA CAMARA TOMA IMAGENES. COMO LOS DESPLAZAMIENTOS DEL SOPORTE SE MIDEN CON PRECISION, EL ANALISIS DE LAS IMAGENES DEL OBJETO PROPORCIONA LA POSICION Y LA ORIENTACION PRECISAS DEL OBJETO RESPECTO A LA CAMARA Y RESPECTO A LA MIRA. UNA APLICACION ES LA INSPECCION DE PANELES DE CARRETERA PARA CONSTITUIR BASES DE DATOS DE GESTION DE LA RED O PARA SISTEMA DE NAVEGACION EMBARCADO.
INSTALACION DE TRANSPORTE CON GUIADO OPTICO Y MECANICO.
(01/04/2002). Ver ilustración. Solicitante/s: MATRA TRANSPORT INTERNATIONAL MATRA SYSTEMES ET INFORMATION. Inventor/es: FERBECK, DANIEL, REBUFFET, MICHEL.
LA INSTALACION COMPRENDE UNA VIA DE CIRCULACION EN LA QUE AL MENOS CIERTAS SECCIONES ESTAN DOTADAS DE UNA MARCACION LONGITUDINAL DE REFERENCIA PARA LA TRAYECTORIA NOMINAL Y DE VEHICULOS DE LOS QUE CADA UNO LLEVA UN CONJUNTO DE GUIADO POR CONTROL DEL EJE DE DIRECCION, QUE TIENE UN MODULO DE FORMACION DE UNA IMAGEN DE LA VIA POR DELANTE DEL VEHICULO Y DE EXPLOTACION DE LA IMAGEN DE MARCACION Y UN MODULO DE GUIADO OPTICO QUE CALCULA LA ORIENTACION QUE HAY QUE DAR A LAS RUEDAS DEL EJE DE DIRECCION PARA SEGUIR LA TRAYECTORIA NOMINAL Y UN SERVOMOTOR DE OBLICUIDAD CONTROLADO POR EL MODULO DE GUIADO. LA VIA LLEVA, AL MENOS EN CIERTA SECCIONES, GUIAS LATERALES Y LOS VEHICULOS, CUYO EJE DELANTERO ES AL MENOS DE DIRECCION, ESTAN DOTADOS EN CADA EJE, DE RODILLOS DE EJE VERTICAL DESTINADOS A APOYARSE SOBRE LAS GUIAS EN CASO DE DESVIACION EXCESIVA RESPECTO A UNA TRAYECTORIA NOMINAL SOBRE LA VIA.
SISTEMA Y DISPOSITIVO PARA UN DISPOSITIVO DE ORIENTACION AUTOMATICA.
(01/03/2002) LA INVENCION REVELA UN SISTEMA DETECTOR DE PROXIMIDAD Y UN APARATO AUTONOMO, COMO UNA ASPIRADORA, QUE SE ESTABLECE CON UN PAR DE RUEDAS CONDUCIDAS INDEPENDIENTES . EL APARATO CONTIENE PARA EL GUIADO Y LA ORIENTACION DE PROXIMIDAD UN SISTEMA DE MICROPROCESADOR Y UN SISTEMA DE SONAR QUE COMPRENDE AL MENOS UN TRANSMISOR DE ULTRASONIDOS Y UN RECEPTOR DE ULTRASONIDOS. TAMBIEN SE UTILIZA UN SENSOR TACTIL MECANICO ADICIONAL EN FORMA DE PARAGOLPES QUE SOBRESALE HACIA ADELANTE QUE LLEVA EL TRANSMISOR Y MICROFONOS RECEPTORES. EL PARAGOLPES MECANICO ACCIONA AL MENOS UN SENSOR TACTIL SI EL APARATO ENTRA EN CONTACTO…
PROCEDIMIENTO Y DISPOSITIVO DE IDENTIFICACION Y DE LOCALIZACION DE OBJETOS FIJOS A LO LARGO DE UN TRAYECTO.
(01/11/2001). Ver ilustración. Solicitante/s: SAGEM S.A. COMMISSARIAT A L'ENERGIE ATOMIQUE. Inventor/es: ARNOUL, PATRICK, GUERIN, JEAN-PIERRE, VIALA, MARC, DE CREMIERS, MICHEL, SALLE, STEPHANE.
EL PROCEDIMIENTO PERMITE IDENTIFICAR Y LOCALIZAR OBJETOS REPARTIDOS A LO LARGO DE UN TRAYECTO A PARTIR DE IMAGENES PROPORCIONADAS POR AL MENOS UNA CAMARA FIJADA SOBRE UN VEHICULO. SE MIDE LA POSICION Y LA ORIENTACION DEL VEHICULO TERRESTRE POR NAVEGACION POR INERCIA Y POR POSICIONAMIENTO GPS Y SE VAN RECONOCIENDO LOS SUCESIVOS OBJETOS A LOCALIZAR MEDIANTE COMPARACION DEL CONTENIDO DE LAS IMAGENES CON UNA BIBLIOTECA MEMORIZADA O MEDIANTE PUNTEO SOBRE UNA IMAGEN. SE PERSIGUE CADA OBJETO RECONOCIDO EN N IMAGENES SUCESIVAS PROPORCIONADAS POR LA O LAS CAMARAS POR PREDICCION, TENIENDO EN CUENTA EL DESPLAZAMIENTO DEL VEHICULO, Y SE CALCULA LA POSICION DEL OBJETO EN LA LOCALIZACION TERRESTRE A PARTIR DE LAS MEDICIONES DE POSICION Y DE ORIENTACION EN CADA INSTANTE DE CAPTURA DE LAS IMAGENES SUCESIVAS Y DE LA POSICION DEL OBJETO EN LAS IMAGENES.
METODO Y APARATO PARA GUIAR UN VEHICULO SIN CONDUCTOR.
(16/08/2000). Solicitante/s: JERVIS B. WEBB INTERNATIONAL COMPANY. Inventor/es: ALOFS, CORNELL W., DRENTH, RONALD R.
METODO Y APARATO PARA DIRIGIR UN VEHICULO SIN CONDUCTOR A LO LARGO DE UN CAMINO DEFINIDO POR UN CABLE GUIA , QUE LLEVA UNA CORRIENTE EN UNA SUPERFICIE DE CARRETERA HORIZONTAL E INCLUYE EL MONTAJE DE UNA PRIMERA BOBINA , CON UN EJE PRINCIPAL DE BOBINA, A +45 GRADOS CON RESPECTO A LA HORIZONTAL EN EL VEHICULO , EL MONTAJE DE UNA SEGUNDA BOBINA , CON UN EJE PRINCIPAL DE BOBINA, A -45 GRADOS CON RESPECTO A LA HORIZONTAL DEL VEHICULO , DE MANERA QUE LOS EJES DE LA PRIMERA Y SEGUNDA BOBINAS (18 Y 20) SE INTERSECTAN, DETECTANDO LOS VECTORES DE CAMPO RADIAL Y CIRCULAR DEL CAMPO ELECTROMAGNETICO CON CADA BOBINA (18 O 20), COMPARANDO LA MAGNITUD DEL VECTOR RADIAL CON LA DEL CIRCULAR PARA CADA BOBINA (18 O 20), POR LO QUE SE DETERMINA LA POSICION LATERAL DEL PUNTO DE INTERSECCION DE LOS EJES DE LAS BOBINAS (18 Y 20), CON RESPECTO AL CABLE GUIA PARA INDICAR LA DESVIACION LATERAL DEL VEHICULO CON RESPECTO A LA VIA, Y UTILIZANDO LA INFORMACION DE DESVIACION PARA EL SISTEMA DE MARCHAS DEL VEHICULO.
SISTEMA DE GUIADO DE VEHICULOS AUTONOMOS POR SENSOR FOTOVOLTAICO DE DESVIO.
(16/05/2000). Solicitante/s: UNIVERSIDAD DE A CORUÑA. Inventor/es: FERREIRO GARCIA,RAMON, VIDAL PAZ,JOSE.
Sistema de guiado de vehículos autónomos por sensor fotovoltaico de desvío. El objeto de la invención es el guiado de vehículos autónomos de avance o desplazamiento sobre superficie sólida mediante uno o más sensores fotovoltaicos que detectan el desvío entre la posición del vehículo y el haz luminoso de la trayectoria deseada. El principio de captación de posición, independientemente del modo de captación, es siempre fotovoltaico, como se detalla en las figuras 4(a), 4(b) y 4(c) en donde se proponen 3 métodos diferentes de guiado.
SISTEMA PARA EL CONTROL AUTOMATICO DEL RECORRIDO EN LOS CARROS DE TRANSPORTE AUTOPROPULSADOS DE GUIADO AUTOMATICO.
(16/04/2000) Sistema para el control automático del recorrido en los carros de transporte autopropulsados de guiado automático. El carro comprende medios para variar su dirección, para mantener con su eje (A) alineado con un recorrido fijo preestablecido; una pista fija está constituida por una pluralidad de primeros imanes dispuestos en el suelo; el carro comprende un primer dispositivo de detección , para detectar el desplazamiento del eje (A) con respecto a los primeros imanes y hacer variar la dirección a fin de anular el desplazamiento; a lo largo de la pista está dispuesta una pluralidad de segundos imanes , en posiciones prefijadas de control/referencia, con un campo magnético distinto al de los primeros imanes ; sobre el carro está dispuesto un segundo dispositivo de detección , en correspondencia de un centro de referencia (P), para detectar…
DISPOSITIVO DE CONTROL PARA PISTAS DE CARRERAS DE VEHICULOS DE JUGUETE.
(16/08/1999) 1. DISPOSITIVO DE CONTROL PARA PISTAS DE CARRERAS DE VEHICULOS DE JUGUETE, EN ESPECIAL PARA PISTAS MULTIPLES, CERRADAS SOBRE SI MISMAS, EN LAS QUE CADA VEHICULO DE JUGUETE DISPONE DE SU PROPIO CIRCUITO, PARALELO AL DE LOS RESTANTES, CARACTERIZADO POR ESTAR CONSTITUIDO, PARA CADA UNA DE LAS PISTAS, A PARTIR DE UN SENSOR DE PASO, QUE POR EFECTO DEL PASO DEL VEHICULO GENERA UNA SEÑAL SUMINISTRADA A UN CIRCUITO CONTADOR, DOTADO DE MEDIOS DE PUESTA A CERO Y CON EL QUE COLABORA UN VISOR, COMO UN EJEMPLO UN DISPLAY, QUE REFLEJA GRAFICAMENTE EL NUMERO DE VECES QUE EL VEHICULO A PASADO SOBRE EL SENSOR, ES DECIR, EL NUMERO DE VUELTAS REALIZADAS POR EL MISMO. 2. DISPOSITIVO DE CONTROL PARA PISTAS DE CARRERAS DE VEHICULOS DE JUGUETE, SEGUN REIVINDICACION 1, CARACTERIZADO PORQUE EL CITADO SENSOR DE PASO ESTA ESTRUCTURADO A BASE DE DOS LAMINAS ELECTROCONDUCTORAS…
APARATO DE DETERMINACION DE POSICION DE VEHICULO.
(16/04/1999) APARATO PARA DETERMINAR LA POSICION DE UN VEHICULO MOVIL RESPECTO DE UN DISPOSITIVO MARCADOR DE SITUACION FIJA QUE COMPRENDE UNA BOBINA EXCITADA PARA EMITIR UN CAMPO MAGNETICO COMPUESTO DE LINEA DE FLUJO MAGNETICO QUE SE EXTIENDEN RADIALMENTE Y PRECISAMENTE DESDE LOS EXTREMOS DEL EJE LONGITUDINAL DE BOBINA . UNA UNIDAD DETECTORA MONTADA SOBRE EL VEHICULO MOVIL COMPRENDE CUATRO BOBINAS DE DETECCION IDENTICAS (A,B,C,D) QUE RESPONDE CADA UNA A LA FRECUENCIA DEL CAMPO MAGNETICO DEL DISPOSITIVO MARCADOR Y QUE TIENEN CADA UNO UN EJE MAYOR . ESTAS BOBINAS DETECTORAS (A;B;C;D) SON SOPORTADAS EN DOS PARES (AB, Y CD) CON EL EJE MAYOR DE LA BOBINA DETECTORA DE CADA PAR (A,B Y C,D) DISPUESTO EN CUALQUIER LADO DE UN PLANO CENTRAL COMUN Y QUE SE EXTIENDE PARALELAMENTE A ESTE, EXTENDIENDOSE ESTE…
SISTEMA FOTOMETRICO AUTOMATICO APLICABLE A VEHICULOS.
(16/02/1999) SISTEMA FOTOMETRICO AUTOMATICO APLICABLE A VEHICULOS. EL SISTEMA INCLUYE A CADA LADO DEL VEHICULO (V) Y EN CORRESPONDENCIA CON LA PARTE DELANTERA INFERIOR DEL MISMO, UN EMISOR O FUENTE DE LUZ QUE PROYECTA UN RAYO DE LUZ CONCENTRADO CUYA DIRECCION ES TAL QUE AL INCIDIR SOBRE EL SUELO, CONCRETAMENTE EN EL ASFALTO SOBRE EL QUE CIRCULA EL VEHICULO (V), SE PROYECTE HACIA UN FOTOMETRO , ESTANDO ESTE CAPACITADO DE CAPTAR O NO CAPTAR ESA LUZ REFLEJADA DEPENDIENDO DE LA INTENSIDAD DE LA MISMA. CUANDO EL RAYO DE LUZ PROYECTADO POR EL EMISOR INCIDE SOBRE EL ASFALTO NORMAL LA INTENSIDAD DE LUZ ES INSUFICIENTE PARA QUE SEA CAPTADA POR EL FOTOMETRO , MIENTRAS QUE SI ESE RAYO DE LUZ INCIDE SOBRE LAS CLASICAS BANDAS DE PINTURA REFLECTANTES DE SEÑALIZACION…
METODO PARA DETERMINAR LA POSICION EXACTA DE UN VEHICULO MOVIENDOSE EN UN ESPACIO ABIERTO Y APARATO QUE EMPLEA DICHO METODO PARA EL CONTROLA DISTANCIA DEL VEHICULO.
(01/04/1998). Solicitante/s: MILANI, CARLO. Inventor/es: MILANI, CARLO, MORETTO, GIANANTONIO.
UN METODO PARA DETERMINAR LA POSICION DE UN VEHICULO MOVIL PROVISTO CON UN RECEPTOR, A TRAVES DE UNA TRIANGULACION LLEVADA A CABO POR DICHO RECEPTOR EN BASE A LOS DATOS ANGULARES OBTENIDOS PROCESANDO LAS SEÑALES ELECTROMAGNETICAS DIRECTIVAS MODULADAS EMITIDAS POR AL MENOS DOS TRANSMISORES ROTATORIOS (E1,E2); LOS DATOS TRANSMITIDOS POR LOS TRANSMISORES ESTAN CODIFICADOS DE TAL MANERA QUE ES POSIBLE UNA GRAN RESOLUCION EN LA MEDICION ANGULAR EN EL RECEPTOR. UN APARATO EMPLEA DICHO METODO PARA EL CONTROL REMOTO DE UN VEHICULO QUE INCLUYE UNA PLURALIDAD DE UNIDADES PROCESADORAS E INTERCONEXIONES MONTADAS EN EL VEHICULO Y UTILES PARA LLEVAR A CABO LAS FUNCIONES DIRECCIONALES Y DE CONTROL DEL MISMO, ADEMAS DE UN SISTEMA DE COMUNICACION TRANSCEPTOR CONECTADO A DICHO SISTEMA DE CONTROL Y DIRECCION, Y CONSTITUIDO POR DOS PARES DE TRANSCEPTORES UNIDOS A UN MODEM, UNO DE LOS CUALES FORMA PARTE DE UNA ESTACION BASE OPERADA POR UN CONTROLADOR.
SISTEMA DE CONTROL REMOTO PROGRAMABLE PARA UN VEHICULO.
(01/04/1998). Solicitante/s: ZELTRON S.P.A. Inventor/es: DRIUS, FRANCESCO, GIORDANO, ROBERTO.
SISTEMA DE CONTROL REMOTO PROGRAMABLE PARA UN VEHICULO EQUIPADO CON SUS PROPIOS MEDIOS DE PROPULSION Y DE DIRECCION QUE ESTAN ADAPTADOS PARA SER CONTROLADOS MEDIANTE MEDIOS DE CONTROL REMOTO , COMPRENDIENDO DICHO SISTEMA UNA CAMARA DE TELEVISION QUE TOMA LAS IMAGENES DE UN AREA OPERATIVA , EN LA CUAL DICHO VEHICULO ESTA SITUADO, Y LLEVA CON UNA SEÑAL DE VIDEO CORRESPONDIENTE UN ORDENADOR PERSONAL EN EL QUE UN PROGRAMA OPERATIVO PUEDE ESTABLECERSE DE ACUERDO CON CUAL DICHO ORDENADOR ES CAPAZ DE CONTROLAR A DISTANCIA EL MOVIMIENTO DE DICHO VEHICULO. EL ORDENADOR PERSONAL ES CAPAZ DE ALMACENAR EN EL PROGRAMA OPERATIVO UNA ZONA DE MOVIMIENTO , DENTRO DE LA CUAL DICHO VEHICULO ES CONTROLADO PARA MOVERSE. EL VEHICULO ESTA PROVISTO CON MEDIOS DE RECONOCIMIENTO OPTICOS CODIFICADOS QUE EL ORDENADOR PERSONAL DETECTA DE MODO A DETERMINAR SU POSICION INSTANTANEA DENTRO DE DICHA ZONA DE MOVIMIENTO Y CONDUCIR EL VEHICULO CON SEÑALES DE ERROR CORRESPONDIENTES, DE ACUERDO CON EL PROGRAMA OPERATIVO.
DISPOSITIVO DE GUIA DE VEHICULOS EN UNA VIA NO MATERIALIZADA.
(01/02/1998). Solicitante/s: GEC ALSTHOM SA. Inventor/es: DUHOT, DENIS, HEDDEBAUT, MARC, DEGAUQUE, PIERRE.
DISPOSITIVO DE GUIA DE VEHICULOS EN UNA VIA NO MATERIALIZADA, GRACIAS AL CAMPO MAGNETICO EMITIDO POR UN ORGANO EMISOR DE ESTE CAMPO DISPUESTO EN ELEJE DE LA VIA A SEGUIR, Y QUE CONSTA DE DOS CAPTADORES MAGNETICOS DE RECEPCION DEL CAMPO DISPUESTOS EN EL VEHICULO. EL ORGANO EMISOR DEL CAMPO ES UNA GUIA DE ONDAS ENLAZADA PARA LA DETERMINACION DEL DESPLAZAMIENTO LATERAL EN RELACION AL EJE DE LA VIA DE UN EMISOR DE RADIACION ELECTROMAGNETICA A UNA FRECUENCIA COMPRENDIDA ENTRE 1 Y 100 KHZ.
DISPOSITIVO DE POSICIONAMIENTO.
(01/08/1996). Solicitante/s: ELEKTRICITEIT VOOR GOEDERENBEHANDELING MARINE EN INDUSTRIE, IN HET VERKORT EGEMIN, NAAMLOZE VENNOOT. Inventor/es: VAN DE PAS, LEO, VANHOUTTE, RUDI.
UN DISPOSITIVO DE POSICIONAMIENTO QUE SE CARACTERIZA PORQUE TIENE UN DISPOSITIVO DE EXPLORACION LINEAL Y POR LO MENOS UN SOPORTE CON LA MENOS UNA LINEA DE CODIGO DE CONTRASTE SOBRE EL DE LA CUAL UNA PARTE UTIL SE DIRIGE SEGUN UN ANGULO DISTINTO DE CERO Y DE 90 GRADOS RESPECTO AL DISPOSITIVO DE EXPLORACION Y CON POR LO MENOS UNA LINEA EXTRA FORMANDO UNA LINEA DE REFERENCIA Y FORMANDO UN ANGULO DISTINTO DE CERO Y DE 90 GRADOS CON RESPECTO A LA LINEA DE CODIGO , CON LO QUE LA POSICION RELATIVA DE LAS LINEAS ARRIBA MENCIONADAS (3 Y 7) PUEDE SER LEIDA POR EL DISPOSITIVO DE EXPLORACION.
SISTEMA DE CONTROL DE ACCIONAMIENTO DE UN CARRO.
(01/04/1996). Solicitante/s: DAIFUKU CO., LTD.. Inventor/es: TANIZAWA, HIDEICHI, WATANABE, YOSHITAKA, IWAMA, MICHIO.
UN SISTEMA DE CONTROL DE ACCIONAMIENTO DE UN CARRO INCLUYE UNA PLURALIDAD DE MEDIOS DE MEMORIA DE LECTURA Y ESCRITURA (T) INSTALADOS A LO LARGO DE UN CAMINO DE ACCIONAMIENTO DE CARROS (A). CADA CARRO (A) ES CAPAZ DE COMUNICAR INFORMACION CON EL MEDIO DE MEMORIA (T). LA VIA DE ACCIONAMIENTO INCLUYE ZONAS ESPECIALES TALES COMO SECCIONES CURVADAS (P), SECCIONES RAMIFICADAS (D), SECCIONES DE FUSION (J), Y SECCIONES QUE INCLUYEN ESTACIONES (ST). CUANDO HAY UN CARRO PRECEDENTE PRESENTE EN UNA DE ESTAS ZONAS ESPECIALES, EL MEDIO DE MEMORIA (T) DISPUESTO EN EL EXTREMO DE ENTRADA DE ESTA ZONA PROPORCIONA INFORMACION DE PRESENCIA A UN CARRO SUCESIVO (A2) PARA IMPEDIR AL ULTIMO ENTRAR EN LA ZONA. HAY UN DETECTOR (SW) DISPUESTO EN EL EXTREMO DE SALIDA DE CADA ZONA DICHA PARA DETECTAR LA SALIDA DE CARROS Y (A) RESTABLECER EL MEDIO DE MEMORIA (T) EN EL EXTREMO DE ENTRADA.
SISTEMA Y PROCEDIMIENTO DE DIRECCION PARA VEHICULO AUTONOMO.
(16/08/1994). Solicitante/s: PROTEE GROUPEMENT D'INTERET ECONOMIQUE. Inventor/es: LEMERCIER, PIERRE, TRYSTRAM, PHILIPPE.
SISTEMA DE DIRECCION PARA UN VEHICULO AUTONOMO. ESTA DOTADO DE UNA FILA LATERAL DE DETECTORES . EL SUELO DEL VEHICULO CONSTA DE BALIZAS MAGNETICAS DISCONTINUAS ENTERRADAS QUE CREAN UN CAMPO LOCALIZADO QUE ENGENDRA A SU VEZ UNA CORRIENTE INDUCIDA VARIABLE EN LOS DETECTORES SEGUN SU POSICION. LOS BORNES, FORMADOS POR IMANES (151 A 155) DE POLARIDAD Y EN NUMERO SELECCIONADOS, CONSTITUYEN SEÑAS MAGNETICAS QUE CONTIENEN INFORMACIONES PARA EL VEHICULO. EL CALCULADOR INCORPORADO AL VEHICULO PUEDE DEDUCIR SU POSICION LATERAL Y LAS ORDENES A DAR PARA CUMPLIR SU MISION. APLICACION POSIBLE: ROBOTS DE LIMPIEZA DE TRAYECTO FIJO O MODIFICABLE SIN GRABACION DE TRAYECTORIA POR EL VEHICULO.
CONTROL DE VEHICULO AUTOMATICO.
(16/01/1994) EN UN SISTEMA DE GUIADO PARA GUIAR UN VEHICULO AUTOMATICO EN UN AREA TAL COMO UN ALMACEN, UN HAZ DE LASER PROCEDENTE DE UNA FUENTE MONTADA SOBRE EL VEHICULO INCIDE SOBRE REFLECTORES SITUADOS EN EL CONTORNO DEL AREA. CADA REFLECTOR INCORPORA UN CODIGO OPTICO QUE LO IDENTIFICA. LA LUZ LASER REFLEJADA POR LOS REFLECTORES VUELVE AL VEHICULO Y SE EMPLEA PARA CONTROLAR SU MOVIMIENTO Y DIRECCION. EL AREA ES DIVIDIDA IDEALMENTE EN UN NUMERO DE SUB-AREAS IGUALES DE DIMENSIONES PREDETERMINADAS, CADA UNA CON DOS REFLECTORES CODIFICADOS DIFERENTES, POR LO MENOS. EL VEHICULO ES LLEVADO INICIALMENTE A UNA POSICION DESDE LA QUE PUEDE HACER UN BARRIDO PARA INICIALIZAR LOS REFLECTORES SITUADOS EN POSICIONES SELECCIONADAS DE INICIALIZACION.…
(01/05/1993) DETECTOR DE POSICION QUE CONSTA DE DOS ESTACIONES BASE ESPACIADAS A UNA DISTANCIA CONOCIDA SOBRE UNA LINEA DE REFERENCIA L. CADA ESTACION BASE CONSTA DE GENERADORES (2(A), 2(B)) QUE EMITEN UN RAYO LASER GIRATORIO. ESTOS RAYOS LASER GIRATORIOS SON DETECTADOS POR UN SENSOR MOVIL Y UNOS SENSORES DE REFERENCIA (7(A), 7(B)) QUE ESTAN ASOCIADOS CON LOS GENERADORES (2(A), 2(B)) Y SITUADOS EN LA LINEA DE REFERENCIA L. SE DETERMINA LA DIFERENCIA DE TIEMPO ENTRE LA DETECCION DE CADA RAYO LASER POR LOS SENSORES MOVIL Y DE REFERENCIA (7(A), 7(B)) Y SE UTILIZA PARA CALCULAR LOS ANGULOS POSICIONALES Y ENTRE LINEAS DE POSICION ENTRE EL SENSOR MOVIL Y CADA ESTACION BASE Y LA LINEA DE REFERENCIA L. AL EXISTIR SOLO DOS RAYOS LASER…
SISTEMA AUTOMATICO DE GUIA DE VEHICULOS Y DISPOSITIVO DETECTOR DE RUMBO PARA ESTE SISTEMA.
(01/12/1989). Ver ilustración. Solicitante/s: THE SECRETARY OF STATE FOR TRADE AND INDUSTRY IN HER BRITANIC MAJESTY'S GOVERMENT OF THE GB. Inventor/es: JACKSON, DOUGLAS, ROBERTSON, ANDREW RAE.
SISTEMA AUTOMATICO DE GUIA DE VEHICULOS, EN EL QUE SE EMPLEA UN DISPOSITIVO DETECTOR DE RUMBO, QUE TIENE UNA LENTE, TAL COMO UNA LENTE TIPO OJO DE PEZ O UNA LENTE REFLECTORA ESFERICA , QUE TIENE UN ANGULO VISUAL SUSTANCIAL EN ELEVACION Y UN ANGULO VISUAL AZIMUTAL DE CASI 360G COMPLETOS. LA LUZ PROCEDENTE DE LA LENTE ES ENFOCADA SOBRE UN FOTODETECTOR ANULAR SUSTANCIALMENTE QUE ESTA CONECTADO A MEDIOS PARA REALIZAR UN PUNTO DE ENFOQUE SOBRE EL FOTODETECTOR CON UN EJE DE REFERENCIA.
UN METODO CON SU DISPOSITIVO CORRESPONDIENTE PARA DIRIGIR UN VEHICULO DE TRABAJO SIN VIAS Y SIN CONDUCTOR.
(16/01/1987). Solicitante/s: EATON-KENWAY, INC..
METODO Y DISPOSITIVO PARA DIRIGIR UN VEHICULO DE TRABAJO SIN VIAS Y SIN CONDUCTOR. EL METODO COMPRENDE LAS SIGUIENTES OPERACIONES: PRIMERA, SE PRODUCE UN PRIMER CAMPO MAGNETICO VARIABLE EN EL VEHICULO, LO QUE PRODUCE EN LA BOBINA DEL VEHICULO UNA PRIMERA CORRIENTE ELECTRICA; SEGUNDA, SE UTILIZA DICHO PRIMER CAMPO MAGNETICO PARA CREAR UN SEGUNDO CAMPO MAGNETICO VARIABLE EN TORNO DE UNA MARCA DE BANCO METALICO ADYACENTE AL VEHICULO; TERCERA, SE UTILIZA EL SEGUNDO CAMPO MAGNETICO PARA PRODUCIR EN LA BOBINA DEL VEHICULO UNA SEGUNDA CORRIENTE ELECTRICA; CUARTA, SE CREAN Y MIDEN UNA PLURALIDAD DE SUMAS DE VECTOR DE PRIMER Y SEGUNDO VOLTAJES, PARA DETERMINAR LA AMPLITUD MAXIMA OBSERVADA EN DICHAS SUMAS DE VECTOR; QUINTA, SE TRANSMITEN DICHAS SUMAS DE VECTOR A LOS MANDOS DEL VEHICULO; Y POR ULTIMO, SE HACE QUE EL VEHICULO SIN VIAS SEA CONDUCIDO DE CONFORMIDAD CON LOS MANDOS DE DICHO VEHICULO. DE APLICACION EN EL CONTROL DE VEHICULOS DE TRABAJO SIN CONDUCTOR.
SISTEMA DE PISTAS PASIVAS PARA LA CONDUCCION Y MANDO DE UNIDADES DE MONTAJE Y TRANSPORTE SIN CONDUCTOR.
(16/11/1986). Solicitante/s: INVENTIO AG.
SISTEMA DE PISTAS PASIVAS PARA LA CONDUCCION Y MANDO DE UNIDADES DE MONTAJE Y TRANSPORTE SIN CONDUCTOR. CONSISTE EN DISPONER, COMO LINEA DE CONDUCCION, UNA PISTA PASIVA FIJADA EN EL SUELO CON UNA CARACTERISTICA (M) DIFERENTE DEL RESTO DE LA VIA DE CONDUCCION , Y UN DISPOSITIVO PALPADOR EN EL VEHICULO PARA EL SEGUIMIENTO DE LA PISTA PASIVA , DONDE PARA UNA CONDUCCION CONTINUADA DEL VEHICULO (FZ), ESTAN CONECTADOS EN UN ORDENADOR DEL VEHICULO UN CONJUNTO DE VALORES REALES MEDIDOS POR SENSORES DE PISTA DISPUESTOS EN LA PARTE INFERIOR DEL VEHICULO, ASI COMO UN CONJUNTO DE VALORES TEORICOS ASIGNADOS A 2N POSICIONES DE PISTA. TIENE UTILIDAD EN VEHICULOS DE TRANSPORTE SOBRE EL SUELO.
SISTEMA DE GUIADO Y CONTROL PARA REALIZAR EL DESPLAZAMIENTO DE UN VEHICULO SOBRE UNA SUPERFICIE ENTRE UNA PLURALIDAD DE TERMINALES DE ESTACION.
(16/11/1986). Solicitante/s: WESTINGHOUSE ELECTRIC CORPORATION.
SISTEMA DE GUIADO Y CONTROL PARA REALIZAR EL DESPLAZAMIENTO DE UN VEHICULO SOBRE UNA SUPERFICIE, ENTRE UNA PLURALIDAD DE TERMINALES DE ESTACION. CONSTA DE AL MENOS UN VEHICULO DE TRANSPORTE QUE PUEDE DESPLAZARSE SOBRE LA SUPERFICIE; DE UN DISPOSITIVO DE BARRERA PARA DIVIDIR LA SUPERFICIE EN UNA PLURALIDAD DE ZONAS ELEMENTALES CONTIGUAS Y PARA DETECTAR EL PASO DE UN VEHICULO A TRAVES DE UN LIMITE ENTRE DOS ZONAS ELEMENTALES CONTIGUAS; DE UN DISPOSITIVO GENERADOR DE SEÑALES DE LUZ QUE EMITEN SEÑALES DE LUZ QUE IDENTIFICAN CADA ZONA OCUPADA POR UN VEHICULO E IDENTIFICAN LA DESIGNACION DEL EMPLAZAMIENTO DE CADA TERMINAL; DE UN PRIMER DISPOSITIVO RECEPTOR FOTOELECTRICO MONTADO EN EL VEHICULO PARA DETECTAR LAS SEÑALES DE LUZ PRODUCIDAS POR EL DISPOSITIVO GENERADOR DE SEÑALES DE LUZ.-.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}