CIP-2021 : G05B 19/414 : Estructura del sistema de control, p. ej. controlador común o sistema multiprocesador,
interfaz hacia el servocontrolador, controlador de interfaz programable.
CIP-2021 › G › G05 › G05B › G05B 19/00 › G05B 19/414[3] › Estructura del sistema de control, p. ej. controlador común o sistema multiprocesador, interfaz hacia el servocontrolador, controlador de interfaz programable.
G FISICA.
G05 CONTROL; REGULACION.
G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K).
G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00).
G05B 19/414 · · · Estructura del sistema de control, p. ej. controlador común o sistema multiprocesador, interfaz hacia el servocontrolador, controlador de interfaz programable.
CIP2021: Invenciones publicadas en esta sección.
Dispositivo y método para la transmisión de datos.
(10/06/2020) Dispositivo para la transmisión de datos con una interfaz de aparato de medición , una interfaz de control y una interfaz adicional , que están conectadas con una unidad de comunicación , donde
• la interfaz de aparato de medición está configurada para la recepción de paquetes de datos, que comprenden un valor de posición (P) y un valor de datos adicionales (Z),
• los paquetes de datos son suministrados a la unidad de comunicación , que comprende una unidad de procesamiento y una unidad de memoria ,
• la unidad de procesamiento está configurada para procesar el valor de posición (P), emitir el valor de posición procesado (P_OUT) a la interfaz de control y almacenar el valor de datos adicionales (Z) en la unidad de memoria ,
• la interfaz de control…
Dispositivo y método para generar una señal de disparo en un equipo de medición de posición y equipo de medición de posición para ello.
(06/05/2020) Método para generar una señal de disparo (T) asíncrona en un equipo de medición de posición , que presenta una unidad de detección de posición , una unidad de procesamiento y una unidad de interfaz , en donde el equipo de medición de posición puede conectarse, a través de la unidad de interfaz y de un canal de transmisión de datos bidireccional , con vistas a la comunicación, con un sistema electrónico de seguimiento , con las siguientes etapas:
• generar un flujo de datos sincrónico (S_DS) a partir de un flujo de datos asíncrono (A_DS), que llega procedente del sistema electrónico de seguimiento al equipo de medición de posición , mediante el muestreo del flujo de datos asíncrono (A_DS) en la rejilla temporal de una señal de ciclo de trabajo (CLK),
• generar una señal de compuerta (G)…
Sistemas y métodos para mejorar el bienestar asociado con ambientes habitables.
(04/03/2020) Un método para controlar características ambientales en un espacio cerrado; el método comprende:
- recibir en un primer momento un primer aporte indicativo de una selección de un entorno circadiano;
- en respuesta al primer aporte indicativo de la selección del entorno circadiano, proporcionar señales mediante un subsistema de control que se acopla comunicativamente para provocar que una pluralidad de fuentes de iluminación emita iluminación artificial en varios niveles y varias longitudes de onda y que se acopla comunicativamente para provocar que al menos un accionador controle al menos un nivel de iluminación natural recibida en el espacio cerrado por medio de una o más ventanas de una fuente de iluminación externa de manera que una combinación de la iluminación artificial y la natural…
Método de asignación de períodos de control independientes de ejes en el sistema de posicionamiento PLC.
(21/08/2019). Solicitante/s: LSIS Co., Ltd. Inventor/es: KIM,SEOK YEON.
Un método de asignación de períodos de control para ejes en un sistema de posicionamiento PLC , en donde el método comprende
dividir (S11) los ejes en un primer grupo de ejes que tiene un primer período de control y un segundo grupo de ejes que tiene un segundo período de control y asignar diferentes períodos de control para diferentes ejes;
caracterizado porque el método comprende además:
cuando se solicita el cálculo de control de posición del primer grupo de ejes durante el cálculo de control de posición del segundo grupo de ejes, realizar (S12) el cálculo de control de posición del primer grupo de ejes a través del cambio de tareas; y
después de completar el cálculo de control de posición del primer grupo de ejes, realizar (S13) el cálculo de control de posición del segundo grupo de ejes a través del cambio de tareas.
PDF original: ES-2752879_T3.pdf
Aparato de control numérico modular.
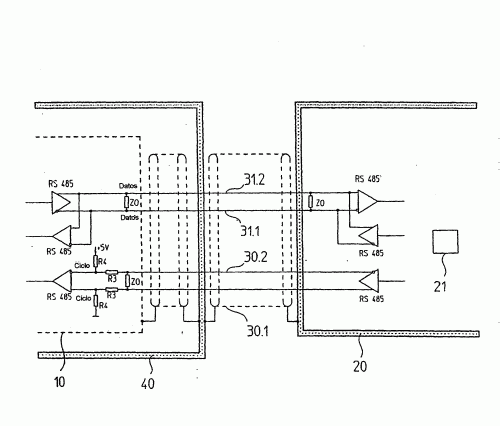
(13/05/2019) Aparato de control numérico modular, que está constituido por al menos dos módulos , que contienen, respectivamente, una unidad de microprocesador y están conectados entre sí a través de canales de transmisión de datos en serie para la transmisión de informaciones en forma de paquetes de datos y los paquetes de datos contienen el estado de al menos una señal de seguridad (SH1_IN, SH2_IN, SH1_IN', SH2_IN'), en el que
- en al menos un primer módulo está prevista una unidad de generación de paquetes de datos para la generación de paquetes de datos y para la transmisión de estos paquetes de datos hacia al menos oro módulo , y la unidad de generación de…
(23/08/2017) Control numérico para el funcionamiento de una máquina herramienta con varios ejes, con un regulador del accionamiento para cada eje a controlar, en el que los reguladores del accionamiento se pueden parametrizar a través de parámetros de la maquina (Kp, Ki, Kd, MP, Tt) y de esta manera se pueden adaptar a las más diferentes máquinas herramientas, caracterizado porque en puntos de toma en los reguladores del accionamiento se pueden seleccionar magnitudes de regulación variables (wnom, wact, Iqnom, Iqact, Unom, vnom, anom, I_int) y parámetros de la máquina (Kp, Ki, Kd, MP, Tt) y se pueden ramificar a partir del regulador del accionamiento, para ser utilizados como argumentos o parámetros de una función definida por el usuario, de manera que el valor de partida sirve para…
Sistema de control para controlar la operación de una máquina herramienta de control numérico, y dispositivos de control de extremo trasero y de extremo delantero para uso en tal sistema.
(21/06/2017) Un dispositivo de control de extremo trasero para uso en un sistema de control para controlar la operación de una máquina herramienta de control numérico que incluye el dispositivo de control de extremo trasero y un dispositivo de control de extremo delantero conectado con comunicabilidad con el dispositivo de control de extremo trasero ,
donde el dispositivo de control de extremo trasero incluye:
- un controlador numérico ,
- un controlador lógico programable ,
- un primer medio de almacenamiento para almacenar datos, incluyendo el primer medio de almacenamiento uno o varios registros PLC del controlador…
Método para la transferencia de datos entre un dispositivo de medición de posición y una unidad de procesamiento asignada y dispositivo de medición para llevarlo a cabo.
(12/04/2017) Método para la transferencia de datos entre un dispositivo de medición de posición y una unidad de procesamiento asignada en el cual datos de una primera prioridad denominados primeros datos son transmitidos en ciclos consecutivos desde el dispositivo de medición de posición a la unidad de procesamiento y en el cual en al menos en una parte de los ciclos, adicionalmente a los primeros datos, datos designados como segundos datos de una segunda prioridad más baja desde el dispositivo de medición de posición a la unidad de procesamiento , siendo variable la clase de segundos datos transmitida en un ciclo respectivo y en el cual para el inicio de un ciclo de la transmisión de datos deben ser solicitados…
Controlador numérico modular con sincronización de baja inestabilidad.
(07/09/2016) Controlador numérico modular con sincronización de baja inestabilidad, que comprende un ordenador principal y al menos una unidad de regulación , que, partiendo desde el ordenador principal , está conectados entre sí por medio de canales de transmisión de datos en serie en forma de un circuito en serie, en el que la al menos una unidad de regulación contiene:
- una primera unidad de recepción , para recibir una corriente de datos en serie que incide desde la dirección del ordenador principal ,
- una primera unidad de emisión , para emitir una corriente de datos en serie en la dirección de una unidad de regulación final del circuito en serie,
- una segunda unidad de recepción para recibir una segunda corriente de datos en serie que incide desde la dirección…
Conjunto para el diagnóstico de un dispositivo con piezas móviles.
(29/06/2016) Conjunto para el diagnóstico de un dispositivo con piezas móviles que comprende un equipo de tratamiento de datos con un ordenador y al menos un dispositivo , especialmente un robot industrial, con un sistema de control , presentando el dispositivo piezas móviles que se fijan de forma articulada en puntos de sujeción de un cuerpo base fijo o en otras piezas móviles , previéndose al menos un sistema de sensores de transmisión inalámbrica que se fija en el respectivo punto de sujeción o en la propia pieza móvil y que registra los datos físicos de la respectiva pieza móvil y los transmite…
Dispositivo para la manipulación de señales de interfaces.
(20/04/2016) Dispositivo para la manipulación de señales de interfaces, que presenta
• una interfaz subordinada , que se puede conectar en una interfaz maestra de un aparato de control ,
• una interfaz maestra , que se puede conectar en una interfaz subordinada de un aparato de control ,
• una disposición de circuito , a la que se alimenta por cada interfaz al menos una señal de entrada de datos (DIN_S, DIN_M), y que emite por cada señal de entrada de datos (DIN_S, DIN_M) hacia la otra interfaz respectiva una señal de salida de datos (DOUT_M, DOUT_S) correspondiente, caracterizado porque
la disposición de circuito comprende
a) al menos una unidad de modulación , a la que se alimentan una señal de entrada de datos (DIN_S, DIN_M), y una señal de datos de sustitución (DE_S, DE_M), y que emite una señal de salida de datos…
Sistema de control de máquinas para una máquina que ejecuta acciones peligrosas, como una prensa con, al menos, un circuito de desconexión.
(24/04/2013) Sistema de control de máquinas (MS) para una máquina que ejecuta acciones peligrosas, como una prensa con,al menos, un circuito de desconexión (ABSCH) para la desconexión de, al menos, una salida (AA, AB) del sistemade control de máquinas (MS), debido a una variación del estado en, al menos, una entrada (EA, EB) de dichosistema, en donde el circuito de desconexión (ABSCH) presenta, al menos, para órdenes de control de tiempocrítico, un circuito lógico (LSA, LSB) independiente de un tiempo de ciclo del sistema de control de máquinas (MS),caracterizado porque el, al menos un, circuito de desconexión (ABSCH) presenta un circuito de prueba (TSA,TSB), con el cual se puede controlar la entrada (EA, EB) del circuito de desconexión (ABSCH) definida en"ABIERTO", porque se…
Dispositivo para controlar una máquina así como sistema de telecomunicaciones.
(12/03/2013) Dispositivo para controlar una máquina herramienta con un control de máquina en forma de un ordenador de control, en el que se opera un software de gestión de máquina, caracterizado,
porque el control de máquina presenta un primer ordenador (10a) virtual y un segundo ordenador (10b) virtual,porque el primer ordenador (10a) virtual se opera con un primer sistema operativo y el segundo ordenador (10b)virtual con un segundo sistema operativo,
porque en el primer ordenador virtual (10a) está instalada una conexión a Internet, y
porque en el segundo ordenador (10b) virtual está instalado un software de gestión de máquina.
CENTRO DE MECANIZADO CNC PARA PERFILERIA, Y PROCEDIMIENTO DE OPERACION DE DICHO CENTRO DE MECANIZADO.
(11/02/2013) Centro de mecanizado CNC para perfilería, y procedimiento de operación de dicho centro de mecanizado.
Permite manipular automáticamente marcos de perfilería sobre los cuales se realizan operaciones de mecanizado de una forma sencilla, al alcance de personas no expertas en programación de máquinas de control numérico, destacando fundamentalmente por comprender una interfaz que permite al usuario introducir datos generales de la operación y objeto a mecanizar; un medio de procesamiento conectado a dicha interfaz , que determina las trayectorias y velocidades de la herramienta de corte ; un controlador CNC que controla los medios de accionamiento de la herramienta de corte para…
Procedimiento para la puesta en servicio de controles numéricos para máquinas herramientas o máquinas de producción.
(21/11/2012) Procedimiento para la puesta en servicio de un control numérico para máquinas herramientas o máquinas deproducción, en el que el control numérico está constituido por un ordenador principal y al menos un aparatosiguiente , que están conectados entre sí a través de una red de transmisión de datos y el al menos unaparato siguiente puede ser direccional por el ordenador principal a través de una dirección lógica (LA), a laque está asociada una dirección de hardware (HA) con informaciones sobre el direccionamiento físico del al menosun aparato siguiente a través de la red de transmisión de datos , caracterizado porque el ordenador principal solicita en un modo de conexión secuencialmente…
DISPOSITIVO DE CONTROL Y MÉTODO DE CONTROL DE SERVOSISTEMA.
(12/07/2011) Un dispositivo de control de servosistema, incluyendo: una seccion de introduccion de datos que introduce datos necesarios a partir de los detalles de especificaciones de una maquina y motor; una seccion de edicion de datos que edita datos de excentrica electronica; una seccion de presentacion de datos a la que se envian los resultados editados convertidos a la forma de una tabla o grafico; y una seccion de conversion de datos de excentrica que puede convertir los resultados editados enviados a la seccion de conversion de datos de excentrica en una forma que permite movimientos de excentrica, caracterizado por incluir ademas: unos medios de calculo de datos introducidos para calcular al menos uno del par maximo de aceleracion/deceleracion,…
DISPOSITIVO DE REGULACION PARA UN ROBOT MULTIAXIAL.
(16/05/2007). Solicitante/s: DURR SYSTEMS GMBH. Inventor/es: MEISSNER, ALEXANDER, DR., WILDERMUTH, DIETMAR, DR.
Dispositivo de regulación para un robot multiaxial, en particular para un robot de barnizado de una instalación de barnizado, con varios reguladores para la regulación de accionamiento en cada caso de un eje del robot, estando acoplados por lo menos dos reguladores de ejes diferentes entre sí solapando los ejes, caracterizado porque el acoplamiento solapando los ejes entre los reguladores se refiere a una desviación de regulación (?M) de un regulador , en la medida en que registra la desviación de regulación (?M) de uno de los reguladores y es retroacoplada en uno o varios reguladores distintos referidos al eje.
PROCEDIMIENTO PARA EL FUNCIONAMIENTO DE UN DISPOSITIVO PARA MEDIR LA POSICION.
(01/09/2006). Ver ilustración. Solicitante/s: DR. JOHANNES HEIDENHAIN GMBH. Inventor/es: HOFBAUER, HERMANN, HUBER, HELMUT, STRASSER, ERICH, BIELSKI, STEFFEN.
Procedimiento para el funcionamiento de un dispositivo para medir la posición , a continuación del cual hay una unidad de evaluación para el ulterior tratamiento de los datos de posición, donde tiene lugar la determinación del tiempo del desplazamiento de la señal (tD) entre el dispositivo para medir la posición y la unidad de evaluación , antes del régimen de medición, para lo cual -se solicita del dispositivo para medir la posición la transmisión serial de datos por una línea de datos en sentido hacia la unidad de evaluación , -en un momento inicial definido (t31 t35) se pone en marcha por el lado de la unidad de evaluación un contador , que cuenta en aumento con una frecuencia de recuento predeterminada (fz), -se determina el estado actual del contador (Z) en un momento (t50), en cuanto se detectan por el lado de la unidad de evaluación los datos entrantes, -a partir del estado del contador determinado (Z) se determina el tiempo de desplazamiento de la señal (tD, i).
DISPOSITIVO DE CONTROL DE ACCIONAMIENTO Y METODO PARA CONTROLAR UN MECANISMO DE ACCIONAMIENTO Y MEDIO DE ALMACENAMIENTO DE DATOS QUE REALIZA UN PROGRAMA DE ORDENADOR.
(16/07/2005). Ver ilustración. Solicitante/s: SEIKO EPSON CORPORATION. Inventor/es: KAWASE, YUJI.
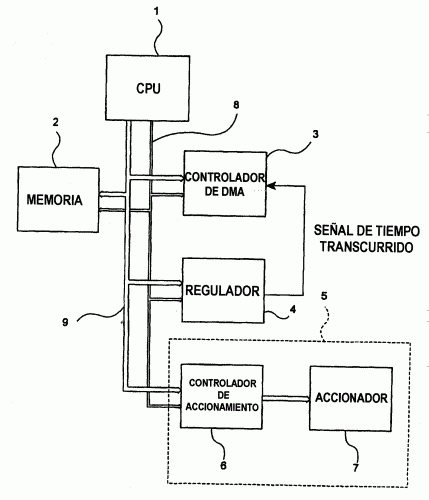
Un dispositivo de control de accionamiento para controlar un mecanismo de accionamiento que incluye medios de control de accionamiento y medios (7; 7;7, 74) de accionamiento controlados por los medios 6 de control de accionamiento, que comprende: medios de generación de datos para generar conjuntos de datos plurales que incluyen cada uno datos de control para controlar los medios (7; 7; 7, 74) y datos de regulación asociados para controlar el momento en el que los datos de control son enviados a los medios de control de accionamiento, y para aplicar una primera señal de inicio para iniciar la transmisión de datos a los medios de control de accionamiento; medios de almacenamiento para almacenar los datos de regulación y los datos de control; medios de regulador para iniciar una operación de regulación cuando se reciben datos de regulación y para enviar una señal de tiempo transcurrido cuando un periodo de tiempo especificado por los datos de regulación transcurre.
CONTROL DE MOVIMIENTO UNIVERSAL.
(16/11/2004) Control de movimiento universal, que combina funcionalmente en sí las tareas clásicas de un control programable con memoria y un control numérico, caracterizado porque está formado un modelo unitario de planos de ejecución, que presenta varios planos de ejecución de diferente tipo con diferente prioridad, estando previstos los siguientes planos de ejecución desde la máxima hasta la mínima prioridad: a) un plano de regulación de la posición, que está constituido por el plano del sistema y el plano del usuario sincronizados correspondientes, b) un plano de interpolación, que está constituido por el plano del sistema y el plano del usuario sincronizados correspondientes, c) un plano del sistema de eventos para acontecimientos…
CONTROL UNIVERSAL DEL MOVIMIENTO.
(01/09/2004) Control universal del movimiento con sistema de ingeniería para la creación de programas de usuario y un sistema de tiempo de ejecución que reúne, de forma funcional, las tareas clásicas de un control de memoria programable y un control numérico, caracterizado porque se forma un modelo unificado de niveles de ejecución de tal manera que presenta varios niveles de ejecución de distinto tipo con diferente prioridad, con lo que están previstos diferentes niveles de usuario y diferentes niveles de sistema de mayor a menor prioridad, y porque en cada caso pueden cargarse paquetes (TP) tecnológicos por parte del usuario en…
DISPOSITIVO REGULADOR PARA UN SOLDADOR.
(16/05/2004) Soldador formado por un dispositivo de control digital, en especial de un control de microprocesador y de una unidad de regulación del proceso de soldadura que está formada por una unidad de procesado de señales, en lo sucesivo denominada unidad SP, y de un modulador de duración de impulsos, en lo sucesivo denominado PWM, así como de un componente externo, como por ejemplo una etapa de potencia o un dispositivo de entrada o salida, etc., en el que el intercambio de datos se produce en formato digital, fundamentalmente con señales digitales, con un componente interno y/o externo, caracterizado porque la regulación del proceso de soldadura de la unidad de regulación del proceso de soldadura se produce de forma digital y porque la configuración y parametrización de la unidad de regulación del proceso de soldadura tiene…
CONTROL DE MOVIMIENTO UNIVERSAL.
(01/05/2004) Control de movimiento universal con sistema técnico y sistema de tiempo de ejecución, que combina en sí funcionalmente los cometidos clásicos de un control programable con memoria y de un control numérico, caracterizado porque un modelo unitario de planos de ejecución (AE) está configurado de tal forma que presenta varios planos de ejecución de diferente tipo con diferente prioridad, estando previstos planos de usuario y planos del sistema de diferente prioridad desde prioridad máxima a prioridad mínima y porque se pueden cargar, respectivamente, paquetes de tecnología (TP) por parte del usuario en el sistema técnico y/o sistema de tiempo de ejecución (ES1-ES4, RTS1-RTS4), porque una fuente de datos (D) para informaciones de…
APARATO DE AUTOMATIZACION Y PROCEDIMIENTO DE ACTUALIZACION.
(16/04/2004). Ver ilustración. Solicitante/s: SIEMENS AG. Inventor/es: BARTHEL, HERBERT, LAFORSCH, JURGEN, LUBER, RALPH, RITZER, JOSEF.
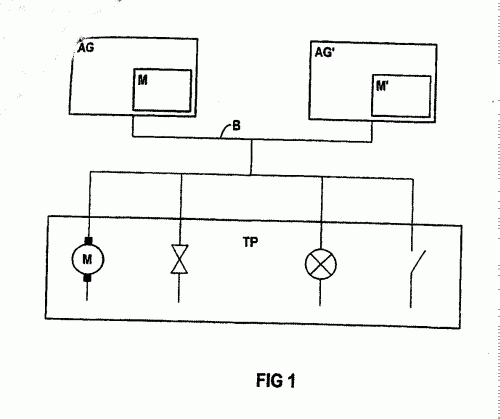
Aparato de automatización (AG) para el control y/o supervisión de un proceso técnico (TP), - con una memoria (M) para la memorización de al menos un programa de usuario (Ti) con al menos una tarea (T1, T2) así como con datos relacionados con el proceso y con el programa de usuario, - donde en el caso de acoplamiento de un aparato de automatización (AG) redundante, se lleva a cabo una transferencia del contenido de la memoria (M) a una memoria (M) del aparato de automatización redundante (AG), caracterizado - porque a cada tarea (T1, T2) para la transferencia del contenido de una parte (M1, M2) de la memoria (M), a la que accede la tarea (T1, T2) respectiva, está asociada una tarea de actualización (T1A, T2A), y - porque se lleva a cabo una terminación de la tarea de actualización (T1A, T2A) cuando el tiempo de ejecución de la tarea (T1, T2) y de la tarea de actualización (T1A, T2A) excede un límite superior predeterminado o predeterminable del tiempo de ejecución (t1l, t2l).
EJES INTELIGENTES Y PROCEDIMIENTO CORRESPONDIENTE.
(16/04/2003). Solicitante/s: STICHT, WALTER. Inventor/es: STICHT, WALTER.
La invención se refiere a una unidad de desplazamiento , destinada por ejemplo a sistemas de puesta a disposición, de manipulación, de guiado o de control para piezas de montaje . Esta unidad comprende elementos constitutivos ue pueden desplazarse uno respecto de otro, mediante una unidad de arrastre , al menos un dispositivo de guiado para al menos uno de los elementos constitutivos y una unidad de control . Al menos un elemento de la unidad de control , que trata una información lógica o una información de bus se integra en la unidad de arrastre y/o en al menos uno de los elementos constitutivos y/o montado sobre uno de los elementos constitutivos.
SISTEMA INTERACTIVO ENTRE UNA MAQUINA-HERRAMIENTA Y UN OPERARIO.
(01/10/2001) Sistema interactivo entre una máquina-herramienta y un operario de la máquina-herramienta que comprende un controlador. El controlador comprende una unidad central de proceso (CPU) y un panel de control conectado con la unidad central de proceso (CPU). El sistema interactivo comprende una unidad dos almacenamiento conectada con la unidad central de proceso (CPU) y compuesta por una zona de datos de libre acceso y una zona de datos de programa , un editor de trayectoria de perfil dispuesto en la unidad central de proceso (CPU) y conectado con la unidad de almacenamiento para convertir una coordenada del perfil de pieza en una gráfica de trayectoria real de perfil de la pieza y en un programa de trayectoria, y una unidad de interconexión gráfica conectada con la unidad…
PROCEDIMIENTO Y EQUIPO PARA LA TRANSMISION PERIODICA DE DATOS CON FUNCION DE PREVISION PARA INTERCAMBIO DE DATOS INDEPENDIENTE ENTRE UNIDADES EXTERNAS.
(01/07/1997). Solicitante/s: SIEMENS AG. Inventor/es: BRUNE, RICHARD, DIPL. ING., SMYK, MICHAEL, DIPL. ING., SCHUMACHER, JURGEN, DIPL. ING., ROCHHOLZ, GUNTHER, DIPL. ING.
LA INVENCION SE REFIERE A UN PROCEDIMIENTO Y A UN EQUIPO PARA TRANSMISION CICLICA DE DATOS DE UNIDADES (SE,E) EXTERNAS A TRAVES DE UN BUS (PB) DE PERIFERIA PARA PROCESADO EN UN SISTEMA DE ORDENADOR CON UN BUS (SB) DE SISTEMA MAS RAPIDO, ASI COMO ENTRE UNIDADES (SE,E) EXTERNAS UNA CON OTRA. UN CONTROL (AS) DE DESARROLLO INTRODUCE LOS DATOS EN UNIDADES (SE,E) EXTERNAS CON REFERENCIA POSTERIOR A TRAVES DEL BUS (PB) PERIFERICO EN LA APLICACION RAM (DPR) DUAL-PORT, A PARTIR DE LA CUAL SE LEE EN UN PROCESADOR DEL SISTEMA DE ORDENADOR POR MEDIO DEL BUS (SB) DE SISTEMA MAS RAPIDO. LOS DATOS DE LA UNIDAD (SE,E) EXTERNA LEIDA PUEDEN SE TRANSMITIDOS A TRAVES DE UNA "FUNCION BROADCAST" AUTONOMA EN LAS UNIDADES (E) EXTERNAS RESTANTES DE FORMA DIRECTA A TRAVES DEL BUS (PB) PERIFERICO. EL ACCESO DIRECTO AL PROCESADOR (P) PERMANECE ADEMAS POSIBLE A TRAVES DEL BUS (PB) PERIFERICO.
CIRCUITO ELECTRONICO DETECTOR DE CORRIENTES EN MULTIPLES ENTRADAS.
(16/12/1996) CIRCUITO ELECTRONICO DETECTOR DE CORRIENTES EN MULTIPLES ENTRADAS. ES DE ESPECIAL APLICACION EN CONTROLADORES REALIZADOS CON MICROPROCESADORES PARA DETECCION DE ALARMAS O PARA OBSERVACION DE SEÑALES DE ENTRADA; PARA LO QUE PRESENTA ESTRUCTURA DE PUERTO DE ENTRADA. ESTA CONSTITUIDO POR UNA PLURALIDAD DE MODULOS QUE CUENTAN CON UN MODULO DE DETECCION DE VALOR ABSOLUTO DE LA CORRIENTE QUE ESTA CONECTADO A UN MODULO COMPARADOR DE UN NIVEL MINIMO QUE DETERMINA SI ALGUNA DE LAS ENTRADAS ESTA DESCONECTADA O AL AIRE; A UN MODULO COMPARADOR DE SOBRECORRIENTE Y A UN MODULO COMPARADOR Y DE ALMACENAMIENTO . LOS MODULOS (4, 5 Y 6) ESTAN CONECTADOS A UN CIRCUITO DE TENSION DE REFERENCIA QUE ESTABLECE LAS TENSIONES DE COMPARACION EN CADA…
{kind=link}
{kind=link}
{kind=link}