CIP-2021 : G05D 1/12 : Control para la búsqueda de un objetivo.
CIP-2021 › G › G05 › G05D › G05D 1/00 › G05D 1/12[1] › Control para la búsqueda de un objetivo.
G FISICA.
G05 CONTROL; REGULACION.
G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F).
G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
G05D 1/12 · Control para la búsqueda de un objetivo.
CIP2021: Invenciones publicadas en esta sección.
Sistema de tratamiento de objetivos que comprende un dispositivo de señalización de objetivos.
(12/02/2020) Sistema de tratamiento de objetivos, comprendiendo el citado sistema:
- al menos un dispositivo de señalización de objetivos comprendiendo el citado dispositivo al menos:
· una unidad volante de tamaño reducido, estando configurada la citada unidad volante para volar a baja altura y para ser guiada con la ayuda de órdenes de guiado, estando provista la citada unidad volante de al menos un sensor apto para medir al menos un parámetro del entorno,
· una unidad de transmisión de datos ; y
· al menos un emisor apto para emitir una información de posición; y
- al menos una…
Procedimiento y sistema para el guiado, en la fase terminal, de un misil interceptor hacia un objetivo aéreo móvil.
(11/12/2019) Procedimiento para el guiado, en la fase terminal de un misil interceptor hacia un objetivo aéreo, incluyendo dicho misil interceptor:
· instrumentos de abordo (IB) configurados para entregar informaciones sobre la dinámica actual de dicho misil interceptor;
· órganos de pilotaje (OP) de dicho misil interceptor;
· un sensor de guiado terminal (AD) configurado para entregar secuencialmente las medidas cartométricas de dicho objetivo;
· un sistema de reconstrucción (Ref) configurado para reconstruir, a partir de dichas medidas cartométricas y en un sistema de coordenadas de referencia fijo, al menos las medidas de un ángulo de situación y de un ángulo de demora que definen la dirección de dicho objetivo con respecto a ducho misil interceptor; y
· una pluralidad de estimadores…
DISPOSITIVO PARA EL CONTROL INTEGRAL DE RUIDO Y MOVILIDAD CON MONITORIZACION.
(29/11/2019) 1. Dispositivo para el control integral de ruido y movilidad con monitorización caracterizado por comprender en combinación:
- Una cámara de visión artificial que capta la imagen de los vehículos que transitan, la cual incorpora un programa para diferenciar los vehículos, transformando en datos digitales que a través de su comunicador , los transmite a la memoria , y ésta los almacena.
- Una unidad sensórica que, a través de su micrófono , capta los ruidos emitidos por los vehículos que transitan, transformando dicha señal en datos digitales que, a través de su comunicador , los transmite a la memoria , y ésta los almacena.
- Una Base informática que, en comunicación con la memoria y disponiendo ésta de su propio programa informático , trata los datos proporcionados por la cámara de visión artificial y la unidad sensórica…
Dispositivo de carga de robot limpiador y método para ensamblar un robot limpiador al dispositivo de carga.
(20/11/2019) Un dispositivo de carga de un robot limpiador, comprendiendo el dispositivo de carga:
un cuerpo principal que comprende una unidad de terminal 5 configurada para cargar el robot limpiador,
definiendo el cuerpo principal un aspecto exterior;
una unidad generadora de señal de inducción dispuesta en un lado del cuerpo principal y dispuesto para transmitir una señal de inducción de retorno al robot limpiador; y un miembro de guía de señal de inducción dispuesto en un lado de la unidad generadora de señal de inducción y dispuesto para incrementar el rendimiento de ensamblaje del robot limpiador mejorando la linealidad de la señal…
Dispositivo para la asignación óptica de objetivo y la dirección de un misil.
(11/09/2019) Misil para transportar una carga útil, que comprende
un sensor óptico para detectar y conducir hacia un objeto objetivo;
una unidad de propulsión de vuelo para influir en una trayectoria del misil; y
una unidad de cálculo para el procesamiento de imágenes y el control de vuelo del misil;
en el que el sensor óptico es inmóvil con respecto al misil; en el que el sensor óptico está configurado para formar una imagen de sensor (FoR) con un número definido de elementos de imagen ;
en el que al menos solo se lee una subregión (FoV) de la imagen de sensor (FoR); y en el que la subregión (FoV) de la imagen de sensor es variable o ajustable en la imagen de sensor, caracterizado porque el misil está configurado para ser evaluar o interconectar conjuntamente una pluralidad…
Método de control de tiro para defensa antiaérea basada en armas de fuego.
(27/03/2019). Solicitante/s: BAE SYSTEMS BOFORS AB. Inventor/es: WÄLBERG,KJELL.
Método de control de tiro de armas contra blancos aéreos cuando se dirigen hacia un objeto de protección, en el que se conoce la posición del objeto de protección, que comprende las siguientes etapas de método:
medir la posición del blanco aéreo,
estimar la posición del blanco aéreo,
estimar la velocidad del blanco aéreo,
caracterizado por las etapas adicionales de:
aplicar un modelo de la ley de guiado de blanco aéreo,
calcular las aceleraciones que debe aplicar el blanco aéreo con el fin de acertar en el objeto de protección,
predecir la trayectoria futura del blanco aéreo basándose en la posición del objeto de protección, la posición estimada del blanco aéreo, la velocidad estimada del blanco aéreo, la aceleración calculada del blanco aéreo,
calcular puntos de mira a lo largo de la trayectoria predicha, y
dirigir las armas hacia los puntos de mira.
PDF original: ES-2724325_T3.pdf
Procedimiento que permite asegurar la navegación y/o el guiado y/o el pilotaje de un proyectil hacia un objetivo y dispositivo que pone en funcionamiento tal procedimiento.
(30/05/2018) Procedimiento que permite asegurar la navegación y/o el guiado y/o el pilotaje de un proyectil hacia un objetivo (B), procedimiento en el cual se utiliza un cálculo de todos o parte de los ángulos de Euler (ψ ,θ,Φ ) del proyectil para permitir la determinación de la actitud y/o la localización del proyectil en un punto de referencia terrestre, procedimiento caracterizado por el hecho de que:
se introduce previamente al tiro en una memoria o registro de un calculador del proyectil al menos un valor de las tres componentes (HMB0x,HMB0y,HMB0z) de un campo magnético de referencia en un punto de…
DISPOSITIVO DE DETECCIÓN E INTERCEPCIÓN DE AERONAVES NO TRIPULADAS (DRONES).
(19/10/2017). Solicitante/s: CAÑETE AGUADO, Jose Miguel. Inventor/es: CAÑETE AGUADO,Jose Miguel.
Dispositivo de detección e interdicción de drones, todo en un sistema. Presenta un radar pasivo de vigilancia y detección, un sistema de comunicaciones y sincronización, un sistema de carga de los drones de interdicción, una o varias aeronaves no tripuladas de vuelo autónomo encargadas de la intercepción del objetivo con sensores de seguimiento, sistemas de navegación y comunicación, sistema embarcado de interferencias de radio en los sistemas de navegación o control de la nave intrusa, y, en caso de no ser efectivo este método, proceder a su intercepción por medios físicos mediante lanzamiento de red.
Procedimiento y dispositivo para mejorar la navegación inercial de un artefacto.
(28/06/2017). Solicitante/s: MBDA FRANCE. Inventor/es: LARCHER, ERIC, GUIBOUT,VINCENT, DE ARAUJO,BRUNO.
Procedimiento para mejorar la navegación inercial de un artefacto (M) equipado con una central inercial (IM) de calidad mediocre y disparado desde un portador (L) equipado con una central inercial (IL) de precisión,
procedimiento en el que:
- antes del disparo de dicho artefacto (M) desde el portador (L), las desviaciones medias de los acelerómetros y de los girómetros de la central inercial (IM) de dicho artefacto se determinan con ayuda de la central inercial (IL) de dicho portador (L);
caracterizado por que
- durante la navegación inercial de dicho artefacto (M), después del disparo, las mediciones acelerométricas y girométricas suministradas por dicha central inercial (IM) de dicho artefacto (M) son corregidas por dichas desviaciones medias determinadas antes del disparo.
PDF original: ES-2634873_T3.pdf
(29/03/2017). Solicitante/s: VIDAL ROJAS, Pablo. Inventor/es: VIDAL ROJAS,Pablo.
Maleta autónoma.
Maleta autopropulsada, que comprende medios de propulsión, medios de dirección, medios de detección, medios de posicionamiento, medios de comunicación y medios de procesamiento, en donde los medios de procesamiento están configurados para determinar una posición de referencia por medio de uno o más medios de detección actuando por separado o de forma combinada, a partir de la posición de un dispositivo de comunicación remoto y/o de la posición de un elemento particular del entorno, y para controlar a los medios de propulsión y a los medios de dirección para que la maleta se desplace por sí misma hacia la posición de referencia, modificando su trayectoria y/o velocidad para evitar el impacto con elementos del entorno y continuando posteriormente su desplazamiento hacia la posición de referencia.
PDF original: ES-2607223_B1.pdf
PDF original: ES-2607223_A1.pdf
Procedimiento y sistema de dirección de un vehículo aéreo no tripulado.
(26/10/2016). Ver ilustración. Solicitante/s: UMS Skeldar Sweden AB. Inventor/es: MOLANDER,SÖREN, SÖDERMAN,JOHAN, WALDO,MATTIAS.
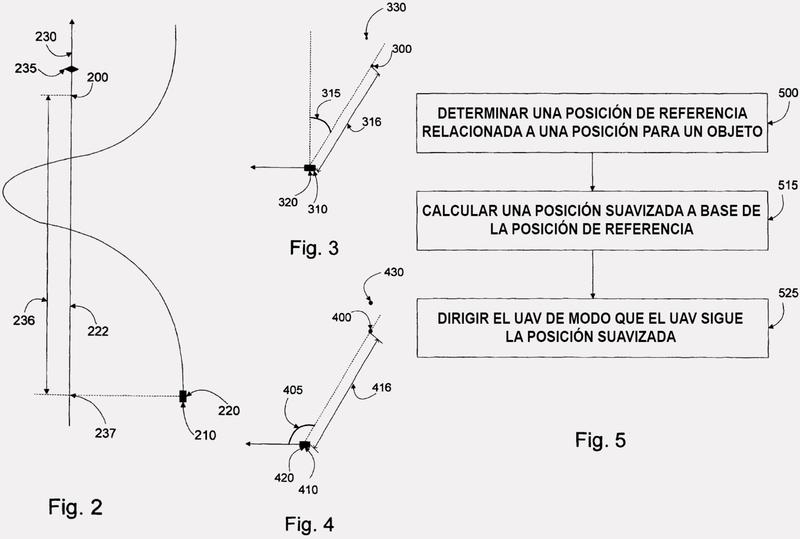
Un procedimiento de dirección de un UAV, Vehículo Aéreo No Tripulado, para habilitar un comando de alto nivel de dicho UAV, el procedimiento comprende las etapas de:
- determinar una posición de referencia relacionada con una posición para un objeto que dicho UAV debería seguir; estando el procedimiento caracterizado por:
- calcular una posición suavizada en base a en dicha posición de referencia, en el que el cálculo implica regular dicha posición suavizada a dicha posición de referencia, de modo que dicha posición suavizada tiene una frecuencia de movimiento más baja que dicha posición de referencia; y
- dirigir dicho UAV de modo que dicho UAV sigue la posición suavizada.
PDF original: ES-2612163_T3.pdf
Dispositivo de carga de robot limpiador.
(10/03/2016) Un dispositivo de carga de un robot limpiador, comprendiendo el dispositivo de carga:
un cuerpo principal que comprende una unidad de terminal configurada para cargar el robot limpiador, definiendo el cuerpo principal un aspecto exterior;
una unidad generadora de señal de inducción dispuesta en un lado del cuerpo principal para transmitir una señal de inducción de retorno al robot limpiador; y un miembro de guía de señal de inducción dispuesto en un lado de la unidad generadora de señal de inducción para incrementar el rendimiento de ensamblaje del robot limpiador mejorando la linealidad de la señal de inducción,
en que la unidad generadora de señal de inducción comprende al menos un par de sensores de inducción de…
Método y aparato de guía.
(06/01/2016) Un método de guía de un perseguidor hacia un objetivo, comprendiendo el método:
(a) proporcionar una pluralidad de trayectorias de objetivos posibles, ponderadas para representar una distribución de probabilidades de las trayectorias de los objetivos;
(b) proporcionar una pluralidad de controles de guía candidatos, parametrizados por un parámetro de guía candidato;
(c) para cada uno de una pluralidad de valores de los parámetros de guía candidatos:
a. determinar una trayectoria proyectada del perseguidor, que resulta del control de guía candidato que corresponde al valor del parámetro de guía candidato;
…
Procedimiento y sistema de estimación de una trayectoria de un móvil.
(22/02/2013) Procedimiento de estimación de una trayectoria de un móvil en un entorno real de navegación que comprende,la facilitación (E20), por una herramienta de simulación numérica (M2) que modela el móvil en este entorno, mandoscinemáticos (C11, C12) a un simulador de movimientos que embarca el móvil y a un blanco representativo deun objetivo que hay que alcanzar por el móvil, siendo alimentada (E 10) la citada herramienta de simulación pormandos de gobierno (P) facilitados por un calculador del citado móvil y facilitando, en respuesta a estos mandosde gobierno, puntos (X) de la trayectoria, comprendiendo el citado procedimiento de estimación,…
PROCEDIMIENTO Y DISPOSITIVO DE GUIADO DE UN APARATO VOLADOR, EN PARTICULAR UN MISIL, HACIA UN BLANCO.
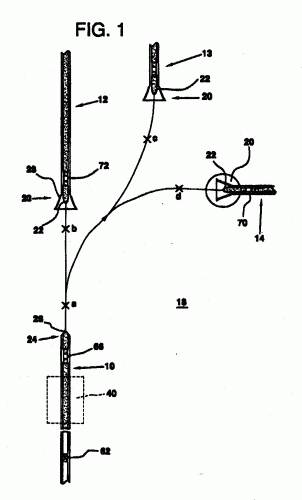
(16/05/2004) Un procedimiento de guía de misiles, en su etapa terminal, utiliza un detector de objetivos que se controla para centrarse en uno o dos campos de direcciones o objetivos proyectados. El procedimiento para guiar un misil (M) sobre un objetivo (C) tiene diferentes etapas sucesivas y una etapa terminal. En la etapa terminal la guía es realizada por las mediciones de un sensor (D) montado sobre el misil (M) y apuntado con su línea de visión sobre el objetivo (C) de manera que una proyección (Cp) del objetivo se sitúe en el campo de medición (CM) del sensor (D). El procedimiento para guiar un misil (M) sobre un objetivo (C) tiene diferentes etapas sucesivas y una etapa terminal. En la etapa terminal la guía se realiza mediante las mediciones del sensor (D) montado en el misil (M) y que apunta con su línea de visión sobre el objetivo…
SISTEMA DE GUIADO PARA UN VEHICULO GUIADO DE FORMA AUTOMATICA.
(01/12/2002). Ver ilustración. Solicitante/s: JERVIS B. WEBB INTERNATIONAL COMPANY. Inventor/es: ALOFS, CORNELL W., DRENTH, RONALD R.
SE DESCRIBE UN SISTEMA DE GUIA PARA GUIAR UN VEHICULO GUIADO AUTOMATICAMENTE A LO LARGO DE UNA TRAYECTORIA, QUE INCLUYE RAILES PARA SUSTENTAR EL AGV A LAS PARTES GENERALMENTE RECTAS DEL RECORRIDO Y UN SISTEMA DE GUIA SIN RAILES PARA DIRIGIR EL AGV DESDE EL EXTREMO DE UN PRIMER SEGMENTO DE RAIL AL COMIENZO DE OTRO. LOS RAILES PROPORCIONAN EL NECESARIO NIVEL DE CONTROL PARA PERMITIR QUE UN VEHICULO AUTOMATICO SE DESPLACE A ALTAS VELOCIDADES, EN TANTO QUE EL SISTEMA DE GUIA SIN RAILES ELIMINA LA NECESIDAD DE UTILIZAR CAMBIOS DE RAIL QUE SERIAN NECESARIOS EN CASO CONTRARIO PARA DESPLAZAR UN VEHICULO GUIADO EN UN RAIL DE UNA PARTE DE RAIL A OTRA.
DISPOSITIVO DE GUIADO DE UN MISIL.
(16/06/2002). Ver ilustración. Solicitante/s: AEROSPATIALE SOCIETE NATIONALE INDUSTRIELLE. Inventor/es: NACCACHE, FREDERIC, PANOT, CHRISTIAN.
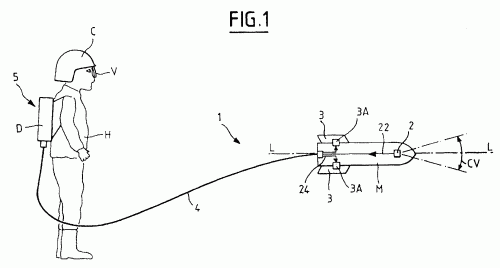
LA PRESENTE INVENCION SE REFIERE A UN DISPOSITIVO DE GUIADO DE UN MISIL (M) QUE LLEVA EN PARTICULAR UN DETECTOR DE IMAGENES QUE GENERA IMAGENES DEL PAISAJE EN LA PARTE DELANTERA DEL MISIL (M), Y UNA UNIDAD DE CONTROL SITUADA EN EL SUELO,QUE DETERMINA ORDENES DE CONTROL DEL MISIL (M), A PARTIR DE IMAGENES DEL PAISAJE GENERADAS POR EL DETECTOR DE IMAGENES Y TRANSMITIDAS POR MEDIOS DE TRANSMISION . SEGUN LA INVENCION, LA UNIDAD DE CONTROL LLEVA UN SISTEMA QUE PROYECTA DELANTE DE, LOS OJOS DE UN OPERADOR (H) DICHAS IMAGENES, UN SISTEMA QUE DETERMINA LA PARTE DE IMAGENES MIRADA POR EL OPERADOR (H) Y QUE CORRESPONDE A LA PARTE DEL PAISAJE HACIA LA CUAL DESEA QUE EL MISIL (M) SEA GUIADO, Y UN SISTEMA QUE DETERMINA ORDENES PARA CONTROLAR EL MISIL HACIA LA PARTE DEL PAISAJE ASI MIRADA.
SISTEMA DE GUIADO EN ALINEACION DE UN MISIL SOBRE UN BLANCO.
(16/10/2001). Solicitante/s: AEROSPATIALE SOCIETE NATIONALE INDUSTRIELLE. Inventor/es: DUPONT, STEPHANE.
LA PRESENTE INVENCION SE REFIERE A UN SISTEMA DE GUIA EN ALINEAMIENTO DE UN MISIL SOBRE UN BLANCO MOVIL. SEGUN LA INVENCION, EL CALCULADOR DE GUIA DEL SISTEMA COMPRENDE: PRIMEROS MEDIOS PARA ESTIMAR EL ESTADO DEL MISIL Y LOS MOVIMIENTOS DE UN BLANCO A PARTIR DE LA MEDICION DE LA POSICION DEL MISIL, RESPECTO DE UN EJE DE REFERENCIA, POR MEDIOS DE MEDICION DE LA DESVIACION, UTILIZANDO UN MODELO DEL COMPORTAMIENTO DINAMICO DEL MISIL, ASI COMO UN MODELO CINEMATICO DE UN BLANCO; - SEGUNDOS MEDIOS 814), DESTINADOS A ELABORAR ORDENES DE SEGUIMIENTO Y DE REFERENCIAS PARA EL CONTROL DEL MISIL, CONECTADOS A DICHOS PRIMEROS MEDIOS , - TERCEROS MEDIOS PARA ELABORAR EL ORDEN DE CONTROL APLICADO AL MISIL, CONECTADOS A DICHOS PRIMEROS Y SEGUNDOS MEDIOS.
SISTEMA DE VIGILANCIA Y RECONOCIMIENTO AEREO PARA LA PREVENCION DE INCENDIOS.
(01/05/2000). Ver ilustración. Solicitante/s: RAPI RECONOCIMIENTO AEREO PARA LA PREVENCION DE INCENDIOS, S.L. Inventor/es: SIERRA PEREZ, MANUEL, GUERRERO PADRON,JUAN JOSE, MARTINEZ-VAL PEÑALOSA,RODRIGO, MARTINEZ FALERO,EUGENIO, LAZARO GASCO,JUAN MANUEL.
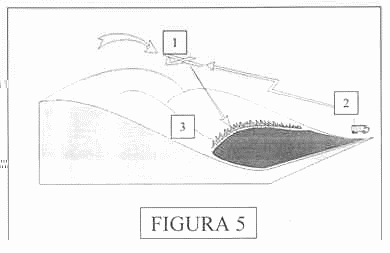
El sistema de vigilancia y reconocimiento aéreo para la prevención de incendios tiene su aplicación fundamental en la detección de focos de fuego incipientes en campo abierto, con el fin de evitar la formación de incendios forestales de grandes magnitudes. Es capaz de vigilar grandes superficies de terreno. Está basado en una aeronave no tripulada que transporta un conjunto de sensores para la detección de fuegos y que está en permanente comunicación con una estación móvil en tierra.
(16/10/1996). Solicitante/s: MATRA BAE DYNAMICS LTD. Inventor/es: STAMPER, RALPH H., NORMAN, DEBORAH.
UNA BATERIA DE ESTACIONES DE LANZAMIENTO DE MISILES DISPERSADOS (1 CIONES LA CUAL ASIGNA DIFERENTES OBJETIVOS A LAS RESPECTIVAS ESTACIONES DE LANZAMIENTO. LA ESTACION DE COMUNICACIONES ASEGURA QUE SOLAMENTE UNA ESTACION DE LANZAMIENTO SE OCUPE DE CADA OBJETIVO.
PROCEDIMIENTO Y DISPOSITIVO PARA LA CONDUCCION DE AUTOMOVILES A UN PUNTO DADO.
(16/03/1981). Solicitante/s: BLAUPUNKT-WERKE GMBH.
SISTEMA PARA LA CONDUCCION DE AUTOMOVILES A UN PUNTO DADO. EN UNA MEMORIA SE ALMACENAN DATOS CORRESPONDIENTES A LA ZONA DE CIRCULACION, DONDE SE COLOCAN PUNTOS DE REFERENCIA DE SITUACION, CONSTITUIDOS POR EMISORAS DE ONDA CORTA , CONECTADOS, MEDIANTE UN RECEPTOR , A UN BLOQUE DE EVALUACION CENTRAL CONECTADO A UNA INSTALACION RECEPTORA , PARA PUNTO DE DESTINO DESEADO, Y A UN EMISOR PARA ORDENES DE MARCHA.
{kind=link}
{kind=link}
{kind=link}
{kind=link}