CIP-2021 : G01B 11/00 : Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00).
CIP-2021 › G › G01 › G01B › G01B 11/00[m] › Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00).
G01B 11/02 · para la medida de la longitud, la anchura o el espesor (G01B 11/08 tiene prioridad).
G01B 11/03 · · mediante la medida de coordenadas de puntos.
G01B 11/04 · · especialmente adaptados para medir la longitud o la anchura de objetos en movimiento.
G01B 11/06 · · para la medida del espesor.
G01B 11/08 · para la medida de diámetros.
G01B 11/10 · · de objetos en movimiento.
G01B 11/12 · · diámetros internos.
G01B 11/14 · para la medida de la distancia o la separación entre objetos espaciados o entre aberturas espaciadas (G01B 11/26 tiene prioridad; telémetros G01C 3/00).
G01B 11/16 · para la medida de la deformación de un sólido, p. ej. galga extensiométrica óptica.
G01B 11/22 · para la medida de la profundidad.
G01B 11/24 · para la medida de contornos o curvaturas.
G01B 11/245 · · que utilizan una pluralidad de transductores fijos que funcionan simultáneamente (G01B 11/255 tiene prioridad).
G01B 11/25 · · mediante la proyección de un patrón, p. ej.franjas de Moiré, sobre el objeto (G01B 11/255 tiene prioridad).
G01B 11/255 · · para la medida de radios de curvatura.
G01B 11/26 · para la medida de ángulos o conicidades; para ensayar la alineación de ejes.
G01B 11/27 · · para ensayar la alineación de ejes.
G01B 11/275 · · para ensayar la alineación de ruedas.
G01B 11/28 · para la medida de áreas (integradores en general G06G).
G01B 11/30 · para la medida de la rugosidad o la irregularidad de superficies.
CIP2021: Invenciones publicadas en esta sección.
DISPOSITIVO MEDIDOR DE POSICIÓN.
(15/03/2012) Dispositivo medidor de posición con una escala graduada y un dispositivo de exploración móvil relativamente respecto a ésta en dirección de medición (X), en el que
- la escala graduada presenta una graduación de medición y se pueden generar señales periódicas de medición (M1, M2, M3) mediante la exploración de la graduación de medición ,
- la escala graduada presenta al menos una marca de referencia y se puede generar una señal de marca de referencia (R1, R2) mediante la exploración de la marca de referencia ,
- la escala graduada presenta marcas de zona explorables ópticamente y mediante…
SISTEMA PARA LA DETECCION DE OBSTACULOS EN VEHICULOS, APLICADO A MAQUINAS DE LAVADO.
(06/06/2011) Sistema para la detección de obstáculos en vehículos, aplicado a máquinas de lavado.Incluye un elemento emisor y otro receptor acoplados al puente móvil de lavado. El elemento emisor está definido por un puntero láser montado en un cuerpo acoplado al puente móvil y que posee un orificio axial de salida del haz láser . Desde la cara frontal del puntero hasta el orificio de salida se forma una cámara inicialmente cilíndrica y después cónica hasta alcanzar dicho orificio de salida del haz láser .Existe una entrada de aire a presión desde una conducción externa pasante por un orificio radial del cuerpo abierto a la cámara , saliendo este aire por dicho orificio axial y por otro radial ubicado en una posición retrasada respecto del…
SISTEMA Y MÉTODO DE MEDICIÓN DE DIMENSIONES DE UN PAQUETE.
(04/05/2011) Un sistema de medición de dimensiones de un paquete que comprende: sensores de imagen, en particular cámaras de exploración en línea, orientadas para captar la imagen de un paquete; un subsistema de formación de imágenes configurado para unir juntas las salidas de los sensores de imagen para producir al menos una imagen en dos dimensiones que consta de una pluralidad de pixeles; un subsistema de dimensiones generales que incluye información de dimensiones generales de paquetes; y un subsistema de dimensionado fino configurado para determinar mediciones de dimensiones del paquete utilizando al menos una imagen en dos dimensiones y la información de las dimensiones…
SISTEMA OPTICO, PROCEDIMIENTO Y PROGRAMA DE ORDENADOR PARA DETECTAR LA PRESENCIA DE UN ELEMENTO BIOLOGICO VIVO.
(08/04/2011) Comprende al menos un par de fuentes de luz que emiten una radiación electromagnética pulsada en la zona del infrarrojo cercano; al menos un par de fuentes de luz que emiten una radiación en la zona del ultravioleta próximo; al menos un fotodetector con la banda de absorción situada en la zona del infrarrojo cercano, para detectar una radiación pulsada transmitida y reflejada en el elemento biológico, a partir de la radiación pulsada emitida por el par de fuentes de luz que emiten la radiación en el infrarrojo cercano; al menos un fotodetector con la banda de absorción situada en la zona del ultravioleta próximo, para detectar una radiación pulsada transmitida y reflejada en el elemento biológico, a partir de la radiación pulsada emitida por el par…
PROCESO PARA IDENTIFICAR UNA SEÑAL LUMINOSA EN UN GONIOMETRO ENTRE OTRAS SEÑALES LUMINOSAS POTENCIALMENTE PERTUBADORAS.
(16/03/2007) Proceso para identificar una señal luminosa usada en un sensor óptico lineal de un goniómetro , de un tipo usado para medir ángulos característicos de ruedas de un vehículo de motor, en el cual la señal luminosa se produce mediante un rayo luminoso con una dirección predeterminada con respecto a la cual se mide un ángulo, el ángulo estando formado entre la dirección del rayo luminoso y un eje de referencia del goniómetro el cual eje de referencia es perpendicular al sensor óptico lineal , el sensor óptico lineal estando constituido por una pluralidad de elementos fotosensibles contiguos y alineados, por medio de los cuales elementos…
PROCEDIMIENTO PARA DETERMINAR LA POSICION DE UN SISTEMA DE COORDENADAS DE UNA PIEZA DE TRABAJO EN EL ESPACIO 3D.
(16/03/2007) Procedimiento para determinar la posición de una pieza de trabajo (D) y la posición de características de la pieza de trabajo en el espacio 3D usando al menos dos cámaras electrónicas (c) y un procesamiento digital de imágenes, según el cual las cámaras (c) son calibradas a un sistema de coordenadas global común y, a continuación, la pieza de trabajo (d) se sitúa en el espacio entre las cámaras (c), caracterizado porque - para elaborar el sistema de coordenadas global común, las cámaras (c) se tratan individualmente como modelos de cámaras con diafragma perforado, - se realiza una medición directa de la posición del orificio de entrada de luz y de la orientación de cada cámara, midiendo la posición del orificio de entrada de luz y la…
PROCESO PARA GENERACION DE UNA IMAGEN INFORMATIZADA DE UN OBJETO TRIDIMENSIONAL CON REVESTIMIENTO.
(01/03/2007) Un proceso para la generación de una imagen informatizada de un objeto tridimensional con revestimiento, que comprende los pasos de: a) preparar un revestimiento que comprende una capa de revestimiento pertinente con espesor de capa variable en al menos un panel de prueba, b) tomar una pluralidad de mediciones de al menos una propiedad óptica de la superficie como función del espesor de capa de la capa de revestimiento pertinente, c) almacenar los datos ópticos en un fichero de datos con consignación del espesor de capa de la capa de revestimiento pertinente, caracterizado porque el proceso comprende además los pasos de: d) facetear por ordenador las superficies visibles de un objeto tridimensional en un número…
LOCALIZADOR Y SISTEMA OPTICO DE MEDICION.
(16/02/2006). Ver ilustración. Solicitante/s: AXIOS 3D SERVICES GMBH. Inventor/es: BROERS, HOLGER.
Localizador de un sistema óptico de navegación para la determinación de la posición y/o de la situación de cuerpos en el espacio, el cual presenta un dispositivo registrador para el registro de señales luminosas generadas o reflectadas mediante unos elementos reflectores en localizadores un dispositivo de mando y evaluación, unido al dispositivo registrador, para el mando y realización de la determinación de la posición a base de los registros del dispositivo registrador logrados en varios pasos o etapas de detección, con un conmutador mecano-óptico para la puesta en acción de los pasos de detección del dispositivo registrador y/o de pasos de evaluación o interpretación en el dispositivo de mando y de evaluación, caracterizado por el hecho de que el conmutador mecano-óptico presenta un elemento reflector movible, excedente con respecto a la cantidad de los elementos reflectores utilizados para la determinación de la posición.
APARATO DE POSICIONAMIENTO SIN CONTACTO.
(16/10/2005) Un aparato sin contacto para posicionar un dispositivo de trabajo, prueba o inspección de una superficie con respecto a una superficie a trabajar, probar o inspeccionar en una posición y orientación deseadas con respecto a la misma, que incluye una placa de base situable a una cierta distancia fuera de superficie, medios para montar el dispositivo de trabajo, prueba o inspección de superficie sobre la placa de base, tres o más unidades de telémetros (6a, b, c) montadas en forma desmontable en una matriz separada (6d) sobre la placa de base, cada una de cuyas unidades incluye una fuente para la incidencia…
METODO PARA DETERMINACION DE ATRIBUTOS DE POBLACION Y PROGRAMA DE ORDENADOR PARA REALIZAR EL METODO.
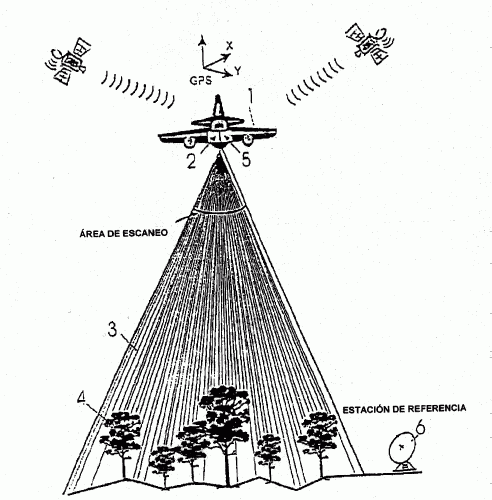
(16/10/2005). Ver ilustración. Solicitante/s: DIWARE OY. Inventor/es: HYYPPI, JUHA.
Método para la determinación de los atributos de población con un instrumento situado por encima de la población caracterizado porque a) se recoge la información tridimensional de la población usando un escáner de láser y usando un número de impactos de muestra tal que se pueden distinguir los árboles individuales o los grupos de árboles. b) se obtiene una presentación tridimensional de la altura de la población a partir de la información recogida. c) se determinan a partir de dicha presentación tridimensional los atributos de la población, que son características de los árboles individuales o los grupos de árboles y/o características de las áreas mayores de población.
PROCEDIMIENTO Y DISPOSICION PARA DETECTAR LA GEOMETRIA DE OBJETOS MEDIANTE UN DIPOSITIVO DE MEDICION POR COORDENADAS.
(01/07/2005). Ver ilustración. Solicitante/s: WERTH MESSTECHNIK GMBH. Inventor/es: CHRISTOPH, RALF.
Procedimiento para la medición de la geometría de objetos mediante un dispositivo de medición por coordenadas con un sistema óptico para la detección y representación de al menos una mancha luminosa, un punto luminoso, una transición de contraste y/o un canto cuya posición es determinada por la geometría en al menos un detector , cuyas señales de salida son valoradas, pudiendo ajustarse con el sistema óptico una escala de representación seleccionable y una distancia seleccionable del objeto en cuestión, caracterizado porque el sistema óptico incluye un sistema de lentes con distancia focal regulable , cuyos grupos de lentes son desplazados de forma independiente en cada caso, mediante accionamiento por motor, a posiciones para la escala de representación y la distancia del objeto.
PROCEDIMIENTO Y DISPOSITIVO PARA LA MEDICION DE ESTRUCTURAS DE UN OBJETO.
(01/05/2004). Solicitante/s: WERTH MESSTECHNIK GMBH. Inventor/es: CHRISTOPH, RALF.
Procedimiento para la medición de estructuras de un objeto por medio de un elemento de exploración que está asociado a un aparato de medición de coordenadas y que parte desde un árbol elástico flexible , donde el elemento de exploración se pone en contacto con el objeto y a continuación se determina directa o indirectamente su posición con un sensor óptico a través de al menos una marca de destino asociada al elemento de exploración, caracterizado porque el árbol se extiende, con la excepción de una longitud de flexión libre, que comprende el elemento de exploración y/o la marca de destino, dentro de una guía rígida o esencialmente rígida y porque la fuerza de exploración que se produce entre el elemento de exploración y el objeto en contacto con éste, se ajusta a un valor adaptado a las particularidades del objeto a través de la previsión de la longitud de flexión.
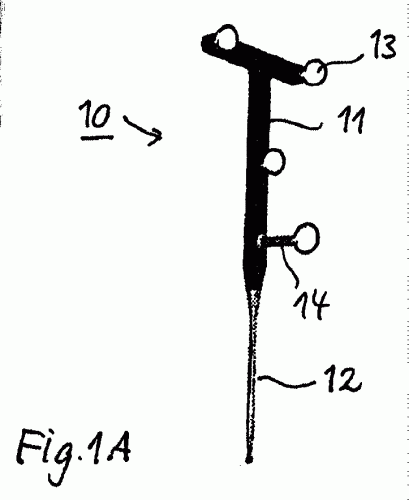
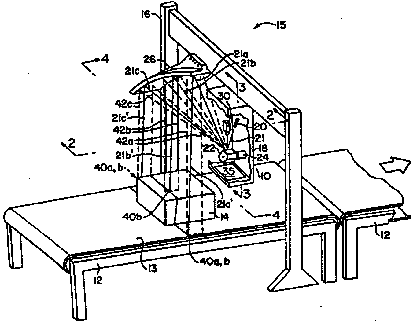
(16/04/2004). Ver ilustración. Solicitante/s: BAE SYSTEMS PLC. Inventor/es: GOOCH, RICHARD, MICHAEL, WALKER, CAROL, ANNE, ANDERSON, JOHN, STEWART.
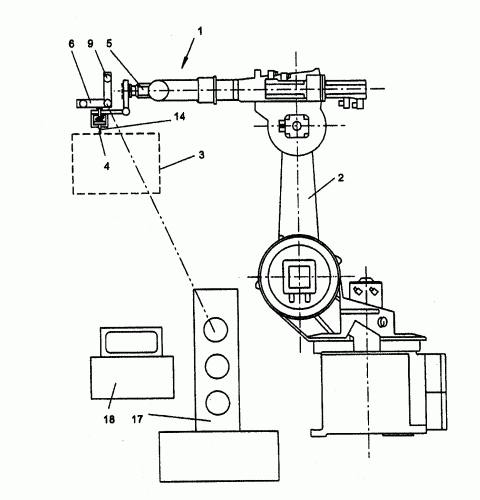
Un método para situar un punto de montaje (P) sobre una primera parte , en cuyo punto de montaje dicha primera parte ha de ser unida a una segunda parte , cuyo método comprende las operaciones de: - medir y determinar un emplazamiento de montaje (1a, 1b, 1c, 1d) sobre la segunda parte; - medir (22, 42a, 42b, 42c) una parte de una superficie (40a) de la primera parte, cuya superficie está separada de la segunda parte de modo que define la posición y orientación de la superficie de la primera parte; - calcular un vector (N) que pasa entre el emplazamiento de montaje determinado y la superficie de la primera parte; y - calcular dónde el vector intersecta la superficie de la primera parte, con lo que el punto de montaje se localiza sobre la superficie de la primera parte.
INSTALACION PARA EL REGISTRO METROTECNICO TRIDIMENSIONAL DE LA POSICION DE PUNTOS DE LA SUPERFICIE DE UN OBJETO A MEDIR.
(01/03/2004) LA INVENCION TRATA DE UN PROCEDIMIENTO PARA REGISTRAR MEDIANTE TECNICA DE MEDICION LA POSICION TRIDIMENSIONAL ESPACIAL DE UNOS PUNTOS SUPERFICIALES DE UN OBJETO A MEDIR (OBJETO DE MEDICION) EN UN SISTEMA ON LINE FOTOGRAMETRICO, MARCANDOSE MECANICAMENTE CON EL PUNTERO DE UN PULSADOR UN PUNTO SUPERFICIAL A MEDIR (OBJETO DE MEDICION), REGISTRANDOSE DESPUES LA POSICION TRIDIMENSIONAL ESPACIAL DEL PUNTERO EN EL MOMENTO DE LA MARCACION CON RESPECTO A UN SISTEMA DE REFERENCIA MEDIANTE AL MENOS UNA CAMARA ELECTRONICA Y RETENIENDOSE EN FORMA DE DATOS LAS COORDENADAS ESPACIALES TRIDIMENSIONALES OBTENIDAS. PARA PODER REGISTRAR GRANDES VOLUMENES DE MEDICION CON UNOS PROCESOS DE CALCULO SENCILLOS, SE PROPONE UTILIZADOR, SEGUN LA INVENCION, UN PULSADOR CON EL QUE ESTE FIRMEMENTE UNIDA AL…
SISTEMA DE MEDICION DE LAS CARACTERISTICAS DE UN OBJETO.
(01/10/2003). Ver ilustración. Solicitante/s: AEROSPATIALE SOCIETE NATIONALE INDUSTRIELLE. Inventor/es: BOURGOIN, JEAN-PIERRE, JACQUOT, JEAN-MICHEL, CONNAN, PATRICK, FLE, BENOæT.
LA PRESENTE INVENCION SE REFIERE A UN SISTEMA DE MEDIDA DE LAS CARACTERISTICAS DE UN OBJETO Y COMPRENDE: CAMARAS DIRIGIDAS, SEGUN DOS DIRECCIONES DIFERENTES, HACIA EL ESPACIO DE COLOCACION DEL OBJETO , SITUADO SOBRE EL PLANO SUPERIOR DE UNA PRIMERA CAJA DE LUZ, Y CONECTADAS A UN ORGANO DE TRATAMIENTO; DE UNA BALANZA Y LA SEGUNDA EN UN PLANO VERTICAL POR ENCIMA Y A UN LADO DEL PLANO SUPERIOR DE LA PRIMERA; DE TRATAMIENTO CONECTADO, POR UNA PARTE, A UN ORGANO DE ENTRADA DE INFORMACION Y, POR OTRA, A UN ORGANO DE VISUALIZACION ;.
SISTEMA DE CUBICAJE Y ANALISIS GEOMETRICO DE MADERA EN ROLLO PARA ASERRADO DE LA MISMA.
(16/02/2003). Ver ilustración. Solicitante/s: ECOFORESTAL IBERICA DE MADERAS, S.A. Inventor/es: DOMINGUEZ CASASECA,CARLOS LUIS.
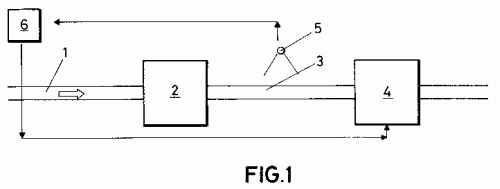
Sistema de cubicaje y análisis geométrico de madera en rollo para aserrado de la misma El sistema tiene como finalidad permitir descargar directamente la madera en rollo, es decir las trozas de madera de los correspondientes vehículos de transporte, sobre la línea de alimentación de la máquina descortezadora , evitando las clásicas operaciones manuales de cubicaje, medición y clasificación de las trozas. Se materializa en un láser de lectura dimensional, establecido entre la descortezadora y la tronzadora , capaz de medir las trozas y de analizar la forma geométrica de las mismas, suministrando información a un ordenador , que a su vez recibe también información referente a pedidos de clientes y medidas comerciales más utilizadas en el mercado, conjugando dichos datos y generando las órdenes de corte oportunas a la tronzadora , para conseguir un aprovechamiento integral de la madera en cada troza.
PROCEDIMIENTO PARA LA PRODUCCION DE FIBRAS VITREAS ARTIFICIALES.
(01/10/2002). Solicitante/s: ROCKWOOL INTERNATIONAL A/S. Inventor/es: JENSEN, SOREN, LUND.
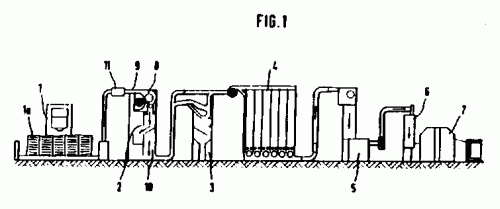
Procedimiento para la preparación de fibras vítreas artificiales que comprende formar una masa fundida fundiendo una carga de material mineral en un horno y haciendo fluir la masa fundida a un aparato centrífugo de formación de fibras y formar fibras mediante la formación centrífuga de fibras a partir de la masa fundida en condiciones de formación de fibras, caracterizado porque el análisis químico de la masa fundida o de las fibras se controla en línea para determinar la desviación a partir de un valor deseado y, cuando se observa una desviación, la masa fundida que fluye al aparato centrífugo de formación de fibras y/o las condiciones de formación centrífuga de fibras se ajusta(n) de un modo sustancialmente inmediato en respuesta a la desviación.
DISPOSITIVO PARA EFECTUAR EL SEGUIMIENTO DE LA POSICION DE UNA CABEZA COMPACTA PARA UN SISTEMA DE REALIDAD VIRTUAL DE BAJO COSTE.
(16/09/2002) SE PRESENTA UN APARATO PARA VISIONAR IMAGENES GENERADAS POR ORDENADOR Y PARA MONITORIZAR LA POSICION DE LA CABEZA DEL USUARIO Y DE LA MANO . UNA ALTERNATIVA DEL APARATO INCLUYE UN ELEMENTO DE ARMADURA , MONTADO DE FORMA VERSATIL, CON UNOS SENSORES PARA EL SEGUIMIENTO DE LA CABEZA DE UN USUARIO CUYO MOVIMIENTO CORPORAL ESTA RESTRINGIDO A UNA PEQUEÑA AREA. SE DISPONE UNA HILERA CORTA DE SENSORES BARATOS PARA SEGUIR LA POSICION DE LA CABEZA DEL USUARIO . ESTOS SENSORES SE DESPLIEGAN PARCIALMENTE SOBRE LA CABEZA DEL USUARIO Y PARCIALMENTE SOBRE LA ARMADURA DE SEGUIMIENTO . TODOS LOS DISPOSITIVOS ELECTRONICOS PARA EL SEGUIMIENTO Y LAS ENTRADAS EFECTUADAS POR EL…
METODO PARA MEDIR TAMAÑOS DE UN MOLDE Y DE COMPONENTES ASOCIADOS AL MOLDE MEDIANTE UN INSTRUMENTO DE MEDICION POR LASER.
(16/06/2002) UN METODO PARA MEDIR DE UN MODO PRECISO Y ALTAMENTE CORRECTO LA DISTANCIA ENTRE LA SUPERFICIE EN UNA DETERMINADA POSICION DEL MOLDE Y UN INSTRUMENTO DE MEDIDA LASER. LA DISTANCIA ENTRE LA SUPERFICIE DE UN ARMAZON DEL MOLDE Y EL INSTRUMENTO DE MEDIDA LASER SE MIDE DIRIGIENDO UN RAYO LASER A CUATRO POSICIONES SOBRE LA SUPERFICIE DEL ARMAZON DEL MOLDE, LAS POSICIONES SOBRE LA SUPERFICIE DEL ARMAZON DEL MOLDE SE EXPRESAN MEDIANTE COORDENADAS X-Y MIENTRAS QUE LA DISTANCIA ENTRE LA SUPERFICIE DEL ARMAZON DEL MOLDE Y EL INSTRUMENTO DE MEDIDA LASER SE EXPRESA POR LA COORDENADA Z. UNA ECUACION {DL}Z = AX + BY + C PARA CORREGIR EL VALOR DE LA MEDIDA DE LA DISTANCIA ENTRE LA SUPERFICIE DEL ARMAZON DEL MOLDE Y EL INSTRUMENTO DE MEDIDA LASER SE DETERMINA MEDIANTE LA UTILIZACION DE LOS CUATRO VALORES DE MEDIDA Y EL VALOR MAXIMO O MINIMO DE ESTOS VALORES…
SISTEMA AUTOMATIZADO DE RECUENTO DE EXTREMOS.
(16/06/2002) SE PRESENTA UNA UNIDAD DE EXPLORACION MOVIL BIEN DE RAYO ENFOCADO O ESPACIAL QUE SE SUJETA A UN BRAZO HORIZONTAL MOVIL QUE SE SUJETA A UN SOPORTE DE MANERA QUE LA UNIDAD DE EXPLORACION PUEDA SER CONTROLABLEMENTE DIRIGIDA A TRAVES DE UN PLANO VERTICAL-HORIZONTAL PRESCRITO QUE ES PARALELO A UN EXTREMO DE UNA UNIDAD DE TABLON . SOPORTES SEPARADOS SE COLOCAN EN CADA EXTREMO DE LA UNIDAD . A TRAVES DEL MOVIMIENTO AUTOMATICO DIRIGIDO, LA UNIDAD DE EXPLORACION EMITE UN RAYO ENFOCADO Y/O RECIBE RAYOS DE ENERGIA REFLEJADA (38 Y 48) QUE HAN SIDO REFLEJADOS DESDE EL EXTREMO DE LA UNIDAD . ESTOS RAYOS REFLEJADOS ESTAN DE ACUERDO…
PROCEDIMIENTO Y DISPOSITIVO PARA MEDIR Y VERIFICAR PIEZAS.
(16/11/2001). Ver ilustración. Solicitante/s: KUKA SCHWEISSANLAGEN GMBH. Inventor/es: MOLLER, MATTHIAS.
LA INVENCION SE REFIERE A UN PROCEDIMIENTO Y A UN DISPOSITIVO PARA MEDIR Y CONTROLAR PIEZAS DE LA CARROCERIA DE AUTOMOVILES . LA MEDICION SE REALIZA CON UNA SONDA MEDIDORA , QUE TIENE UNA GALGA Y UNO O VARIOS INDICADORES DE POSICION . UN MANIPULADOR COLOCA LA SONDA MEDIDORA CON LA GALGA SOBRE UNO O VARIOS PUNTOS DE MEDICION DE LA PARTE DE LA CARROCERIA . A CONTINUACION SE MIDEN LOS INDICADORES DE POSICION POR PARTE DE UN SISTEMA EXTERIOR OPTICO RELACIONADO CON EL LUGAR, A FIN DE DETERMINAR LA POSICION. LA POSICION DE LOS PUNTOS DE MEDICION SE OBTIENE A PARTIR DE LOS DATOS DE MEDIDA. LA SONDA MEDIDORA MANTENIDA POR EL MANIPULADOR PUEDE DESVIARSE DE MANERA ELASTICA CON RELACION A UNO O VARIOS EJES.
PROCEDIMIENTO PARA LA DETERMINACION OPTICA DE LA POSICION DE UN OBJETO TRIDIMENSIONAL.
(01/11/2001). Solicitante/s: ERSU, ENIS. Inventor/es: ERSU, ENIS.
UN PROCEDIMIENTO PARA LA DETERMINACION OPTICA DE LA POSICION DE UN CUERPO RIGIDO FINITO EN UN SISTEMA DE COORDENADAS SE PROPONE PARA RESOLVER EL PROBLEMA CUANDO NO SE CONOZCA LA POSICION RESPECTIVA DE LA HERRAMIENTA Y DE LA PIEZA AL UTILIZAR UN ROBOT, PODER TRABAJAR EN LA PIEZA CON SEGURIDAD, QUE DE UNA SELECCION DE VARIAS LINEAS O ARISTAS EXISTENTES EN EL CUERPO RIGIDO QUE ESTEN EN RELACION CON EL SISTEMA DE COORDENADAS PROPIO DEL CUERPO, CADA LINEA O CADA ARISTA SE REPRODUZCA EN UN SISTEMA DE COORDENADAS PLANAS ASIGNADO A ELLA Y QUE LA POSICION DE CADA SISTEMA DE COORDENADAS PLANO ESTE REFERIDO AL SISTEMA DE COORDENADAS TRIDIMENSIONAL.
DETECTOR DE PARTICULAS EXTRAÑAS EN PRODUCTOS ALIMENTICIOS.
(16/06/2001). Ver ilustración. Solicitante/s: INICIATIVAS MECANICAS, S.L. Inventor/es: LUQUE VARO,ANTONIO.
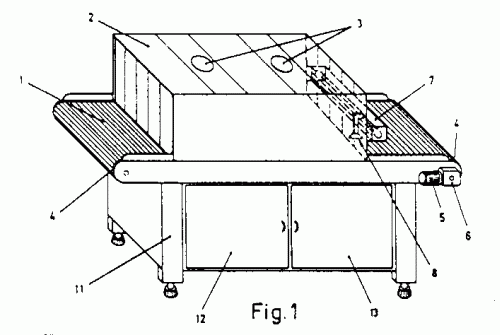
Detector de partículas extrañas en productos alimenticios, que consiste en una cinta transportadora de los productos a inspeccionar, la cual pasa por un túnel provisto con células o cámaras capaces de realizar una inspección a través de los productos transportados por la cinta , yendo por detrás del túnel un medio, tal como un barredor transversal , para la retirada ocasional de una parte de los productos transportados, cuando las células o cámaras detectan algún objeto extraño en los productos inspeccionados.
SENSOR PARA LA MEDIDA DEL INDICE DE REFRACCION Y LA TEMPERATURA DE UN FLUIDO, CONSISTENTE EN UN ESPEJO TALLADO EN EL EXTREMO DE UNA FIBRA OPTICA Y UNA O VARIAS REDES DE DIFRACCION DE BRAGG INSCRITAS EN LA FIBRA.
(01/06/2001) Sensor para la medida del índice de refracción, o del índice de refracción y la temperatura de un fluido o mezcla reactante, consistente en un espejo tallado en el extremo de una fibra óptica y una o varias redes de difracción de Bragg inscritas en el núcleo de la fibra. La interrogación del sensor se realiza mediante un dispositivo que consiste en una fuente de luz blanca (no monocromática), un dispositivo analizador de espectro óptico, un acoplador óptico y, de forma optativa, un dispositivo de multiplexación óptica. El sensor permite obtener el índice de refracción del medio en que se encuentra inmerso su extremo especular a través de las variaciones de la potencia óptica reflejada en el mismo y detectadas por el…
DISPOSITIVO EN UNA INSTALACION DE PREPARACION DE HILATURA (LIMPIEZA) PARA IDENTIFICAR Y SEPARAR CUERPOS EXTRAÑOS, TALES COMO TROZOS DE TEJIDO, CINTAS, CORDONES, TROZOS DE LAMINA EN Y DE MATERIAL FIBROSO.
(16/03/2001). Ver ilustración. Solicitante/s: TRUTZSCHLER GMBH & CO. KG.. Inventor/es: SCHLICHTER,STEFAN, CIESLINSKI,MICHAEL.
Dispositivo en una instalación de preparación de hilatura (limpieza) para identificar y separar cuerpos extraños, tales como trozos de tejido, cintas, cordones, trozos de lámina, en y de material fibroso que se toma de balas de fibras con un abridor de balas, en el que está previsto un sistema sensor óptico para la identificación de los cuerpos extraños, a continuación del cual está dispuesto un dispositivo de separación para separar los cuerpos extraños, y en el que el sistema sensor óptico está enlazado a través de un dispositivo de evaluación y un dispositivo de mando con el dispositivo de separación.
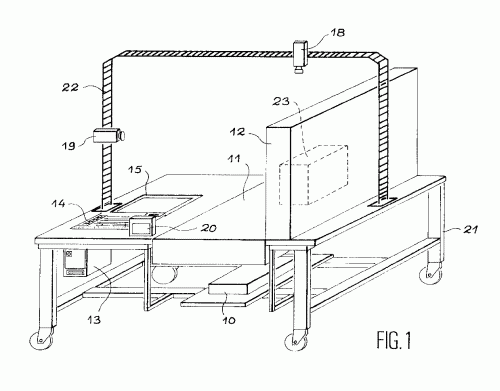
(16/02/2000). Ver ilustración. Solicitante/s: ACCU-SORT SYSTEMS, INC. Inventor/es: WURZ, ALBERT, ROMAINE, JOHN, E., MARTIN, DAVID, L.
LA INVENCION PRESENTE PROPORCIONA UN SISTEMA DE DIMENSIONAMIENTO PARA DETERMINAR EL TAMAÑO MINIMO DE UNA CAJA, LA CUAL SE NECESITA PARA CONTENER A UN OBJETO QUE SE ESTA DESPLAZANDO EN UN TRANSPORTADOR EN MOVIMIENTO. EL SISTEMA DE DIMENSIONAMIENTO ESTA COMPUESTO POR UNA FUENTE DE LUZ, LA CUAL GENERA UN HAZ DE EXPLORACION QUE SE MUEVE MEDIANTE UNA RUEDA REFLECTORA. UNA CAMARA DE EXPLORACION DE LINEAS, CUYO CAMPO DE VISION REGISTRA EL HAZ DE EXPLORACION QUE ESTA EN MOVIMIENTO, RECIBE LAS IMAGENES DEL HAZ DE EXPLORACION Y PRODUCE UNA SEÑAL, LA CUAL SE PROCESA PARA CALCULAR UNA ESTRUCTURA TRIDIMENSIONAL DE LA CAJA DEL OBJETO QUE SE HA EXPLORADO.
CAMARA LINEAL INTELIGENTE.
(16/12/1998). Ver ilustración. Solicitante/s: CENTRO TECNOLOGICO ROBOTIKER. Inventor/es: GARCIA-TEJEDOR PEREZ,JAVIER, IBAÑEZ EREÑO, PEDRO.
CAMARA LINEAL INTELIGENTE. LA CAMARA INCORPORA UN SENSOR OPTICO PARA LA CAPTACION DE IMAGENES, UN MICROCONTROLADOR , UN VISUALIZADOR ALFANUMERICO Y UN TECLADO, CONECTANDOSE EL SENSOR OPTICO DIRECTAMENTE AL MICROCONTROLADOR SIN NECESIDAD DE ACONDICIONAR LA SEÑAL ANTES DEL TRATAMIENTO DIGITAL DE LA MISMA Y UTILIZANDOSE ESTE MISMO MICROCONTROLADOR PARA EL PROCESADO DE LOS DATOS RECIBIDOS O ENVIADOS POR EL VISUALIZADOR Y EL TECLADO, CONSTITUYENDO ASI UN SISTEMA DE INSPECCION COMPLETO DE REDUCIDO TAMAÑO Y FACIL INSTALACION, QUE PERMITE, A TRAVES DEL TECLADO INCORPORADO, REALIZAR AJUSTES DE PARAMETROS, SELECCION DE MODOS OPERATIVOS Y/O DE FUNCIONES A REALIZAR POR LA CAMARA.
SISTEMA DE SENSORES DE ALINEACION DE COMPONENTES DE ALTA PRECISION.
(01/05/1998) UN SISTEMA LASER, DETECTOR DE ALINEAMIENTO, PARA USO SOBRE MAQUINAS DE COLOCACION DE COMPONENTES DE MONTAJES SUPERFICIALES. EL SISTEMA ESTA FORMADO POR UN LASER QUE PASA A TRAVES DE UNA LENTE COLIMADORA, A CONTINUACION A TRAVES DE UNA ABERTURA QUE CREA UNA FRANJA DE LUZ COLIMADA, QUE SE ENFOCA PASADO EL COMPONENTE QUE SE ESTA ALINEANDO PARA INCIDIR EN UN CONJUNTO O FORMACION DE DETECTORES DE CCD. DURANTE EL TRANSITO DEL COMPONENTE ENTRE EL DEPOSITO DE COMPONENTES Y EL CUADRO DE CIRCUITOS, GIRA EL COMPONENTE; LA SOMBRA QUE CAE SOBRE LA FORMACION DE DETECTORES SE MONITORIZA. CUANDO SE DETECTA LA MINIMA ANCHURA DE LA SOMBRA, SE DETERMINA LA ORIENTACION CORRECTA ANGULAR, EL PROMEDIO DE LOS BORDES DE LA SOMBRA COMPARADO CON EL CENTRO DEL MANGUITO O VAINA DETERMINA LA POSICION COORDINADA DEL COMPONENTE SOBRE EL CITADO MANGUITO O VAINA.…
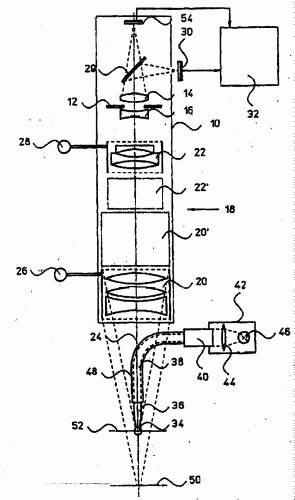
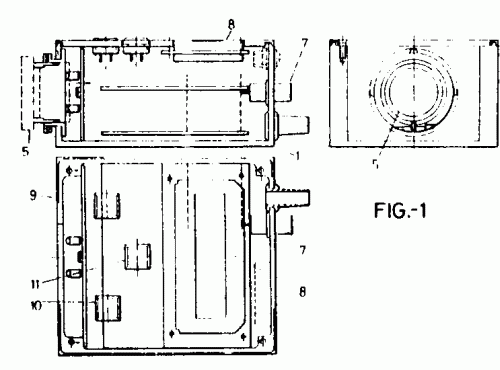
(16/02/1997) SE PRESENTA UNA SONDA PARA UN APARATO PARA LA DETERMINACION DE LA POSICION Y SIMILARES QUE TIENE DENTRO DE LA SONDA UN ESPACIO DE MEDICION , UN ESTILETE SOPORTADO PARA EL MOVIMIENTO DE DETERMINACION DE LA POSICION Y QUE SE EXTIENDE AL INTERIOR DE DICHO ESPACIO, MEDIOS PARA EMITIR AL INTERIOR DE DICHO ESPACIO UNA RADIACION DE MEDICION Y MEDIOS PARA RECOGER DICHA RADIACION DE MEDICION DESDE DICHO ESPACIO, DICHO ESTILETE SOPORTA DENTRO DE DICHO ESPACIO MEDIOS PARA DESVIAR DICHA RADIACION DE MEDICION EMITIDA Y PUEDEN MOVERSE CON EL MOVIMIENTO DE DETERMINACION DE LA POSICION DEL ESTILETE, DICHO ESTILETE SE ENCUENTRA SOPORTADO PARA EFECTUAR UN MOVIMIENTO DE DETERMINACION DE LA POSICION TRIDIMENSIONAL, DICHOS MEDIOS DE DESVIACION CONCENTRAN…
METODO Y DISPOSITIVO PARA LA INSPECCION DE TABLETAS.
(01/11/1995). Solicitante/s: ADVANCED NUCLEAR FUELS GMBH. Inventor/es: OSSEFORTH, EWALD.
PARA PODER COMPROBAR TABLETAS (TB) DE FORMA SENCILLA Y PRECISA EN EL TRATAMIENTO Y EN EL MODO DE FUNCIONAR, SE INDICA EL CORRESPONDIENTE METODO Y UN DISPOSITIVO PARA LA REALIZACION DEL MISMO. PARA ELLO SE SEPARAN LAS TABLETAS (TB) QUE LLEGAN DESDE UNA MAQUINA DE RECTIFICAR (S), SE TRANSFIEREN LAS TABLETAS SEPARADAS EN UN SEPARADOR (V), SE CONTROLAN LAS TABLETAS GIRATORIAS (TB) SOBRE RODILLOS ROTATIVOS (RW1, RW2) POR DOS CAMARAS LASER (KMA, KMB) Y POR UNA CAMARA DE LINEAS (KMC) Y A CONTINUACION SE EXPULSAN SI HAY DIFERENCIAS POR UN DISPOSITIVO DE EXPULSION (AM) Y EN CASO DE QUE LAS TABLETAS (TB) ESTEN BIEN POR UN EXPULSOR FINAL (E).
PROCEDIMIENTO Y EQUIPO DE APILAMIENTO PARA MEDICION DEL VOLUMEN DE MADERA Y OTRAS DIMENSIONES DE UNA PILA DE TRONCOS.
(01/06/1995) EL OBJETO DE LA INVENCION ES UN METODO PARA MEDIR UN APILAMIENTO Y UN EQUIPO PARA MEDIR ESPECIALMENTE EL VOLUMEN DE MADERA Y OTRAS DIMENSIONES, EN CUYO METODO LAS DIMENSIONES EXTERNAS DEL MONTON, Y EL DIAMETRO MEDIO Y LONGITUD DE LOS TRONCOS SON MEDIDOS, DE DONDE SE CALCULA EL VOLUMEN. EL METODO INCLUYE LOS SIGUIENTES PASOS: SE FIJA UN RAYO DE LUZ TRANSVERSALMENTE ALREDEDOR DE LA PILA; EL RAYO DE LUZ SE FOTOGRAFIA EN UN ANGULO DESDE LA PARTE FRONTAL Y TRASERA, DESDE AMBOS LADOS Y DESDE LA PARTE SUPERIOR DEL MONTON; SE MIDE LA LOCALIZACION DEL RAYO DESDE LA IMAGEN DE VIDEO; SE RECONOCEN LAS CURVAS QUE DIBUJAN LA SUPERFICIE DE LOS TRONCOS Y SE DIFERENCIAN DE LA IMAGEN DE LA LINEA; SE CALCULA EL DIAMETRO DE LOS TRONCOS EXTERIORES EN EL PUNTO DE MEDICION, DESDE LAS CURVAS; SE REALIZA…
INSTALACION PARA MEDIR LA MASA DE UN OBJETO EVENTUALMENTE EN MOVIMIENTO.
(16/04/1995) SE DESCRIBE UNA INSTALACION PARA MEDIR LA MASA DE UN OBJETO , EVENTUALMENTE EN MOVIMIENTO CON UN DISPOSITIVO DE MEDIDA OPTOELECTRONICO, QUE COMPRENDE DIODOS (6, 6'; 8, 8') DE TRANSMISION Y DE RECEPCION DISPUESTOS EN UN PLANO DE MEDIDA TRANSVERSAL AL EJE LONGITUDINAL DEL OBJETO ASI COMO UNA BARRERA DE LUZ (9, 9') SITUADA DELANTE DEL PLANO Y UNA UNIDAD DE EVALUACION . EL OBJETO A MEDIR SE CONDUCE SOBRE EL PLANO ENTRE LOS DIODOS (6, 6'; 8, 8'). EL PLANO SE LIMITA HACIA ARRIBA CON DOS BARRAS (4, 4') DE MEDIDA, QUE FORMAN UN ANGULO DE 90 , DE UNA PUERTA DE MEDIDA, EN CUYAS SUPERFICIES LATERALES ORIENTADAS HACIA EL PLANO SE DISPONEN EN UNA BARRA (5, 5') UNA FILA DE DIODOS (6, 6') DE TRANSMISION EQUIDISTANTES…
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}