CIP-2021 : B66B 1/40 : y para corregir la nivelación en los descansillos o paradas.
CIP-2021 › B › B66 › B66B › B66B 1/00 › B66B 1/40[3] › y para corregir la nivelación en los descansillos o paradas.
Notas[g] desde B66B 1/00 hasta B66B 7/00: Características comunes de los ascensores
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B66 ELEVACION; LEVANTAMIENTO; REMOLCADO.
B66B ASCENSORES; ESCALERAS O PASILLOS MECANICOS (dispositivos salvavidas utilizados como alternativa a los medios de salida normales, p. ej. escaleras, durante el rescate, para hacer descender a las personas de los edificios u otras estructuras análogas, en jaulas, bolsas, o soportes similares A62B 1/02; equipamiento para la manipulación de cargars o para facilitar el embarque de pasajeros o similar B64D 9/00; dispositivos de frenado o de parada caracterizados por su aplicación a los mecanismos de elevación o izado B66D 5/00).
B66B 1/00 Sistemas de control de ascensores en general (dispositivos de seguridad B66B 5/00; control del funcionamiento de la puerta o barrera B66B 13/00).
B66B 1/40 · · · y para corregir la nivelación en los descansillos o paradas.
CIP2021: Invenciones publicadas en esta sección.
Gestión de la operación de frenos en ascensores.
(13/11/2019) Un procedimiento que comprende:
determinar que una cabina de ascensor de un sistema de ascensor se está acercando a un rellano ; obtener, por un controlador , un valor para al menos un parámetro asociado con el sistema de ascensor basado en la determinación de que la cabina de ascensor se está acercando al rellano ;
determinar que la cabina de ascensor llega al rellano dentro de una distancia umbral;
determinar, por el controlador , cuándo participar en al menos una de una operación de ciclo de frenado y una operación de ciclo de energía en función del valor para el al menos un parámetro y en función de determinar que la cabina de ascensor llega al rellano dentro de la distancia umbral;…
Procedimiento, unidad de control de ascensor, y sistema de ascensor para ajustar dinámicamente un límite de velocidad de nivelación de una cabina de ascensor.
(02/10/2019). Solicitante/s: KONE CORPORATION. Inventor/es: KATTAINEN, ARI, HOVI,ANTTI, AITAMURTO,JUHA-MATTI, JUSSILA,ARI.
Un procedimiento para ajustar dinámicamente un límite de velocidad de nivelación de una cabina de un ascensor durante una operación de nivelación, el procedimiento comprende:
- obtener una indicación de que se detecta que la cabina del ascensor llega a una zona ,
- obtener al menos un valor que indica la velocidad de la cabina del ascensor, en respuesta a la detección de que la cabina del ascensor llega a la zona , y
- ajustar dinámicamente el límite de velocidad de nivelación de la cabina del ascensor en base a la velocidad de la cabina del ascensor.
PDF original: ES-2763933_T3.pdf
Amortiguación activa de la oscilación vertical de una cabina de ascensor suspendido.
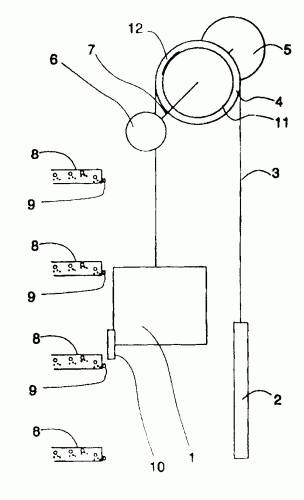
(03/07/2019) Un sistema para amortiguar las oscilaciones verticales de una cabina de ascensor suspendida en un rellano , cuyo sistema comprende:
una polea de tracción ;
un sensor adaptado para proporcionar una señal del sensor indicativa de la rotación de la polea de tracción, en la que la rotación de la polea de tracción corresponde a las oscilaciones verticales de la cabina suspendida del ascensor;
un controlador adaptado para proporcionar una señal de control basada en la señal del sensor; y
una máquina del ascensor conectada a la polea de transmisión y adaptada para reducir las oscilaciones verticales de la cabina suspendida del ascensor, controlando la rotación de la polea de tracción en función de la señal de control;
en la que el control de la rotación de la polea de tracción con la máquina del ascensor conduce la señal…
Dispositivo y método para controlar un sistema hidráulico, especialmente de un elevador.
(17/01/2018). Solicitante/s: YASKAWA Europe GmbH. Inventor/es: CELIK,KUTAY FERHAT, KENNEWEG,PHILIPP.
Dispositivo de control para control de presión en un sistema hidráulico , especialmente de un sistema de elevador , el dispositivo de control se adapta para controlarar una variable de salida (f, I, U) de un inversor suministrando a una bomba hidráulica del sistema hidráulico con energía eléctrica, la variable de salida (f, I, U) se adapta para ajustar la velocidad (S) de la bomba hidráulica con el fin de al menos compensar parcialmente una fuga de fluido de funcionamiento en la bomba hidráulica , por la que el dispositivo de control comprende un módulo de computación que se adapta para determinar la variable de salida (f, I, U) únicamente basándose en al menos un parámetro de inversor (Tx) y está caracterizado porque, en funcionamiento, cualquier variable de salida (f, I, U) se adapta para llevar a cabo una velocidad de flujo de bomba positivo.
PDF original: ES-2665246_T3.pdf
Procedimiento para accionar un dispositivo de control de ascensor.
(28/09/2016). Solicitante/s: INVENTIO AG. Inventor/es: Roussel,Frank Olivier.
Procedimiento para el funcionamiento de un dispositivo de control del ascensor previsto para el control y supervisión de los movimientos de al menos una cabina de ascensor , en el que la cabina de ascensor se aproxima, bajo el control del dispositivo de control del ascensor , a plantas individuales en un edificio y ejecuta en este caso una parada en la planta, respectivamente, en una posición de parada predeterminada, caracterizado porque en conexión con la parada en la planta se calcula un error general (G) en forma de una desviación de una posición efectiva de la cabina del ascensor así como de una posición adoptada como posición real de la cabina del ascensor , y porque el dispositivo de control del ascensor genera señales de servicio con la ayuda de una detección estadística de varios valores para el error general (G).
PDF original: ES-2658121_T3.pdf
Funcionamiento en curva de pico de confort.
(20/01/2016) Un método de control del desplazamiento de una carga desde una posición inicial conocida hasta una posición de destino conocida, en el que el desplazamiento comprenderá al menos una fase de aceleración y una posterior fase de desaceleración;
estando dicha carga conectada a unos medios de accionamiento, el cual está controlado por un controlador;
dicha carga presentando una configuración de desplazamiento predeterminada que comprende una velocidad nominal y una velocidad superlenta;
dicho método comprendiendo:
obtener una primera distancia d1 que es la distancia que, de acuerdo con la configuración de desplazamiento predeterminada, la carga debe recorrer durante su fase de aceleración con el fin de reducir la magnitud de su aceleración desde un máximo hasta cero, en el que en aceleración cero la carga debería…
Control de ascensor con respecto a los rellanos.
(06/06/2012) Método de control de ascensor, en el que el motor de un ascensor es controlado de tal manera que la velocidaddel ascensor sigue una velocidad de referencia, y que, cuando el ascensor está desacelerando, el motor escontrolado por un método de ajuste de velocidad durante la fase de desaceleración inicial y que el motor escontrolado mediante un método de ajuste de posición durante la fase de desaceleración final, caracterizado porqueel momento de transición entre el ajuste de velocidad y el ajuste de posición se determina sustancialmente pormedio de la curva de velocidad del ascensor.
Detector de junta de carril de ascensor y sistema de ascensor.
(20/03/2012) Un dispositivo de detección de junta o unión de carriles que comprende:
una parte de detección de junta o unión enfrente de un carril de guía , que tiene una pluralidad de unidades de carriles conectadas verticalmente entre sí, y se dispone en una cabina guiada por el carril de guía, para detectar la presencia de una junta o unión entre cada uno de las unidades de carril ; y
una parte de determinación de junta o unión para determinar la presencia/ausencia de la junta o unión basándose en información de la parte de detección de uniones; caracterizado porque
la parte de detección de junta o unión tiene una parte de proyección de luz para irradiar un haz de luz a una superficie del carril de guía y una parte receptora de luz para recibir una parte…
PROCEDIMIENTO Y APARATO PARA CONTROLAR EL MOTOR DE ELEVACION DE UN ASCENSOR.
(16/03/2005). Ver ilustración. Solicitante/s: KONE CORPORATION. Inventor/es: PAKARINEN, ARVO, MAENPAA, JARMO.
PARA CONTROLAR EL MOTOR DE IZAR DE UN ELEVADOR QUE INCLUYE UN NUMERO DE PLATAFORMAS Y EN LOS QUE INCLUYE UN NUMERO DE PLATAFORMAS Y EN LOS QUE LA POTENCIA DE TRANSMISION DEL MOTOR SE GENERA USANDO UNA REFERENCIA DE VELOCIDAD Y UNA SEÑAL ANGULAR PROPORCIONAL AL GIRO DEL MOTOR DE IZAR COMO UNA SEÑAL DE REALIMENTACION. LA POSICION DE LA CABINA DEL ELEVADOR RESPECTO A LA PLATAFORMA SE MIDE USANDO UN DETECTOR COLOCADO EN LA CABINA DE ELEVADOR. EL DETECTOR PRODUCE UNA SEÑAL DE POSICION PROPORCIONAL A LA DIFERENCIA DE ALTURA ENTRE LA PLATAFORMA Y EL SUELO DE LA CABINA DEL ELEVADOR. AL UTILIZAR ESTA SEÑAL DE POSICION CONTINUA,SE GENERA UNA REFERENCIA PARA CONTROLAR EL MOTOR DE IZAR CUANDO LA CABINA ESTA EN O CERCA DE LA PLATAFORMA.
AJUSTE DE LA NIVELACION DE UN ASCENSOR.
(01/03/2004) SE PRESENTA UN METODO PARA AJUSTAR UN TIEMPO DE NIVELACION DE UNA CABINA DE UN ASCENSOR. EL METODO INCLUYE LOS PASOS DE: MOVER LA CABINA DEL ASCENSOR EN UN POZO DE ASCENSOR; TRANSMITIR UNA PRIMERA SEÑAL MEDIANTE UN PRIMER SENSOR EN RESPUESTA AL MOVIMIENTO DE LA CABINA DEL ASCENSOR EN EL POZO DEL ASCENSOR; COMENZAR UNA MEDIDA DE TIEMPO EN RESPUESTA A LA DETECCION DE LA PRIMERA SEÑAL; TRANSMITIR UNA SEGUNDA SEÑAL MEDIANTE UN SEGUNDO SENSOR EN RESPUESTA AL MOVIMIENTO DE LA CABINA DEL ASCENSOR EN EL POZO DEL ASCENSOR, EL SEGUNDO SENSOR ESTA DISPUESTO A UNA DISTANCIA PREDETERMINADA DEL PRIMER SENSOR; FINALIZADO EL TIEMPO DE MEDIDA EN RESPUESTA A LA DETECCION DE LA SEGUNDA SEÑAL; DETERMINAR UN VALOR DE MEDIDA DE TIEMPO…
SISTEMA PARA DETENER O ENRASAR AUTOMATICAMENTE ASCENSORES Y SIMILARES.
(16/09/1975). Solicitante/s: UNITED STATES ELEVATOR CORPORATION.
Resumen no disponible.
{kind=link}