Vehículo de mantenimiento y procedimiento.
Vehículo de mantenimiento (1), compuesto por un bastidor de vehículo (3) apoyado por el lado de extremo sobre bogies (2) y con paredes laterales (8) dispuestas sobre el mismo para crear un espacio de trabajo (9) limitado por estas para trabajadores que se encuentran sobre una vía (7),
caracterizado por que
para el tratamiento de una sección de vía situada dentro del espacio de trabajo (9) está dispuesto en el vehículo (1) un robot industrial (18), que presenta al menos tres ejes de movimiento (14), acoplamientos de medios (15) para un suministro de energía, así como un acoplamiento de herramienta (16) para la unión opcional a una herramienta de tratamiento de vía (17).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2016/002048.
Solicitante: ROBEL BAHNBAUMASCHINEN GMBH.
Nacionalidad solicitante: Alemania.
Dirección: INDUSTRIESTRASSE 31 83395 FREILASSING ALEMANIA.
Inventor/es: MÜHLBACHER,CHRISTOPH, SCHMID,GREGOR.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B61D15/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B61 FERROCARRILES. › B61D PARTES CONSTITUTIVAS O TIPOS DE VEHICULOS FERROVIARIOS (vehículos en general B60; adaptación de vehículos a sistemas ferroviarios especiales B61B; chasis B61F). › Otros vehículos ferroviarios, p. ej. vehículos de calderas; Adaptación de vehículos para su utilización sobre las vías férreas (chasis de transportadores montados sobre ruedas para su desplazamiento sobre raíles B65G 41/02; máquinas sobre ruedas utilizadas para la construcción o entretenimiento de vías E01B).
PDF original: ES-2779779_T3.pdf
Fragmento de la descripción:
Vehículo de mantenimiento y procedimiento
La invención se refiere a un vehículo de mantenimiento y a un procedimiento para llevar a cabo trabajos de mantenimiento sobre una sección de una vía de acuerdo con las características enumeradas en el preámbulo de la reivindicación 1 o 9.
Por el documento DE 20 2004 013 732 U1 se conoce un vehículo de mantenimiento con un espacio de trabajo abierto hacia la vía. La zona final, superior en dirección vertical, del espacio de trabajo se forma por un bastidor de vehículo acodado hacia arriba, de modo que los trabajadores pueden trabajar sin obstáculos en la vía entre dos paredes laterales en una zona asegurada.
En un vehículo de trabajo de vía adicional, desvelado en el documento DE 92 06 335 U1, en la zona de una carrocería configurada en forma de puente está colocada una pluma configurada de manera articulada, con cuya ayuda puede colocarse una herramienta dispuesta sobre esta en una sección de terreno que se encuentra al lado de la vía.
El objetivo de la presente invención se sitúa ahora en la creación de un vehículo de mantenimiento del tipo mencionado al principio, con el que sea posible un tratamiento de la vía mejorado.
Este objetivo se consigue de acuerdo con la invención mediante las características de la invención mencionadas en la parte caracterizadora de la reivindicación 1 o 9.
Un equipamiento de este tipo del espacio de trabajo posibilita una descarga completa de los trabajadores de los esfuerzos físicos que resultan a partir del manejo de la herramienta de tratamiento de vía. Además, puede aumentarse la exactitud del resultado del trabajo mediante una guía precisa por el robot. Con el suministro de energía por los acoplamientos de medios ya no es necesario el uso de motores de combustión ruidosos que generan gases de escape.
Con la posibilidad de alojamiento de distintas herramientas de tratamiento de vía en el espacio de trabajo es posible cubrir en gran parte todos los trabajos requeridos para un completo mantenimiento de la vía. El uso de un trabajador puede limitarse esencialmente a funciones de control. En relación con un escaneo de los componentes de vía que van a tratarse está garantizado, por una parte, un uso preciso de la herramienta de tratamiento de vía y, por otro lado, también es posible una documentación final del resultado de trabajo.
Se desprenden ventajas adicionales de la invención a partir de las reivindicaciones dependientes y la descripción del dibujo.
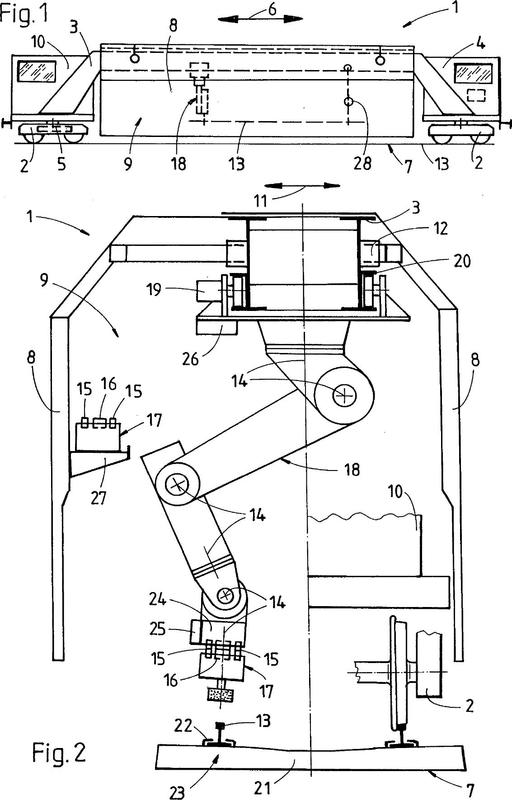
A continuación se describe en más detalle la invención mediante un ejemplo de realización representado en el dibujo. Muestran: la Figura 1, una vista lateral no simplificada de un vehículo de mantenimiento y, la Figura 2, un corte transversal ampliado a través del vehículo de mantenimiento que forma un espacio de trabajo.
Un vehículo de mantenimiento 1 representado en la Figura 1 presenta un bastidor de vehículo 3 apoyado por el lado final sobre bogies 2, así como una cabina de conducción 4. Con ayuda de un accionamiento de conducción 5 puede desplazarse el vehículo 1 en una dirección longitudinal de vehículo 6 sobre una vía 7. El bastidor de vehículo 3 está configurado entre los dos bogies 2 de manera acodada hacia arriba, por lo que entre dos paredes laterales 8 (véase la Figura 2) se delimita un espacio de trabajo 9 abierto en dirección hacia la vía 7, de otro modo sin embargo cerrado en sí por razones de seguridad. Se puede acceder al mismo desde una cabina de tripulación 10, de modo que no es necesario que los trabajadores ocupados en el espacio de trabajo 9 permanezcan en una zona de peligro situada fuera del vehículo de mantenimiento 1.
Como puede verse en la Figura 2, están previstas dos paredes laterales 8 distanciadas entre sí por un accionamiento 12 en una dirección transversal de vehículo 11 que discurre de manera normal con respecto a la dirección longitudinal de vehículo 6. En el ejemplo representado, para la creación de un espacio de trabajo 9 ampliado, únicamente la pared lateral izquierda 8 está desplazada en dirección transversal de vehículo 11, de modo que puede tratarse sin obstáculos un carril izquierdo 13 de la vía 7. En caso necesario, adicionalmente también la pared lateral derecha 8 opuesta puede desplazarse para una ampliación adicional del espacio de trabajo 9 con respecto al bastidor de vehículo 3 en dirección transversal de vehículo 11.
Para el tratamiento de una sección, colocada dentro del espacio de trabajo 9, de la vía 7 está dispuesto en el vehículo 1 un robot industrial 18 que presenta al menos tres ejes de movimiento 14, acoplamientos de medios 15 para un suministro de energía, así como un acoplamiento de herramienta 16 para la unión opcional con una herramienta de tratamiento de vía 17 (en la Figura 2 a modo de ejemplo una unidad amoladora de carriles) . El mismo está montado de manera desplazable por un accionamiento 19 sobre una guía de robot 20 que discurre en la dirección longitudinal de vehículo 6 y está fijada en el bastidor de vehículo 3.
Para un escaneo sin contacto de componentes de vía 23 accesibles dentro del espacio de trabajo 9 y compuestos por los carriles 13, traviesas 21 y pequeños materiales de vía 22 está equipado el robot industrial 18 en un extremo del lado de acoplamiento 24 con un sistema de sensores 25. Un equipo de control 26 asociado al robot industrial 18 está configurado adicionalmente para el control del robot para un almacenamiento de parámetros captados por el sistema de sensores 25 y que caracterizan la calidad del trabajo de los componentes de vía 23 tratados por el robot 18.
El robot industrial 18 está configurado para un acoplamiento automático con la herramienta de tratamiento de vía 17 almacenada para la selección sobre un soporte de herramientas 27 dentro del espacio de trabajo 9, así como su suministro de energía automático mediante los acoplamientos de medios 15 y para una operación de trabajo subsiguiente que discurre automáticamente en un modo de programa. En caso necesario, puede controlarse automáticamente mediante el equipo de control 26 también una operación de trabajo combinada del robot industrial 18 con un equilibrador de tensión de resorte 28 que puede desplazarse en el bastidor de vehículo 3 en dirección longitudinal de vehículo 6 (véase la Figura 1) , en particular para el montaje o desmontaje de los carriles 13. Con ello se facilita un manejo de piezas de carril pesadas por el robot industrial 18.
Para llevar a cabo trabajos de mantenimiento se detiene el vehículo 1 sobre una sección de vía que va a tratarse y mediante el desplazamiento de las dos paredes laterales 8 se crea el espacio de trabajo 9 requerido para el tratamiento sin obstáculos de los componentes de vía 23. Para una operación de trabajo planificada del robot industrial 18, tras la introducción de un código correspondiente en el equipo de control 26, se selecciona la herramienta de tratamiento de vía 17 adecuada de un grupo de herramientas prealmacenadas en el espacio de trabajo 9 sobre el soporte de herramientas 27 y se acoplan tanto mecánicamente como con respecto a un suministro de energía completo automáticamente al robot industrial 18.
El componente de vía 23 que va a tratarse por la herramienta de tratamiento de vía 17 se escanea sin contacto a continuación con ayuda del sistema de sensores 25 dispuesto en el robot industrial 18 para obtener para la operación de trabajo automática subsiguiente una base de referencia adecuada para un resultado de trabajo exacto. Este escaneo podría llevarse a cabo naturalmente por el robot industrial 18 también inmediatamente antes del acoplamiento con la herramienta de tratamiento de vía 17.
Opcionalmente puede efectuarse también durante la operación de trabajo por el sistema de sensores 25 un escaneo sin contacto del componente de vía 23, con preferencia de un carril 13 que va a someterse a amolado para comparar los datos de medición obtenidos de este modo con un estado teórico almacenado en el equipo de control 26. En caso de que la operación de trabajo, tal como por ejemplo en el amolado de carriles, esté compuesta por varias pasadas de trabajo, estas se repiten automáticamente hasta que por el sistema de sensores 25 se registra una consecución del estado teórico. Con ello se modifica automáticamente el desarrollo del programa para el robot industrial 18 para conseguir un resultado de trabajo óptimo. Debido a la capacidad de desplazamiento a lo largo de la guía de robot 20 puede usarse sin obstáculos el robot industrial 18 de manera optativa en todo el espacio de trabajo 9.
Para una operación de trabajo explicada en este...
Reivindicaciones:
1. Vehículo de mantenimiento (1) , compuesto por un bastidor de vehículo (3) apoyado por el lado de extremo sobre bogies (2) y con paredes laterales (8) dispuestas sobre el mismo para crear un espacio de trabajo (9) limitado por estas para trabajadores que se encuentran sobre una vía (7) ,
caracterizado por que
para el tratamiento de una sección de vía situada dentro del espacio de trabajo (9) está dispuesto en el vehículo (1) un robot industrial (18) , que presenta al menos tres ejes de movimiento (14) , acoplamientos de medios (15) para un suministro de energía, así como un acoplamiento de herramienta (16) para la unión opcional a una herramienta de tratamiento de vía (17) .
2. Vehículo según la reivindicación 1, caracterizado por que
las paredes laterales (8) pueden distanciarse entre sí mediante accionamientos (12) en una dirección transversal de vehículo (11) que discurre de manera normal con respecto a una dirección longitudinal de vehículo (6) .
3. Vehículo según las reivindicaciones 1 o 2, caracterizado por que
el robot industrial (18) , de manera desplazable mediante un accionamiento (19) , está montado sobre una guía de robot (20) que discurre en una dirección longitudinal de vehículo (6) .
4. Vehículo según la reivindicación 3, caracterizado por que
la guía de robot (20) está dispuesta en el bastidor de vehículo (3) , que forma con respecto a una vertical una delimitación superior del espacio de trabajo (9) .
5. Vehículo según una de las reivindicaciones 1 a 4, caracterizado por que
el robot industrial (18) presenta un sistema de sensores (25) dispuesto en particular en un extremo del lado de acoplamiento (24) para un escaneo sin contacto de componentes de vía (23) accesibles dentro del espacio de trabajo (9) y compuestos por los carriles (13) , traviesas (21) y pequeños materiales de vía (22) .
6. Vehículo según una de las reivindicaciones 1 a 5, caracterizado por que
está configurado un equipo de control (26) asociado al robot industrial (18) para un almacenamiento de parámetros captados por el sistema de sensores (25) y que caracterizan la calidad del trabajo de los componentes de vía (23) tratados por el robot industrial (18) .
7. Vehículo según una de las reivindicaciones 1 a 6, caracterizado por que
el robot industrial (18) está configurado para un acoplamiento automático con la herramienta de tratamiento de vía (17) almacenada para la selección sobre un soporte de herramientas (27) dentro del espacio de trabajo (9) , así como su suministro de energía automático mediante los acoplamientos de medios (15) y para una operación de trabajo subsiguiente que discurre automáticamente en un modo de programa.
8. Vehículo según la reivindicación 6, caracterizado por que
el equipo de control (26) está configurado para una operación de trabajo combinada del robot industrial (18) con un equilibrador de tensión de resorte (28) que puede desplazarse en el bastidor de vehículo (3) en dirección longitudinal de vehículo (6) en particular para el montaje o el desmontaje de carriles (13) .
9. Procedimiento para llevar a cabo trabajos de mantenimiento sobre una sección de una vía (7) , que para crear un espacio de trabajo (9) seguro se delimita mediante un vehículo de mantenimiento (1) , caracterizado por las siguientes características:
a) una herramienta de tratamiento de vía (17) adecuada para una operación de trabajo planificada se selecciona de un grupo de herramientas (17) prealmacenadas en el espacio de trabajo (9) y se acopla, tanto mecánicamente como con respecto a un suministro de energía completo, automáticamente a un robot industrial (18) ,
b) con ayuda de un sistema de sensores (25) dispuesto en el robot industrial (18) se escanea sin contacto, para la creación de una base de referencia para una subsiguiente operación de trabajo automática de la herramienta (17) , un componente de vía (23) que va a tratarse.
10. Procedimiento según la reivindicación 9, caracterizado por que
durante la operación de trabajo, mediante el sistema de sensores (25) se efectúa un escaneo sin contacto del componente de vía (23) , con preferencia de un carril (13) que va a someterse a amolado, y los datos de medición obtenidos se comparan con un estado teórico almacenado.
11. Procedimiento según la reivindicación 10, caracterizado por que
la operación de trabajo se compone de varias pasadas de trabajo que se repiten automáticamente hasta que el sistema de sensores (25) registra una consecución del estado teórico.
Patentes similares o relacionadas:
Vehículo ferroviario y procedimiento para el funcionamiento de un vehículo ferroviario, del 15 de Julio de 2020, de Plasser & Theurer Export von Bahnbaumaschinen Gesellschaft m.b.H: Vehículo ferroviario con un bastidor de vehículo apoyado sobre chasis ferroviarios y con un sistema de accionamiento hidráulico […]
Equipo para esparcir adhesivos multicomponentes en una mezcla granular, así como procedimiento de rociado y uso del equipo, del 24 de Junio de 2020, de Hürlimann Railtec AG: Equipo para transportar adhesivos multicomponentes de al menos dos componentes fluidiformes (A, B) y todos los elementos necesarios para su esparcido […]
Vagón de construcción de vías férreas destinado a recoger y/o tender tramos de vía férrea, del 17 de Junio de 2020, de Plasser & Theurer Export von Bahnbaumaschinen GmbH: Vagón de construcción de vías férreas destinado a recoger y/o tender un tramo de vía férrea, que comprende un bastidor de vagón apoyado sobre mecanismos […]
Procedimiento de carga y descarga de un vehículo de transporte desplazable sobre carriles, del 20 de Mayo de 2020, de Plasser & Theurer Export von Bahnbaumaschinen Gesellschaft m.b.H: Procedimiento de carga y descarga de un vehículo de transporte desplazable sobre carriles y dotado de un contenedor de recepción de material a granel y un bastidor […]
Sistema, procedimiento y vagón ferroviario para el transporte de objetos sobre carriles, del 15 de Abril de 2020, de K&K Maschinenentwicklungs GmbH & Co. KG: Procedimiento para el suministro y la evacuación sobre carriles de material a y de vehículos de trabajos ferroviarios, en el que el material […]
Sistema y método para transportar un aparato de vías férreas, del 2 de Octubre de 2019, de Matisa Matériel Industriel SA: Sistema de transporte de aparatos de vías férreas, que comprende un vagón de transporte del aparato de vías férreas , el vagón de transporte […]
Vehículo de trabajo, máquina de construcción de vía y método de ajuste, del 22 de Mayo de 2019, de Zuercher Holding GmbH: Vehículo de trabajo (2, 2') para una máquina de construcción de vía , que presenta al menos una instalación de transporte de transferencia , que está acoplada con un […]
VAGÓN ALMACÉN, del 17 de Agosto de 2011, de FRANZ PLASSER BAHNBAUMASCHINEN- INDUSTRIEGESELLSCHAFT M.B.H.: Vagón almacén que comprende un contenedor de carga , que puede trasladarse sobre mecanismos de rodadura ferroviarios y que presenta una cinta transportadora de suelo […]