Procedimiento y dispositivo para la ampliación de distancia interaxial de imágenes estereoscópicas y secuencia de imágenes.
Procedimiento para generar NrP >≥ 2 perspectivas sintéticas a partir de una imagen estereoscópica alimentada con al menos N >≥
2 perspectivas, generándose al menos una perspectiva sintética LE en la dirección de visión de la cámara a la izquierda de la perspectiva de cámara alimentada más a la izquierda LC y al menos una perspectiva sintética RE en la dirección de visión de la cámara a la derecha de la perspectiva de cámara alimentada más a la derecha RC, calculándose o alimentándose en una primera etapa una tarjeta de disparidad Wohin de la perspectiva de cámara alimentada más a la izquierda LC hacia la perspectiva de cámara alimentada más a la derecha RC o,
generándose en una segunda etapa para cada línea en la tarjeta de disparidad Wohin de las perspectivas de cámara alimentadas LC y RC un campo pLC y un campo pRC, que comprenden como contenido de campo en cada caso punteros, siendo los contenidos de campo de pLC punteros hacia los elementos de imagen en la perspectiva de cámara alimentada más a la izquierda LC y siendo los contenidos de campo de pRC punteros hacia los contenidos de imagen en la perspectiva de cámara alimentada más a la derecha RC, en una tercera etapa se calcula una tarjeta de disparidad LE_Wohin de tal manera que para cada elemento de imagen con posición de píxel jll de cada línea de la nueva tarjeta de disparidad LE_Wohin se calcula un índice jllExtension con**Fórmula**
y**Fórmula**
con
LE_Wohin(jllExtension) ≥ -1, en el caso de que se trate de una oclusión derecha o LE_Wohin(jllExtension) ≥ -2, en el caso de que se trate de un elemento de imagen revelado como nuevo,
así como
se establecen pLC(jllExtension) ≥ jll y,
pRC(jllExtension) ≥ Wohin(jll), siendo**Fórmula**
y
leftCapture el número de la perspectiva en la que debe visualizarse LC,
rightCapture el número de la perspectiva en la que debe visualizarse RC y
siendo NrSegments el número de los píxeles por cada etapa de perspectiva con una disparidad dada de un píxel jll, en una cuarta etapa se generan las perspectivas sintéticas LE y RE mediante el empleo de la tarjeta de disparidad LE_Wohin y de los punteros de los campos pLC y pRC hacia los elementos de imagen de las perspectivas de cámara alimentadas LC y RC,
para la tarjeta de disparidad LE_Wohin y la tarjeta de disparidad Wohin se aplica que para cada elemento de imagen de la perspectiva alimentada más a la izquierda se introduce el puntero hacia el pixel correspondiente de la perspectiva alimentada más a la derecha, y
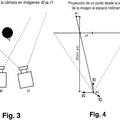
estando situadas ambas perspectivas sintéticas LE y RE a la izquierda y a la derecha en la prolongación de la línea de unión entre las perspectivas de cámara alimentadas más a la izquierda y más a la izquierda LC y RC.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/DE2012/000042.
Solicitante: psHolix AG.
Nacionalidad solicitante: Suiza.
Dirección: Steinenberg 19 4051 Basel SUIZA.
Inventor/es: NASKE,ROLF-DIETER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H04N13/00 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04N TRANSMISION DE IMAGENES, p. ej. TELEVISION. › Sistemas de video estereoscópico; Sistemas de video multivista; Sus detalles.
PDF original: ES-2662884_T3.pdf
Patentes similares o relacionadas:
SISTEMA PARA ACOPLAR UN DISPOSITIVO DE DIGITALIZACIÓN DE IMÁGENES A UN INSTRUMENTO ÓPTICO, del 21 de Noviembre de 2019, de Spotlab, S.L: 1. Sistema para acoplar un dispositivo de digitalización de imágenes, que comprende al menos una lente, a un instrumento óptico que comprende […]
Seguimiento tridimensional de un dispositivo de control del usuario en un volumen, del 30 de Octubre de 2019, de zSpace, Inc: Un método que comprende: recibir múltiples imágenes capturadas de al menos un punto visualmente indicado de un dispositivo de control del usuario […]
 Procedimiento de compresión de información de vídeo, del 30 de Octubre de 2019, de Broadmedia GC Corporation: Un procedimiento de compresión de información de vídeo, que comprende las etapas de:
- proyectar puntos de una imagen siguiente en puntos proyectados […]
Procedimiento de compresión de información de vídeo, del 30 de Octubre de 2019, de Broadmedia GC Corporation: Un procedimiento de compresión de información de vídeo, que comprende las etapas de:
- proyectar puntos de una imagen siguiente en puntos proyectados […]
Predicción residual avanzada simplificada para la 3d-hevc, del 14 de Junio de 2019, de QUALCOMM INCORPORATED: Un procedimiento de codificación de datos de vídeo, el procedimiento que comprende: determinar que un bloque actual (Actual) de una primera vista se codifica utilizando […]
Generación y codificación de imágenes integrales residuales, del 22 de Mayo de 2019, de Orange: Procedimiento de codificación de al menos una imagen integral actual (IIj) capturada por un dispositivo de captura de imágenes, que comprende las etapas siguientes: […]
Dispositivo de visualización auto-estereoscópico, del 27 de Marzo de 2019, de KONINKLIJKE PHILIPS N.V: Un dispositivo de visualización auto-estereoscópico que comprende: un medio de formación de la imagen que tiene una matriz bidimensional de píxeles de visualización […]
Dispositivo móvil de visualización 3D sin gafas, procedimiento de configuración del mismo, y procedimiento de uso del mismo, del 20 de Marzo de 2019, de SAMSUNG ELECTRONICS CO., LTD.: Un dispositivo de visualización tridimensional (3D) sin gafas que comprende: un dispositivo de visualización que comprende un monitor […]
Síntesis de visualización en vídeo 3D, del 6 de Marzo de 2019, de QUALCOMM INCORPORATED: Un procedimiento de descodificación de datos de vídeo de múltiples visualizaciones, el procedimiento que comprende: determinar si un índice […]