SISTEMA PARA CONTROL DEL ESFUERZO PESQUERO DE UNA EMBARCACIÓN DE UNA FLOTA DE ARRASTRE.
El sistema para el control del esfuerzo pesquero de una embarcación de una flota de arrastre implementa un método que asigna a una embarcación (1) una cuota de esfuerzo pesquero durante un periodo de tiempo concreto;
realiza un proceso de asignación de una categoría a un aparejo de pesca de la embarcación (1) mediante la ejecución de un algoritmo en un procesador (6) y captura, por unos medios de control (5), datos técnicos del aparejo de pesca realizando una medición real del esfuerzo pesquero de la embarcación (1) y una medición de las dimensiones de una red (2) cuando la misma se encuentra desplegada; recoge y sistematiza la información obtenida tras la medición real para determinar cuándo, al menos la embarcación (1), ha agotado su cuota de esfuerzo pesquero; y compara el resultado de dicha Resistencia Rred con la medición real en función de la categoría del arte de pesca, el tiempo de pesca y la velocidad.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201530243.
Solicitante: SIMRAD SPAIN, S.L.
Nacionalidad solicitante: España.
Inventor/es: SOLER MARTÍNEZ,Ignacio, MAYANS FERNÁNDEZ,Agustín.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06F17/00 FISICA. › G06 CALCULO; CONTEO. › G06F PROCESAMIENTO ELECTRICO DE DATOS DIGITALES (sistemas de computadores basados en modelos de cálculo específicos G06N). › Equipo o métodos de procesamiento de datos o de cálculo digital, especialmente adaptados para funciones específicas (recuperación de la información, estructuras de las bases de datos o estructuras de los sistemas de archivos G06F 16/00).
Fragmento de la descripción:
SECTOR DE LA TÉCNICA
La presente invención se refiere a un sistema para el control del esfuerzo pesquero de una embarcación de una flota de arrastre. La invención se centra en calcular dicho esfuerzo pesquero realizado por una embarcación con el fin de asegurar la soslenibilidad de los recursos pesqueros de una área marítima, por ejemplo el mar Mediterráneo.
El campo de aplicación de la presente invención se enmarca dentro del sector de la pesca, centrándose particularmente en el ámbito del control de los recursos, siendo de especial aplicación a mares con stocks pequeños multí-especie.
ANTECEDENTES DE LA INVENCiÓN
Como es sabido, la Unión Europea define el esfuerzo pesquero como la capacidad pesquera multiplicada por la actividad pesquera, calculada en base al tiempo invertido en una zona determinada.
En el contexto de la política pesquera de la Comunidad Europea, la capacidad de pesca ha sido hasta ahora calculada sobre la base de las características de los embarcaciones. Los indicadores utilizados actualmente son el tonelaje del casco, lo que indica su volumen cerrado, y la potencia del motor.
En base a los conceptos citados, la regulación del esfuerzo pesquero en el mar Mediterráneo se ha dirigido a reducir el número de embarcaciones, sin embargo, el resultado de esta política es una flota más pequeña (en número de embarcaciones) , pero con mayor capacidad de pesca.
Ello se debe a que la potencia de los motores, en la mayoría de embarcaciones, se ha incrementado mucho sin que las cifras oficiales lo hayan reflejado. Para constatarlo, sólo hay que visitar los puertos y ver puertas deflectoras con más de 1.000Kg colgando de un embarcación con una potencia declarada de 300CV, lo que impide que los cálculos que se realizan sean reales, ya que con potencias mayores, el tiempo de desplazamiento al
caladero es menor y en teoría las opciones de pesca mayores, aunque también es mayor el consumo de combustible y la rentabilidad se ve afectada negativamente.
Por otro lado, se ha comprobado que no siempre es cierto que una embarcación con motor más potente tenga un esfuerzo pesquero mayor que una embarcación con un motor de menor potencia. Esto es debido a que no se tiene en cuenta el tiempo efectivamente dedicado a la pesca respecto del tiempo empleado en la navegación para llegar al caladero. Por supuesto, con un motor de mayor potencia, el arte de pesca puede tener unas mayores dimensiones y, en la misma área, la pesca podrá ser mayor que con un motor menos potente, pero como ya se ha mencionado, no se está teniendo en cuenta el tiempo de pesca real empleado. Durante el horario de pesca autorizado hay un tiempo dedicado a navegar y otro a pescar y el primero no se está considerando en el cálculo del esfuerzo pesquero.
Actualmente, el control del esfuerzo pesquero se basa en el tiempo que una embarcación está fuera del puerto, en el arqueo o capacidad utilizable de la embarcación (medido en GTs) y en la potencia de su motor. Es decir, no refleja exclusivamente el tiempo que la embarcación está pescando, sino que incluye el tiempo de desplazamiento que la embarcación tarda en llegar al caladero y el tiempo de vuelta al puerto.
Un objetivo de la presente invención es, pues, desarrollar un nuevo método y sistema de control para medir el esfuerzo pesquero en pesca de arrastre que evite tales inconvenientes mediante la utilización de un método de control y un sistema conectado a una base de registro de datos.
La invención permite conocer el esfuerzo real de una embarcación (barco o buque) y en consecuencia de una flota pesquera, así como las zonas que soportan un esfuerzo pesquero elevado con el fin de posibilitar poner en barbecho dichas zonas.
BREVE EXPLICACiÓN DE LA INVENCiÓN
La presente invención proporciona la descripción de un método para control del esfuerzo pesquero de una embarcación (barco o buque) de una flota de arrastre, en particular cuando la flota de arrastre está sobre un caladero determinado. El método, al igual que los métodos conocidos en el estado de la técnica comprende:
a) asignar a al menos una embarcación una cuota de esfuerzo pesquero durante un periodo de tiempo concreto;
b) capturar, mediante unos medios de control que incluyen unos sensores conectados con un procesador instalado en dicha embarcación, datos técnicos de un aparejo de pesca de la embarcación realizando una medición real del esfuerzo pesquero de la embarcación y una medición de las dimensiones de al menos una red cuando la misma se encuentra desplegada, y almacenar los datos obtenidos en la medición; y
c) recoger y sistematizar la información obtenida tras la medición real para determinar cuándo, al menos la embarcación, ha agotado su cuota de esfuerzo pesquero.
De manera característica, el método propuesto, previamente a dicha etapa b) , realiza un proceso de asignación de una categoría al aparejo de pesca mediante la ejecución de un algoritmo en dicho procesador. El algoritmo calcula una vez introducido el plano de dicha red: el círculo de pesca a la altura de la boca en la relinga de plomos y la longitud de la red estirada sin incluir el copo, ya partir de los dos valores calculados, calcula la resistencia de la red según la siguiente fórmula: Rred = [8 x a x b x v2 x d I L] x (1+sen a) , donde: Rred= Resistencia de la red (kg) , a= Círculo de pesca a la altura de la boca en la relinga de plomos, b= Longitud de la red estirada, sin incluir el copo, v= Velocidad de arrastre (kn) Tomando 3 nudos como velocidad estándar, d= Diámetro promedio de los hilos que componen la red (mm) , L= longitud promedio de las mallas de todos los paños que componen la red (mm) y Sen a= Seno del ángulo que ofrece el paño de la visera al ataque. Además, el método propuesto efectúa una comparación del resultado de dicha Resistencia Rred con la medición real obtenida en la etapa b) en función de la categoría del arte de pesca, el tiempo de pesca y la velocidad.
Preferiblemente, el cálculo del círculo de pesca se realiza mediante la siguiente fórmula: a = l (N# x ME) ] x eh (m) , donde N# es el número de mallas, ME es la longitud de la malla estirada y eh es el coeficiente de armado horizontal de la malla, todo ello medido a la altura de la boca en la relinga de plomos.
El cálculo de la longitud de la red estirada sin incluir el copo se realiza también de manera preferida mediante la siguiente fórmula: b= ~==l (N#VPSi * MEi) , donde N#VPSi. .. n = Número de mallas desde el plano superior 1 hasta el plano superior n de la red (2) en sentido longitudinal y MEi es la longitud de la malla estirada en cada uno de los planos superiores.
Respecto a la etapa a) , generalmente será un administrador (normalmente la Administración Pública) el responsable de asignar la cuota anual de esfuerzo de pesca real, tanto de área barrida por la red, como de volumen de agua filtrada por la misma, para cada embarcación registrada.
La cuota de esfuerzo de pesca real asignada a cada embarcación, será la base sobre la que se irá descontando el esfuerzo realizado diariamente. El consumo de la cuota de esfuerzo asignada variará en función de la red utilizada. Con el algoritmo o software del procesador, el armador o usuario podrá ver cuál es el esfuerzo que está consumiendo en cada momento, así como el restante, tanto en volumen como en área.
Una vez alcanzado el límite de una de las dos cuotas de esfuerzo asignada (área o volumen) la embarcación deberá cesar su operación hasta la asignación de una nueva cuota.
Al obtener el esfuerzo real, la limitación de horas puede eliminarse, permitiendo que las embarcaciones tengan un horario flexible, más adaptado a las horas de Solo buen tiempo en las que se rentabilice la operación. De este modo se pueden ahorrar muchísimas horas de navegación, con lo que los costes operativos serán menores.
La etapa c) de recogida y sistematización de la información, permite gestionar el esfuerzo global de una flota pesquera sobre un caladero determinado. Esto se puede realizar mediante la división del caladero en partes más pequeñas, a las que se les asigna también una cuota de esfuerzo pesquero, de manera que se puedan dejar en barbecho aquéllas zonas en las que dicha cuota se alcance. Por ejemplo, el caladero se puede referenciar en una rejilla con una resolución de 1 minuto de latitud x 1 minuto de longitud, de forma que se pueda tratar en coordenadas UL. Al comenzar el lance se empezará a asignar a cada celda el esfuerzo realizado sobre la misma.
Asimismo, la medición real del esfuerzo pesquero puede comprender además:
el registro de la posición y velocidad de la embarcación en el procesador...
Reivindicaciones:
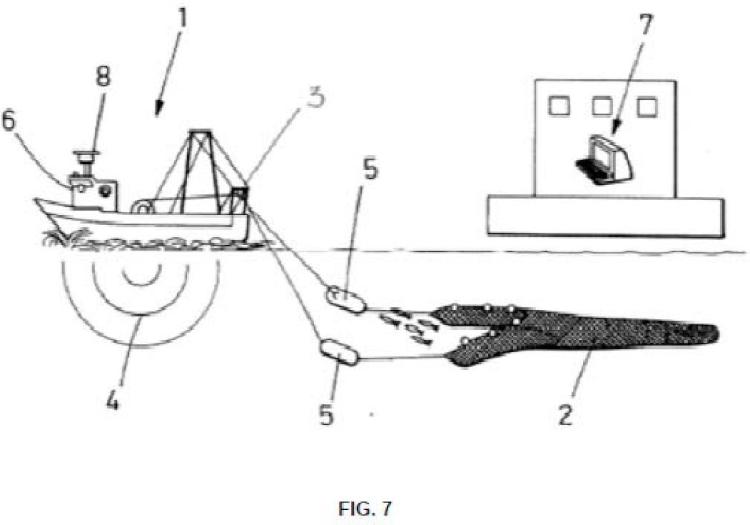
1. Sistema para control del esfuerzo pesquero de una embarcación de una flota de arrastre, comprende: -al menos un procesador (6) instalado en dicha embarcación (1) ;
-medios de localización de la embarcación (1) incluyendo un dispositivo GPS conectado con el procesador (6) para proporcionar al mismo la velocidad y posición de la embarcación (1) ;
-al menos una maquinilla o torno (3) para el enrollado y desenrollado de los cables de al menos una red (2) de arrastre de la embarcación (1) , donde dicha maquinilla o torno (3) incluye unos medios de control (3) de la situación del cable de red comprendiendo al menos un sensor conectado con el procesador (6) , y
-medios de control (5) que incluyen unos sensores en las alas y en la red (2) conectados con el procesador (6) para el control al menos de las dimensiones de la red (2) cuando la misma se encuentra desplegada,
caracterizado porque dicho procesador (6) se aplica a la ejecución de un algoritmo que a partir de un plano de dicha red (2) introducido en el procesador (6) calcula:
• circulo de pesca a la altura de la boca en la relinga de plomos;
• longitud de la red estirada sin incluir el copo, a partir de cuyos dos valores calculados, dicho algoritmo calcula la resistencia de la red según la siguiente fórmula:
Rred = (8 x a x b x v2 x d I L] x (1 +sen a) ;
siendo: Rred= Resistencia de la red (kg) , a= Círculo de pesca a la altura de la boca en la relinga de plomos, b= Longitud de la red estirada, sin incluir el copo, v= Velocidad de arrastre (kn ) Tomando 3 nudos como velocidad estándar, d= Diámetro promedio de los hilos que componen la red (mm) , L= longitud promedio de las mallas de todos los paños que componen la red (mm) , y Sen 0= Seno del ángulo que ofrece el paño de la visera al ataque; y
efectuando además dicho algoritmo una comparación del resultado de dicha Resistencia Rred con una medición real obtenida por dichos medios de control (5) .
2. Sistema, según la reivindicación 1, caracterizado porque el procesador calcula dicho círculo de pesca mediante la siguiente fórmula:
a = [ (N# x ME) ] x eh (m)
donde: N# es el número de mallas, ME es la longitud de la malla estirada y eh es el coeficiente de armado horizontal de la malla, todo ello medido a la altura de la boca en la relinga de plomos.
3. Sistema, según la reivindicación 1, caracterizado porque el procesador realiza el cálculo de la longitud de la red estirada sin incluir el copo mediante la siguiente fórmula:
donde: N#VPSi .. n = Número de mallas desde el plano superior 1 hasta el plano superior n de la red (2) en sentido longitudinal y MEi es la longitud de la malla estirada en cada uno de los planos superiores.
4. Sistema, según una cualquiera de las reivindicaciones anteriores, caracterizado
porque el procesador realiza la medición real del esfuerzo pesquero mediante: El dispositivo GPS que conectado al procesador (6) transmite información al procesador (6) para registra la posición y velocidad de la embarcación (1) en dicho procesador (6) desde la salida de un puerto hasta la vuelta al mismo; La al menos una maquinilla o torno (3) de la embarcación (1) que conectado con el procesador (6) se activa para desplegar un cable de la red (2) así como la longitud de dicho cable desplegado, a partir de la información transmitida por un sensor dispuesto en dicho torno (3) que es al menos uno, registrándose en dicho procesador (6) ; Sensores que conectados con el procesador permiten registrar la distancia vertical de la boca de la red (2) y distancia horizontal de la abertura entre las puertas deflectoras o alas; El sensor del torno (3) que conectado con el procesador (6) permite que este registre la información de la recogida de los cables de la red (2) , una vez que el tiempo de pesca ha expirado, y
-Los diferentes componentes conectados con el procesador (6) permite registrar los datos de superficie de fondo barrido y volumen de agua filtrado.
5. Sistema según la reivindicación 1, caracterizado porque comprende un modem conectado con el procesador (6) para transmisión a una base de registro de datos (7) en tierra.
Fondo de trabajo: 750 metros , , , E .• peclo objetivo: Gamba Roja , ,
,
,
, "
;J .. "...
,
, '" , . NavegacIón 1
Arrastre
, , ' 21, l NM
19, ONM
" 3h 28'
,
, .{l..
5h 36'
Navegación 2
...... 24, ONM
t:$, ' ....2h 32'
,
" -,
,
-
, --
Fig. lA
Fondo de trabajo: 80 a 330 metros Especie objetivo: Pescado
Navegacíón 3
NM
lh 05'
Arrastre 1
13, 8 NM
3h50'
\)
NavegacIón 1
Arrastre 3
5, 57 NM
7, 60 NM
Oh2~, '
, 2h 12'
,
,
,
,
-;; -------Navegación 2 Navegación 4 1, 92 NM 15, 8NM Oh 15'
lh 32'
Fig. lB
Total Navegación:
45, 1 NM . 6horas Total Pesca: 30, 28 NM • 8h 48'
Total Navegaclón: 35, 29 NM • 3h 17'
Patentes similares o relacionadas:
SISTEMA DE PREPARACIÓN DE ALIMENTOS, del 2 de Junio de 2020, de BSH ELECTRODOMESTICOS ESPAÑA S.A.: Sistema de preparación de alimentos. La presente invención hace referencia a un sistema de preparación de alimentos (10a) con al menos una unidad […]
MÉTODO PARA CONSTRUCCIÓN DE SISTEMA DE PROTECCIÓN SOLAR PARA FACHADAS DE EDIFICIOS, del 28 de Mayo de 2020, de PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE: La presente invención se relaciona con un método para producir un sistema de protección solar en fachada de edificio que comprende las siguientes etapas, […]
Sistemas, métodos e interfaces para proporcionar versiones de libros electrónicos dentro de un dispositivo de acceso, del 27 de Mayo de 2020, de Thomson Reuters Enterprise Centre GmbH: Un dispositivo de acceso que comprende: a. un procesador ; b. una memoria acoplada al procesador ; y c. un programa de software de […]
SISTEMA DE PREPARACIÓN DE ALIMENTOS, del 27 de Mayo de 2020, de BSH ELECTRODOMESTICOS ESPAÑA S.A.: Sistema de preparación de alimentos. La presente invención hace referencia a un sistema de preparación de alimentos (10a) con al menos una unidad […]
SISTEMA DE PREPARACIÓN DE ALIMENTOS, del 27 de Mayo de 2020, de BSH ELECTRODOMESTICOS ESPAÑA S.A.: Sistema de preparación de alimentos. La presente invención hace referencia a un sistema de preparación de alimentos (10a) con al menos una […]
CONFIGURACIÓN Y VISUALIZACIÓN DE UNA INTERFAZ DE USUARIO CON ESTUDIOS DE ATENCIÓN SANITARIA, del 22 de Mayo de 2020, de FUJIFILM MEDICAL SYSTEMS USA INC: Configuración y visualización de una interfaz de usuario con estudios de atención sanitaria. Método y aparato para configurar y visualizar una interfaz de […]
Sistema y procedimiento de control de calidad de platos preparados, del 14 de Mayo de 2020, de BEABLOO, S.L: Sistema y procedimiento de control de calidad de platos preparados. El sistema comprende medios de detección para detectar los ingredientes […]
Método para establecer un ángulo de conformación para un producto conformado tridimensional, del 15 de Abril de 2020, de MATSUURA MACHINERY CORPORATION: Un método para establecer ángulos de conformación en un método de conformación para un producto conformado tridimensional que tiene una región de corte […]